Навигация
Цель управления в технических системах
45493
знака
0
таблиц
9
изображений
2 Цель управления в технических системах
Основной принцип управления — принцип отрицательной обратной связи — универсален, но специфика его применения существенно зависит от управляемого процесса, изучение которого является предметом соответствующих наук, ставящих цели управления (например, технических, экономических, биологических, общественных и т. д.).
Необходимо подчеркнуть важность и определяющую роль четкой формулировки цели управления. Нет цели — нет управления! Например, в зависимости от того, какой у предприятия план — по валу или по номенклатуре изделий, будут получены совершенно разные конечные результаты.
Цель управления процессом или объектом — конечный технический или экономический результат, который может быть достигнут системой управления на определенном временном интервале ее нормального функционирования.
Цель управления формулируют не специалисты по управлению, а, например, технологи, инженеры-аэродинамики, экономисты, биологи, т. е. специалисты в той области техники, в которой необходимо применить управление. Основная задача специалистов по управлению состоит в том, чтобы создать систему для сбора информации, необходимой для осуществления цели управления, передачи, представления или преобразования ее в удобную форму, переработки и, наконец, принятия решения о том, как использовать эту информацию, чтобы обеспечить выполнение цели объектом управления. Техническое решение этой задачи связано с применением различных аппаратных и программных средств.
3 Принципы и основы построения систем автоматического регулирования
Теория автоматического регулирования появилась и достигла довольно высокого уровня гораздо раньше, чем теория автоматического управления. Становление и развитие ТАУ потребовало использования современных достижений теории информации, информатики, вычислительной техники.
Однако основные понятия, принципы и методы ТАУ сформировались в ТАР. Поэтому в этом реферате сначала даются основные принципы регулирования САР, потом вводится понятие САУ, а затем рассматривается более сложная проблема — проблема управления.
Рассмотрим ряд технологических процессов, которые характеризуются тем, что в течение продолжительного времени необходимо поддерживать постоянными или изменять по определенному закону некоторые физические величины на выходе соответствующего управляемого объекта (машины, установки, агрегата и т. д.). Эти величины называют регулируемыми переменными (например, частоту вращения вала турбины, температуру и давление на выходе технологической установки, напряжение на клеммах генератора, координаты движущегося объекта и т. д.).
Для технической реализации таких процессов используют специальные устройства, называемые автоматическими регуляторами, которые на основании измерения регулируемых переменных должны оказывать соответствующие управляющие воздействия на объект регулирования.
Целенаправленное изменение поведения объекта во времени может осуществляться по принципу разомкнутого или замкнутого циклов. Рассмотрим два варианта системы автоматического регулирования частоты вращения вала нагруженного электродвигателя (см. рис. 1).


Рис. 1. Схемы САР:
а — система без обратной связи (разомкнутый цикл):
б — с обратной связью (замкнутый цикл)
Система разомкнутого цикла. В системах как разомкнутого (рис. 1, а), так и замкнутого цикла (рис. 1, б) входным управляющим воздействием является перемещение токосъемного элемента (движка 2) потенциометра 1. Последний преобразует это перемещение в напряжение на входе усилителя 3, что приводит к изменению тока в обмотке якоря электродвигателя 4—исполнительного элемента системы. Это в свою очередь вызовет соответствующее изменение угловой скорости вала электродвигателя (Эдв). При идеальных условиях частота вращения вала в установившемся режиме будет однозначно соответствовать заданной уставке — положению движка потенциометра.
Частоту вращения вала можно контролировать при помощи тахогенератора 5 и вольтметра 6, но результаты этого контроля не используют в процессе регулирования.
Рассмотренная схема не имеет замкнутого пути обхода, т. е. является разомкнутой. Для установления соответствия между входом (положением движка 2) и выходом (частотой вращения) система должна быть тщательно отградуирована. Конкретная градуировочная кривая справедлива только при постоянном значении механической нагрузки на валу электродвигателя. При изменении этой нагрузки градуировка нарушается. Кроме того, при износе и старении элементов системы, при колебаниях температуры и т. д. эта градуировка также нарушается. Поэтому системы, работающие по принципу разомкнутого цикла, не могут обеспечить высокую точность регулирования. В них не измеряется результат, вызываемый управляющим воздействием, т. е. перемещением движка, и не осуществляются действия, влияющие на этот результат, с тем чтобы он соответствовал требуемому.
Система замкнутого цикла, принцип обратной связи. Эта система (см. рис. 1, б) отличается от системы разомкнутого цикла тем, что выходное напряжение тахогенератора 5 сравнивается с уставкой на входе, т. е. с напряжением Uп, которое снимается с потенциометра 1. Если угловая скорость электродвигателя отличается от заданной, то возникает сигнал ошибки DU= Uп – Uтг. Усиление сигнала DU по мощности до уровня, необходимого для нормальной работы Эдв, осуществляет усилитель 3. Электродвигатель с встроенным на его валу тахогенератором отрабатывает сигнал ошибки до определенного значения, которое в установившемся режиме и задает частоту вращения вала нагрузки при определенном значении Uп. Значение сигнала ошибки тем меньше, чем больше коэффициент усиления усилителя по напряжению.
Отметим, что модуль и знак сигнала ошибки определяют соответственно угловую скорость и направление вращения вала Эдв, т. е. вала механической нагрузки.
Принцип управления, основанный на использовании ООС, характеризуется тем, что не требует градуировки и сохраняет высокую точность и в тех случаях, когда нагрузка и параметры элементов системы со временем изменяют свои значения. В этом заключается основное достоинство систем с обратной связью.
В некоторых случаях оба принципа управления (по разомкнутому и замкнутому циклам) используют в сочетании друг с другом.
В системах с замкнутым циклом или обратной связью точность регулирования, т. е. точность поддержания требуемой функциональной связи (в частности, пропорциональной) между входом и выходом, в основном зависит от точности, с которой проводят измерение и сравнение требуемого и действительного значений регулируемой переменной.
Системой автоматического регулирования называется активная[1] динамическая система, стремящаяся сохранять в допустимых пределах отклонение между требуемым и действительным изменениями регулируемой переменной при помощи их сравнения на основе принципа обратной связи (замкнутого цикла) и использования получающегося при этом сигнала для управления источником энергии.
САР называются системы с обратной связью (ОС). Это объясняется тем, что в них имеется не только прямая связь между входом (входным управляющим воздействием, или управлением) и выходом (регулируемой переменной), но и обратная между выходом и входом, служащая для сравнения этих величин.
Изменения регулируемых величин вызывают не только управляющие, но и возмущающие воздействия, приложенные в соответствующих точках системы автоматического регулирования. Управление осуществляет целенаправленное изменение регулируемых переменных. Возмущение стремится нарушить требуемую функциональную связь между управляющим воздействием и регулируемой переменной. Например, на рис. 1, б возмущающими воздействиями могут быть момент нагрузки Mн, приложенный к валу электродвигателя, или изменение напряжения Uв в обмотке возбуждения последнего.
САР должна вести себя по отношению к управляющему и возмущающему воздействиям различным образом. Необходимо, чтобы система осуществляла управление с наименьшими погрешностями, компенсируя действие возмущений на регулируемые переменные.
САР с одной регулируемой величиной показана на рис. 2. Цифрой 1 обозначено устройство для сравнения управляющего воздействия с регулируемой переменной; цифрой 2—объект и регулятор. Отметим, что если управляющее воздействие g(t) может быть приложено только к сравнивающему устройству системы, то возмущающее воздействие f(t) может быть приложено к любой точке САР.
Цепь обратной связи

Рис. 2. Схема САР с одной регулируемой переменной
Внешние воздействия на систему приводят к тому, что требуемые и действительные значения регулируемой величины отличаются друг от друга. Разность между необходимым и действительным значением регулируемой величины является ошибкой системы автоматического регулирования.
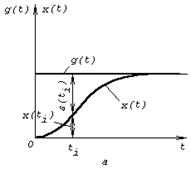
Отклонением регулируемой величины называют разность между значением регулируемой величины в данный момент времени и некоторым фиксированным ее значением, принятым за номинальное или за начало отсчета (рис. 3, а)
 |
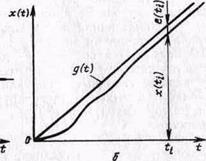
В то время как отклонение х(t) регулируемой величины при неограниченно возрастающих управляющих воздействиях является также неограниченно возрастающей функцией времени, ошибка e(t) остается ограниченной (рис. 3, б). Воздействие, приложенное к сравнивающему элементу системы регулирования, называют входным сигналом, или сигналом на входе системы автоматического регулирования.
При введении отрицательной обратной связи система слабо реагирует на возмущающие воздействия и подчиняется главным образом управляющему воздействию, т. е. замкнутая система регулирования по существу представляет собой фильтр, который достаточно точно воспроизводит управляющее воздействие и подавляет возмущающее.
Сигнал, который поступает с выхода системы на ее вход, называют сигналом главной обратной связи, а разность между входным сигналом и сигналом главной обратной связи — сигналом ошибки.
САР являются системами направленного действия. Это означает, что выходной сигнал последующего элемента может оказать влияние на формирование ошибки на выходе элемента сравнения только через обратную связь.
Итак, САР—это замкнутая активная динамическая система направленного действия, преобразующая уставку на ее входе в регулирующее воздействие, непосредственно прикладываемое к объекту управления.
Похожие работы
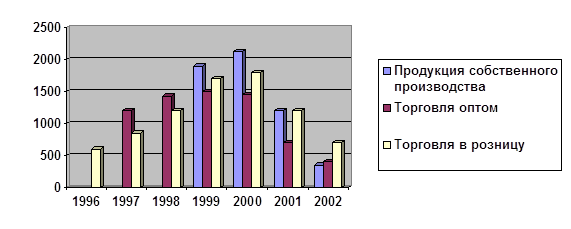
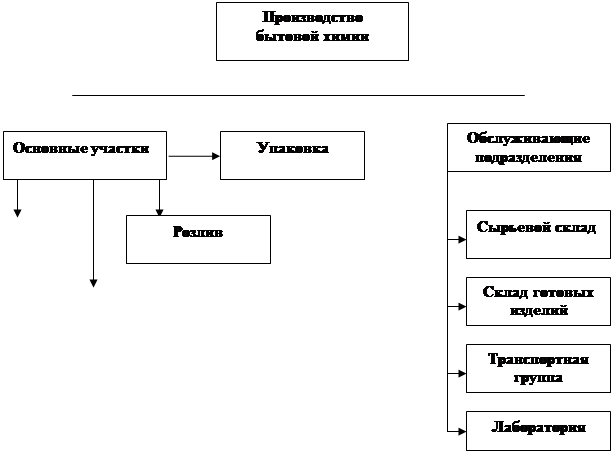
... и отстаивание; разлив; прикручивание пробки; наклеивание этикетки; упаковка и маркировка; хранение и транспортирование. Рис.1 Анализ продаж 2.2. Анализ и совершенствование системы организации и управления 2.2.1. Производственная структура Производственная структура предприятия – состав отделов, служб, их размещение и взаимосвязь, которые обеспечивают рациональное выполнение ...
... механизма координации функциональных и межфункциональных связей по достижению изменяющихся целей—с другой. Особенно важное значение при этом имеет разработка не только организационной структуры, но и организационных процессов управления. ГЛАВА 3. ТИПЫ ОРГАНИЗАЦИОННЫХ СТРУКТУР УПРАВЛЕНИЯ И УСЛОВИЯ ИХ ПРИМЕНЕНИЯ. 3.1. ТИПЫ СИСТЕМ УПРАВЛЕНИЯ (механистические и органические). Весьма важной для ...
... , многие считают, что практика опровергает ее. Они указывают на то, что менеджмент в 80-е годы часто отождествлялся с компаниями, в которых доминировала сильная личность. 5. Реализация принципов управления в современном менеджменте Время, в которое мы живем, - эпоха перемен. Наше общество осуществляет исключительно трудную, во многом противоречивую, но исторически неизбежную и необходимую ...
... БИОРЕАКТОРА Лист 90 Доклад. Уважаемые члены государственной экзаменационной комиссии разрешите представить вашему вниманию дипломный проект на тему: «Система автоматизированного управления процесса стерилизации биореактора» Процесс стерилизации биореактора (или ферментера) является важной стадией процесса биосинтеза антибиотика эритромицина. Суть процесса стерилизации состоит в ...
0 комментариев