Навигация
Самообучающиеся автономные системы
33014
знаков
0
таблиц
5
изображений
3. Самообучающиеся автономные системы
Чем отличается работа, которую выполняют роботы и которую может выполнить человек? Роботы могут обладать качествами, намного превосходящими возможности людей: высокая точностью, сила, реакция, отсутствие усталости. Но вместе с тем они остаются просто инструментами в руках человека. Существует работа, которая может быть выполнена только человеком и которая не может быть выполнена роботами (или необходимо создавать неоправданно сложных роботов). Главное отличие человека от робота – это способность адаптироваться к изменению обстановки. Конечно, практически у всех роботов существует способность работать в нескольких режимах, обрабатывать исключительные ситуации, но все это изначально закладывается в него человеком. Таким образом, главный недостаток роботов – это отсутствие автономности (требуется контроль человека) и отсутствие адаптации к изменению условий (все возможные ситуации закладываются в него в процессе создания). В связи с этим актуальна проблема создания систем, обладающих такими свойствами.
Один из способов создать автономную систему с возможностью адаптации – это наделить её способностью обучаться. При этом в отличие от обычных роботов, создаваемых с заранее просчитанными свойствами, такие системы будут обладать некоторой долей универсальности.
Попытки создания таких систем предпринимались многими исследователями, в том числе и с использованием нейросетей. Один из примеров – созданный в Киевском Институте кибернетики еще в 70-х годах макет транспортного автономного интегрального робота (ТАИР) (см. [6]). Этот робот обучался находить дорогу на некоторой местности и затем мог использоваться как транспортное средство.
Вот какими свойствами, по моему мнению, должны обладать такие системы:
Разработка системы заключается только в построении её архитектуры.
В процессе создания системы разработчик создает только функциональную часть, но не наполняет (или наполняет в минимальных объемах) систему информацией. Основную часть информации система получает в процессе обучения.
Возможность контроля своих действий с последующей коррекцией
Этот принцип говорит о необходимости обратной связи [Действие]-[Результат]-[Коррекция] в системе. Такие цепочки очень широко распространены в сложных биологических организмах и используются на всех уровнях – от контроля мышечных сокращений на самом низком уровне до управления сложными механизмами поведения.
Возможность накопления знаний об объектах рабочей области
Знание об объекте – это способность манипулировать его образом в памяти т.е. количество знаний об объекте определяется не только набором его свойств, но ещё и информацией о его взаимодействии с другими объектами, поведении при различных воздействиях, нахождении в разных состояниях, и т.д., т.е его поведении во внешнем окружении (например, знание о геометрическом объекте предполагает возможность предсказать вид его перспективной проекции при любом повороте и освещении).
Это свойство наделяет систему возможностью абстрагирования от реальных объектов, т.е. возможностью анализировать объект при его отсутствии, тем самым открывая новые возможности в обучении
Автономность системы
При интеграции комплекса действий, которые система способна совершать, с комплексом датчиков, позволяющих контролировать свои действия и внешнюю среду, наделенная вышеприведенными свойствами система будет способна взаимодействовать с внешним миром на довольно сложном уровне, т.е. адекватно реагировать на изменение внешнего окружения (естественно, если это будет заложено в систему на этапе обучения). Способность корректировать свое поведение в зависимости от внешних условий позволит частично или полностью устранить необходимость контроля извне, т.е. система станет автономной.
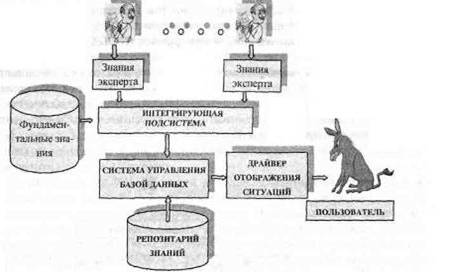
4. Система распознавания речи как самообучающаяся система
С целью изучения особенностей самообучающихся систем модели распознавания и синтеза речи были объединены в одну систему, что позволило наделить её некоторыми свойствами самообучающихся систем. Это объединение является одним из ключевых свойств создаваемой модели. Что послужило причиной этого объединения?
Во-первых, у системы присутствует возможность совершать действия (синтез) и анализировать их (распознавание), т.е. свойство (2). Во-вторых, присутствует свойство (1), так как при разработке в систему не закладывается никакая информация, и возможность распознавания и синтеза звуков речи – это результат обучения.
Преимуществом полученной модели является возможность автоматического обучения синтезу. Механизм этого обучения описывается далее.
Ещё одной очень важной особенностью является возможность перевода запоминаемых образов в новое параметрическое пространство с гораздо меньшей размерностью. Эта особенность на данный момент в разрабатываемой системе не реализована и на практике не проверена, но тем не менее я постараюсь кратко изложить её суть на примере распознавания речи.
Предположим, входной сигнал задается вектором первичных признаков в N-мерном пространстве. Для хранения такого сигнала необходимо N элементов. При этом на этапе разработки мы не знаем специфики сигнала или она настолько сложна, что учесть её затруднительно. Это приводит к тому, что представление сигнала, которое мы используем, избыточно. Далее предположим, что у нас есть возможность синтезировать такие же сигналы (т.е. синтезировать речь), но при этом синтезируемый сигнал является функцией вектора параметров в M-мерном пространстве, и M<<N (действительно, число параметров модели синтеза речи намного меньше числа первичных признаков модели распознавания речи). Но тогда мы можем запоминать входной сигнал не по его первичным признакам в N-мерном пространстве, а по параметрам модели синтеза в M-мерном пространстве. Возникает вопрос: а как переводить сигнал из одного параметрического пространства в другое? Есть все основания предполагать, что это преобразование можно осуществить при помощи довольно простой нейросети. Более того, по моему мнению, такой механизм запоминания работает в реальных биологических системах, в частности, у человека.
Похожие работы
... задач за счет применения средств автоматизации, снижение затрат за счет сокращения штата сотрудников, привлекаемых к делопроизводству, поиску и сортировке управленческой документации за счет внедрения электронного документооборота и т.д.) Результаты второго рода могут быть измерены с помощью экономических показателей, находящихся в бухгалтерской отчетности. Доход третьего рода получают за счет ...

... уровня. В общем случае в качестве вариантов решений можно использовать классы стратегий, предлагаемых в экономической литературе. 16. Особенности проектирования интеллектуальной экономической информационной системы Проектирование ИИС начинается с обследования предметной области. Современные технологии такого обследования базируются на концепции и программных средствах реинжиниринга бизнес- ...
... МП к некритическому экстраполированию результата считается его слабостью. Сети РБФ более чувствительны к «проклятию размерности» и испытывают значительные трудности, когда число входов велико. 5. МОДЕЛИРОВАНИЕ НЕЙРОННЫХ СЕТЕЙ ДЛЯ ПРОГНОЗИРОВАНИЯ СТОИМОСТИ НЕДВИЖИМОСТИ 5.1 Особенности нейросетевого прогнозирования в задаче оценки стоимости недвижимости Использование нейронных сетей можно ...
... информацию, находить в ней закономерности, производить прогнозирование и т.д. В этой области приложений самым лучшим образом зарекомендовали себя так называемые нейронные сети – самообучающиеся системы, имитирующие деятельность человеческого мозга. Область науки, занимающаяся построением и исследованием нейронных сетей, находится на стыке нейробиологии, математики, электроники и программирования ...
0 комментариев