Навигация
6 Проблема управления
Стремление обеспечить минимум функционала ошибки Q0, характеризующей качество управления, обычно вступает в противоречие с условиями технической реализуемости, зависящей от сложности системы, ее стоимости, надежности и т. д. Действительно, чем выше качество управления, т. е. чем выше точность аппроксимации оптимального алгоритма управления, тем сложнее, дороже и ненадежнее управляющая система.
Проблема управления является даже не двух-, а многокритериальной задачей, что обеспечивает наивыгоднейшие условия компромисса между противоречивыми условиями качества и реализуемости управления. Вопросы проектирования САУ здесь не рассматриваются.

Рис. 8. Схема проблемы управления
Проблема управления может быть пояснена схемой, показанной на рис. 8. Цель управления задается функционалом Е0 (блок 1); в блоке 2, представляющем собой ЭВМ, определяется экстремум функционала
![]() (13)
(13)
в блоке 3 осуществляется сравнение оптимального значения Е0 с его действительным значением Едейств при использовании функционалов (12) и (13) и вычислении на ЭВМ:
![]() .
.
Функционал Q0 определяет качество управления при наличии случайных возмущающих воздействий.
Реализация управления по этому принципу представляет собой большие технические трудности. Одна из наиболее существенных—необходимость формирования ошибки ![]() по показателю цели управления Е0.
по показателю цели управления Е0.
Действительно, определение АЕ требует измерения всех переменных величин, от которых зависит результат и которые входят в выражение для цели управления E(t). Большинство из них не может быть оперативно определено в ходе процесса управления (либо из-за недостатка измерительных устройств, либо из-за того, что вычисление этих переменных может быть выполнено лишь за большой промежуток времени). Поэтому задача управления в изложенной ранее постановке заменяется более простой задачей, когда показатель качества управления
![]()
не зависит явно от ошибки в показателе цели управления Q(![]() ). В этом случае необходимость формирования сигнала об ошибке
). В этом случае необходимость формирования сигнала об ошибке ![]() отпадает и задача значительно упрощается. Таким показателем может служить точность управления, определяемая следующим образом. Рассмотрим вектор ошибки
отпадает и задача значительно упрощается. Таким показателем может служить точность управления, определяемая следующим образом. Рассмотрим вектор ошибки
![]() (14)
(14)
или
![]()
где ![]() ,
, ![]() —оптимальные векторы состояния и выходной переменной соответственно (получены на основании первичной оптимизации функционала Е, определяющего цель управления).
—оптимальные векторы состояния и выходной переменной соответственно (получены на основании первичной оптимизации функционала Е, определяющего цель управления).
Вектор состояния х(t) можно найти по результатам наблюдения или по данным измерения вектора наблюдения (см. рис. 16). Тогда этап вторичной оптимизации (собственно задача регулирования) не требует вычисления показателя цели управления E(t) и сводится к определению оптимального управляющего воздействия
![]() ,
,
где ![]() —оценка вектора состояния; k—некоторый переменный коэффициент.
—оценка вектора состояния; k—некоторый переменный коэффициент.
Другими словами, необходимо получить корректирующее воздействие
![]() ,
,
которое компенсирует все случайные возмущения, вызывающие отклонения от оптимального режима ![]() или от траектории объекта, вычисленной согласно первичной оптимизации, пренебрегающей этим возмущением.
или от траектории объекта, вычисленной согласно первичной оптимизации, пренебрегающей этим возмущением.
На рис. 9 показана возможная схема адаптивной (приспосабливающейся) системы управления, в которой экстремум цели управления Е(t) модифицируется под влиянием наблюдения действительных управляющих воздействий u(t) и вектора состояния х(t). Эта схема представляет собой двухконтурную систему управления.
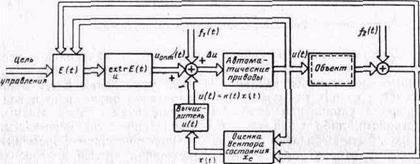
Рис. 9. Адаптивная (приспосабливающаяся) САУ
Конечно, этот косвенный метод решения проблемы управления в принципе менее совершенен, чем метод непосредственного измерения разности между оптимальным показателем цели управления Е0 и его реальным показателем Едейств согласно алгоритму (1). Но этот алгоритм, как отмечалось ранее, не реализуем в техническом отношении.
Поясним этапы первичной и вторичной оптимизации на примере системы управления самолетом. Этап первичной оптимизации связан с необходимостью получения максимальной точности вывода самолета на оптимальную траекторию при условии минимальной затраты топлива.
Этап вторичной оптимизации, согласно выражению вектора ошибки (14), необходим для достижения заданного конечного состояния в определенный момент (согласно оптимальной траектории, вычисленной на первом этапе оптимизации). Но это—траектория, вдоль которой полет самолета не осуществим из-за различных возмущений, действующих на самолет в полете. Эти возмущения, отклоняющие самолет от оптимальной траектории, необходимо компенсировать.
Отметим, что если бы величину одного из функционалов, например показателя цели управления Е можно было ограничить затратами на энергетику, расходуемыми рулями управления самолетом, то зависимости второго этапа оптимизации от первого не существовало бы и отпала бы проблема одновременной оптимизации двух взаимозависимых функционалов. Но на самом деле функционал Е, а также функционал Qx зависящий от отработки САУ оптимальной траектории и тоже требующий затрат на энергетику, т. е. формирования корректирующего воздействия v(t), взаимосвязаны.
Список используемой литературы:
1. В. В. Солодовников, В. Н. Плотников, А. В. Яковлев. Теория автоматического управления техническими системами. М.: МГТУ,1993. – 492 с., ил.
2. Основы автоматического управления. Под ред. В. С. Пугачёва
М.: Наука, 1968.
3. П. В. Куропаткин. Теория автоматического управления. М.: «Высшая школа», 1973 г. – 528с., ил.
4. А. А. Ерофеев. Теория автоматического управления. СПб.: Политехника, 1998. – 295 с.: ил.
[1] Активной является САР, содержащая источник (источники) энергии.
Похожие работы
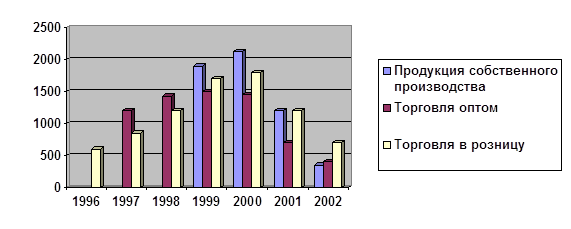
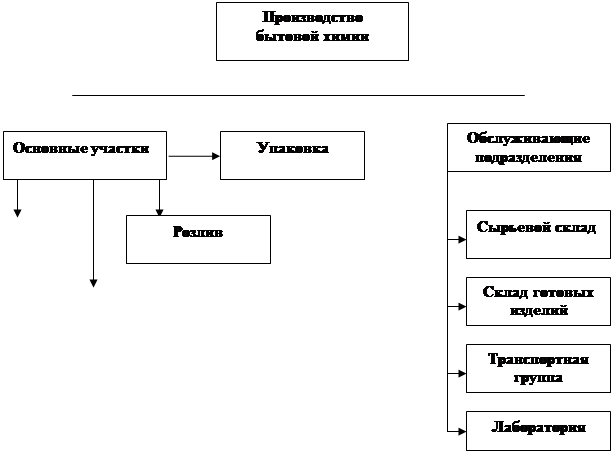
... и отстаивание; разлив; прикручивание пробки; наклеивание этикетки; упаковка и маркировка; хранение и транспортирование. Рис.1 Анализ продаж 2.2. Анализ и совершенствование системы организации и управления 2.2.1. Производственная структура Производственная структура предприятия – состав отделов, служб, их размещение и взаимосвязь, которые обеспечивают рациональное выполнение ...
... механизма координации функциональных и межфункциональных связей по достижению изменяющихся целей—с другой. Особенно важное значение при этом имеет разработка не только организационной структуры, но и организационных процессов управления. ГЛАВА 3. ТИПЫ ОРГАНИЗАЦИОННЫХ СТРУКТУР УПРАВЛЕНИЯ И УСЛОВИЯ ИХ ПРИМЕНЕНИЯ. 3.1. ТИПЫ СИСТЕМ УПРАВЛЕНИЯ (механистические и органические). Весьма важной для ...
... , многие считают, что практика опровергает ее. Они указывают на то, что менеджмент в 80-е годы часто отождествлялся с компаниями, в которых доминировала сильная личность. 5. Реализация принципов управления в современном менеджменте Время, в которое мы живем, - эпоха перемен. Наше общество осуществляет исключительно трудную, во многом противоречивую, но исторически неизбежную и необходимую ...
... БИОРЕАКТОРА Лист 90 Доклад. Уважаемые члены государственной экзаменационной комиссии разрешите представить вашему вниманию дипломный проект на тему: «Система автоматизированного управления процесса стерилизации биореактора» Процесс стерилизации биореактора (или ферментера) является важной стадией процесса биосинтеза антибиотика эритромицина. Суть процесса стерилизации состоит в ...
0 комментариев