Навигация
Последовательные и параллельные корректирующие звенья оказывают качественно противоположное воздействие на ПФ корректируемого звена;
11591
знак
0
таблиц
20
изображений
1. Последовательные и параллельные корректирующие звенья оказывают качественно противоположное воздействие на ПФ корректируемого звена;
2. Тип ПФ параллельного корректирующего звена, эквивалентного по воздействию последовательному звену, зависит от ПФ охватываемого звена;
3. Параллельное корректирующее звено уменьшает ошибки, связанные с нестабильностью параметров охватываемых звеньев, тогда как нестабильность последовательного корректирующего звена полностью входит в нестабильность системы. С этой точки зрения использование параллельных корректирующих звеньев предпочтительнее.
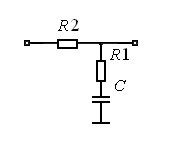
Типы параллельных и последовательных корректирующих звеньевНаиболее широко распространены корректирующие звенья в виде RC-цепей.
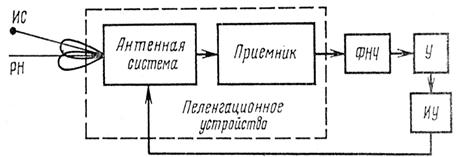
В качестве последовательных корректирующих звеньев используется звено с опережением по фазе (рис.2) звено с отставанием по фазе (рис.4) и интегро-дифференцирующее звено (Рис.6), обеспечивающее опережение по фазе в одном диапазоне частот и отставание – в другом.
Рис.2. Схема звена с опережением по фазе.
Характеристики звена с опережением по фазе:
 ;
; ![]() ;
; ![]() ;
;
 ;
; ![]() ;
;
![]() ;
;
Логарифмические АЧХ и ФЧХ изображены на рис.3.
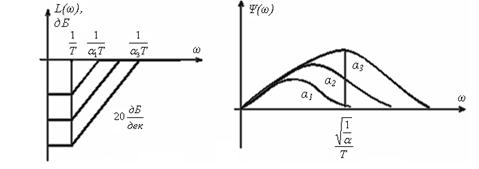
Рис.3. Логарифмические характеристики звена с опережением по фазе.
Звено используется для расширения полосы пропускания следящей системы. Максимальный фазовый сдвиг
![]()
на частоте
 .
.
Звено с отставанием по фазе (пропорционально-интегрирующее звено):

Рис.4. Схема звена с отставанием по фазе
Характеристики звена:
 ;
; ![]() ;
; ![]() ;
; ![]()
 ;
;
![]() ;
; ![]()
Логарифмические характеристики звена приведены на рис.7.5.
Звено обеспечивает отрицательный фазовый сдвиг на всех частотах, кроме
 |
0 и
![]()
на частоте
 .
.

Рис.5. Логарифмические характеристики звена с отставанием по фазе
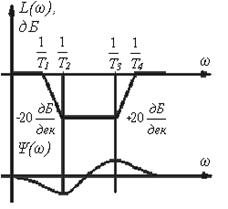
Комбинированное (интегро-дифференцирующее) звено:

Рис.6. Схема и логарифмические характеристики комбинированного звена.
Передаточная функция звена:
![]() ,
,
где ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() .
.
Рассмотрим влияние жесткой и гибкой обратных связей на параметры охватываемых звеньев.
Охватим жесткой обратной связью апериодическое звено (рис.7).
Рис.7. Схема апериодического звена, охваченного жесткой обратной связью.
Определим передаточную функцию звена:
 ;
; ![]() ;
;  . (8)
. (8)
Как следует из (8), характер звена не изменился, но коэффициент усиления уменьшился в ![]() раз, и во столько же раз уменьшилась постоянная времени. Такой же эффект имеет место, если последовательно с апериодическим звеном включить звено, обеспечивающее опережение по фазе (рис.8).
раз, и во столько же раз уменьшилась постоянная времени. Такой же эффект имеет место, если последовательно с апериодическим звеном включить звено, обеспечивающее опережение по фазе (рис.8).

Рис.8. Эквивалентная схема с последовательно включенных звеном с опережением по фазе.
Здесь ![]() .
.
Охватим жесткой обратной связью идеальное интегрирующее звено (рис.9).
Рис.9. Схема идеального интегрирующего звена, охваченного жесткой обратной связью.
 ;
; ![]() ;
;  , (9)
, (9)
где ![]() .
.
Эквивалентная схема с последовательно включенным инерционным дифференцирующим звеном, обеспечивающим расширение полосы и опережение по фазе, приведена на рис.10.

Рис.10. Эквивалентная схема с последовательно включенным инерционным дифференцирующим звеном.
Здесь ![]() .
.
Эти два примера показывают, что использование жесткой обратной связи приводит к расширению полосы пропускания следящей системы и одновременному снижению коэффициента усиления системы, что является недостатком жесткой обратной связи.
При гибкой обратной связи на вход охватываемого звена подается производная входного воздействия. В качестве звеньев в цепях обратной связи используются тахогенераторы, RC – цепи, трансформаторы.
Охватим электродвигатель гибкой обратной связью (рис.11).
В цепь обратной связи включен тахогенератор (идеальное дифференцирующее звено). Передаточная функция тахогенератора W(jw) = kтг(jw).

Рис.11. Схема электродвигателя, охваченного гибкой обратной связью.
Частотная передаточная функция:

 .
.
Следовательно, при охвате электродвигателя гибкой обратной связью уменьшается коэффициент усиления ![]() и электромеханическая постоянная
и электромеханическая постоянная ![]() в (
в (![]() ) раз. Такой же эффект имеет место при охвате инерционного звена жесткой обратной связью.
) раз. Такой же эффект имеет место при охвате инерционного звена жесткой обратной связью.
Охватим гибкой обратной связью безынерционное звено (рис.12) В цепи ОС включено инерционное дифференцирующее звено.

Рис.12. Схема безинерционного звена, охваченного обратной связью
Определим передаточную функцию:
 ,
,
Такое включение эквивалентно последовательному включению с апериодическим звеном, звена обеспечивающего запаздывание по фазе (рис.13).
Здесь
![]() ;
;  ;
;

Рис.13. Эквивалентная схема с последовательно включенным звеном с отставанием по фазе.
Включение инерционного дифференцирующего звена последовательно обеспечивает расширение полосы. Включение этого же звена в цепь обратной связи проводит к качественно противоположному эффекту.
Охватим безинерционное звено обратной связью, посредством апериодического звена первого порядка (рис.14)

Рис.15. Схема безинерционного звена, охваченного обратной связью
 ;
;
 .
.
Эквивалентная схема с последовательно включенным корректирующим звеном приведена на рис.16.
Здесь
![]() ;
; ![]() ;
;

Рис.16. Эквивалентная схема с последовательно включенным корректирующим звеном.
Апериодическое звено первого порядка, включенное последовательно обеспечивает сужение полосы и дополнительное запаздывание фазы. Это же звено, включенное в цепь ОС, обеспечивает расширение полосы и положительный сдвиг фазы.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш. шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов. / Под ред. В.А. Бесекерского. - М.: Высш. шк., 2005.
3. . Первачев С. В Радиоавтоматика: Учебник для вузов. - М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации / Под ред. М.И. Жодзишского – М.: Радио, 2000
Похожие работы




... состояние, отнесенное к единичному возмущению на входе. Единичным возмущением считают однопроцентное изменение входной величины объекта (перемещение регулирующего органа). 2. Динамические ошибки в системах авторегулирования Системы автоматического регулирования всегда находятся под влиянием двух видов воздействий: задающего и возмущающего. Задающее воздействие определяет, каким должен ...

... Рис. 6 Рис. 7 Схема моделирования показана на рис. 8. Рис.8 Исследование устойчивости для удобства сравнения проводится на трех моделях, отличающихся структурой или параметрами. 2.Оптимальные линейные САР Задача оптимального синтеза линейной системы авторегулирования при случайных воздействиях заключается в определении такой структуры и параметров системы, при ...

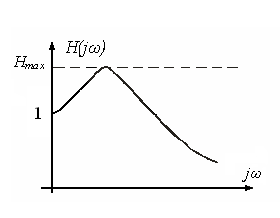


... звенья, у которых Н(0) = 1, показателем колебательности является абсолютный максимум АЧХ (рис.2): . Рекомендуемые значения показателя колебательности - 1,1…1.5. Анализ установившейся (динамической) ошибки Оценка показателей качества следящей системы производится при следующих типовых воздействиях: - линейное; - квадратичное; - полиномиальное. Линейное воздействие имеет место, в ...

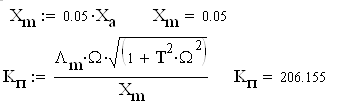

... следит система. Целью проектирования является расчет основных параметров системы, удовлетворяющих системе заданных показателей качества. Исходные данные Система автосопровождения источника сигнала по направлению (АСН). Порядок астатизма системы – первый. Постоянная времени простого инерционного звена: T = 0,5 с. Максимальная скорость воздействия: a1 = 10 º/с. Максимальное ускорение ...
0 комментариев