Навигация
1. Синусный механизм
Синусный механизм с низшими парами (рис.1, а ) — разновидность четырёхзвенного кулисного механизма. В приборных устройствах обычно кулисный камень 2, входящий в две низшие пары, отсутствует, а его заменяет высшая пара (рис.1, б). Это повышает точность механизма и уменьшает трение. Наиболее рационально применение высшей пары с точечным контактом (сфера — плоскость), в этом случае число избыточных связей q = 0 — механизм статически определимый.
Функция положения механизма, изображённого на рис. 1(б) при ведущем рычаге 2 (зависимость линейного перемещения l ведомого звена 1 от угла поворота j ведущего) выражается формулой :
l = r * sin j (1)
Передаточная функция механизма в виде отношения линейной скорости кулисы и угловой скорости рычага
 (2)
(2)
При малых значениях угла j, ![]() , следовательно, в этом случае механизм приближённо даёт линейную зависимость между l и j
, следовательно, в этом случае механизм приближённо даёт линейную зависимость между l и j
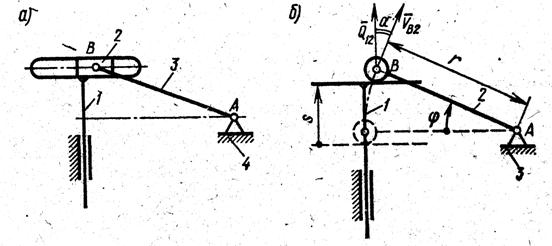
Рис.1(а, б).
Погрешность схемы (теоретическая ошибка) при осуществлении заданной линейной зависимости между входным и выходным перемещениями найдётся из выражения :
 (3)
(3)
Заменив  (4)
(4)
получим:  (5)
(5)
Для определения искомой длины r рычага (при заданном максимальном перемещении lmax и коэффициенте пропорциональности к) применим полином Чебышева Р3 (х), наименее уклоняющийся от нуля в промежутке [ 0 £ x £ 1 ]; узлы интерполяции соответствуют значениям корней полинома х=0; х=0,4641, х=0,9282. Задача сводится к решению относительно r уравнения ![]() , или в развернутом виде :
, или в развернутом виде :
 (6)
(6)
Решая это уравнение, получаем r = 5(мм); при ![]() .
.
 отсюда
отсюда ![]()
Передаточная функция механизма в виде отношения линейной скорости кулисы и угловой скорости рычага:
Для синусного механизма
1. Погрешность в длине рычага dr .
Коэффициент влияния этой ошибки:

2. Перекос плоскости кулисы (измерительного стержня) на угол db1
Коэффициент влияния этой ошибки

3. Погрешность начального положения рычага dy.
Коэффициент влияния определяется по формуле :
2. Кулисный механизм
Эти механизмы могут быть четырёхзвенными с низшими парами (рис.2а) или трехзвенными с высшими кинематическими парами (рис.2б); последний вариант механизма для приборов предпочтительнее — он проще, точнее, обладает меньшим трением. Наиболее рационально применение высшей пары с точечным контактом (сфере — плоскость), в этом случае число избыточных связей q = 0 — механизм статически определимый.
Кулисные механизмы, изображенные на рис.2б, в, обеспечивают различные направления вращения ведущего и ведомого звеньев;
если же АВ > l , то эти звенья вращаются в одном направлении (рис. 2г, д).
Схемы с ведущим кривошипом (рис. 2б, г) благоприятны в отношении углов давления ( a = 0 ). При ведущей кулисе (рис. 2, е, д) во избежание большого трения необходимо выполнить условие :
![]() (7)
(7)
(знак плюс для схемы на рис. 2 е, минус — для схемы на рис. 2 д).
Во многих случаях кулисный механизм с высшей парой играет роль передаточно-множительного механизма приборного устройства и служит для приближенного воспроизведения заданной линейной зависимости между углами поворота j и g ведущего и ведомого звеньев при ограниченных величинах этих углов.
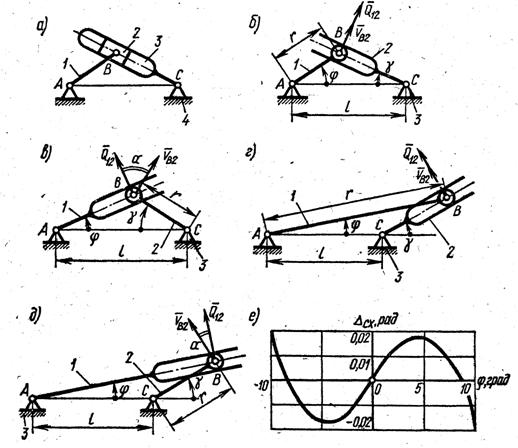
Рис 2(а, б, в, г, д, е)
Функция положения механизма в виде зависимости угла поворота g ведомого звена от угла поворота j ведущего звена (углы отсчитываются от линии АС стойки, положительные направления их показаны на чертеже) выражается следующими формулами:
при ведущем кривошипе (рис. 2, б, г).
![]() (8)
(8)
(знак плюс для схемы на рис. 2, б, минус для схемы на рис. 2, г);
В данном случае необходимо взять знак “ – “.

![]()
Передаточная функция (мгновенное передаточное отношение) механизма находится дифференцированием формулы (8), для схемы по рис. 2, г при ведущем кривошипе :
![]() (9)
(9)
При малых значениях угла j в формуле (9):
![]()
Следовательно, в этом случае механизм обеспечивает приближенную линейную зависимость между g и j.
Для кулисного механизма.
0 комментариев