Огляд аналогів розробляємої комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Техніко-економічне обґрунтування доцільності розробки комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Проведення маркетингових досліджень
Економічна доцільність нової технічної розробки
Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Розробка первинного вимірювального перетворювача
Розробка пристрою спряження перетворювача з ПЕОМ
КОм (5.2)
Розробка програмного забезпечення
Розрахунок похибки вимірювання кутової швидкості
Економічна частина
Розрахунок виробничої собівартості комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Розрахунок експлуатаційних витрат для нового пристрою
Погіршення стану здоров’я користувачів ЕОМ, які пов’язані зі стресом
Дія іонізуючих випромінювань та електромагнітного імпульсу на радіоелектронні системи
Мета та вихідні дані для проведення робіт
Навигация
КОм (5.2)
Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом
129405
знаков
15
таблиц
14
изображений
Обираємо резистор С2-23 - 100 кОм.
В якості балансировочних резисторів обираємо резистори СП-5 – 150 кОм у відповідності з рекомендаціями [19].
6/ Розробка схеми програми роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом та програмного забезпечення
6.1 Розробка схеми програми роботи пристрою
Розробку алгоритмічного та програмного забезпечення при вирішенні подібного типу задач вже можна починати при завершенні розробки функціональних схем апаратної частини.
Якщо задача на розробку поставлена, то для отримання алгоритму роботи пристрою необхідно виконати ряд послідовних дій [16]:
- детальний опис задачі;
- аналіз задачі;
- інженерну інтерпретацію задачі;
- розробку загального алгоритму функціонування;
- розробку деталізованих алгоритмів;
- розподілення робочих регістрів та пам'яті ЕОМ;
Після ввімкнення живлення відбувається початкова ініціалізація системи, тобто автоматичне скидання порту та обнулення його внутрішніх регістрів.
Після цього в порт записується керуюче слово, за яким імпульси з виходу генератора з кварцевою стабілізацією поступають на вхід запуску аналого-цифрового перетворювача. Після появи першого імпульсу формується запит на переривання, після чого проводиться очікування сигналу готовності АЦП.Після появи сигналу готовності АЦП перший байт його вихідного коду записується до порту. З порту він зчитується та записується в ОЗУ. Лічильник числа зчитувань з АЦП збільшується на одиницю. Після цього до ОЗУ заноситься другий байт даних.
Після цього обчислюється поточне значення часу за формулою:
![]() , (6.1)
, (6.1)
де ![]() - оптимальний період сигналу тактового генератора.
- оптимальний період сигналу тактового генератора.
Далі перевіряється, чи не перша це вибірка. Якщо перша, то здійснюється перехід на початок програми та зчитується друге слово з АЦП. Якщо вибірка не перша - обчислюється кутова швидкість за виразом:
![]() (6.2)
(6.2)
Значення кутової швидкості, кута повороту, поточного часу записується до файлу чи виводиться на екран монітору, а програма перевіряє, чи нема сигналу кінця вимірювань. Якщо його нема, здійснюється перехід на початок програми. Момент інерції роторної системи є одним з найважливіших її параметрів, що необхідно контролювати під час будь-яких випробувань. При наявності вимірювальної інформації про момент інерції та швидкісну діаграму об’єкту контролю можливе визначення динамічного моменту та моменту опору на валу. Визначення моменту інерції традиційними методами є складним та трудомістким процесом. Непряме визначення моменту інерції через вимірювання амплітуди крутильних коливань дає змогу автоматизувати його. Розглянемо рисунок 6.1, на якому наведено залежності кута повороту від часу при постійному значенні кутової швидкості та відсутності крутильних коливань ![]() та при наявності крутильних коливань
та при наявності крутильних коливань ![]() . Залежність кута повороту від часу в усталеному режимі роботи об’єкту контролю можна записати:
. Залежність кута повороту від часу в усталеному режимі роботи об’єкту контролю можна записати:
![]() , (6.3)
, (6.3)
де ![]() - середнє значення кутової швидкості,
- середнє значення кутової швидкості,
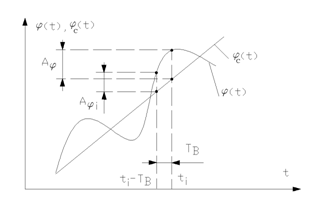
Рисунок 6.1 – До визначення моменту інерції ротора синхронної гістерезисної електричної машини з газомагнітним підвісом
Значення тангенсу кута нахилу прямої ![]() , який дорівнює середньому значенню кутової швидкості, визначається шляхом багаторазових визначень миттєвого значення кута повороту та послідуючого знаходження середньоарифметичного значення похідної сигналу при роботі об’єкту в усталеному режимі. Середнє значення кутової швидкості визначається виразом:
, який дорівнює середньому значенню кутової швидкості, визначається шляхом багаторазових визначень миттєвого значення кута повороту та послідуючого знаходження середньоарифметичного значення похідної сигналу при роботі об’єкту в усталеному режимі. Середнє значення кутової швидкості визначається виразом:
![]() , (6.4)
, (6.4)
де n - кількість визначених значень кутової швидкості; ТВ - крок дискретизації.
Складова виразу (6.2) ![]() має коливальний характер та залежить від наступних причин [40]:
має коливальний характер та залежить від наступних причин [40]:
- змінні електромагнітні сили в об’єкті контролю;
- несинусоїдальності розподілу магнітної індукції вздовж зазору;
- нерівномірності магнітної провідності вздовж осей;
- змінні механічні сили в об’єкті контролю;
- дисбаланс ротору, що приводить до виникнення змінних динамічних сил;
- зміна температури;
- місцеві деформації та гальмівні моменти;
- зовнішні фактори, що впливають на ступінь нерівномірності обертання ротора;
- коливання напруги живлення та значення навантаження;
- несиносоїдальність напруги живлення, нестабільність її частоти;
Для ЕМ з газомагнітним підвісом конічного ротору, домінуючою причиною, що обумовлює виникнення крутильних коливань є дисбаланс ротора. У цьому випадку, при умові знехтування іншими причинами виникають крутильні коливання:
![]() , (6.5)
, (6.5)
Величина ![]() , яка дорівнює різниці між значеннями кута повороту з урахуванням крутильних коливань та без їх урахування, визначається виразом:
, яка дорівнює різниці між значеннями кута повороту з урахуванням крутильних коливань та без їх урахування, визначається виразом:
![]() . (6.6)
. (6.6)
Для знаходження амплітуди крутильних коливань доцільно скористатись сплайн-інтерполяцією з послідуючим знаходженням середнього значення максимумів та мінімумів інтерполяційного сплайну.
Позначимо інтерполяційний сплайн через ![]() . Тоді амплітуда крутильних коливань визначається як середнє арифметичне модулів максимумів та мінімумів інтерполяційного сплайну:
. Тоді амплітуда крутильних коливань визначається як середнє арифметичне модулів максимумів та мінімумів інтерполяційного сплайну:
![]() , (6.7)
, (6.7)
де КMAX, КMIN - кількість максимумів та мінімумів інтерполяційного сплайну. Завдання знаходження максимумів та мінімумів інтерполяційного сплайну легко розв’язується відомими методами. Момент інерції визначається за виразом:
![]() (6.8).
(6.8).
Схему програми, що відповідає вище описаному алгоритму, наведено у графічній частині дипломного проекту.
0 комментариев