Навигация
Блок формирователей сигналов МАИ и СЕВЕР
50593
знака
2
таблицы
31
изображение
3.7 Блок формирователей сигналов МАИ и СЕВЕР
К одним из требований, предъявляемых к разрабатываемому устройству, является формирование сигналов специальной формы и имеющих определенную временную расстановку смотри рисунок 3. В перечисленных выше режимах, кроме режима ИМИТИТОР, сигналы МАИ и СЕВЕР должны формироваться только по фронту приходящих с оптических датчиков импульсов U Ав и UR, причем, как видно из рисунков 3 и 6, сигнал СЕВЕР должен формироваться до прихода импульса UR, создавая, таким образом, ситуацию, при которой создание первого импульса СЕВЕР оказывается невозможным, в связи с неизвестностью априорных данных о количестве импульсов U Ав.
Поэтому при разработке блока формирователя сигналов было сделано следующее. При переключении режима работы и появлении сигнала включения питания датчика 1, процесс формирования импульсов начинается не сразу, а по прошествии первого импульса UR. Причем, при возникновении неисправности оптического датчика и появлении сигнала UR позже 4096-ти импульсов UAB, сигнал СЕВЕР будем формировать точно на 4096-ом импульсе, так как этого требуют другие устройства, входящие в аппаратуру локатора. Кроме этого, при возникновении ситуации, когда импульс UR появляется раньше требуемого, процесс формирования СЕВЕРА прерывается до появления следующего сигнала UR. Структурная схема формирователя представлена на рисунке 19, временные диаграммы работы блока с числом импульсов UАВ > 4096 и с UАВ < 4096 приведены на рисунках 20 и 21 соответственно.

Рисунок 19 - Структурная схема работы формирователя импульсов МАИ и СЕВЕР
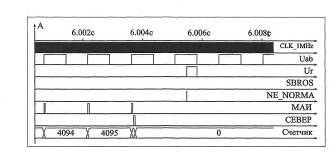
Рисунок 20 - Временные диаграммы работы блока формирователя, где число UАВ > 4096

Рисунок 21 - Временные диаграммы работы блока формирователя, где число UАв < 4096
3.8 Блок IMITATOR
Для формирования сигналов специальной формы (смотри рисунок 4), с параметрами, не зависящими от входных импульсов UАВ и UR, в графическом редакторе системы MAX+plus [2] был разработан блок IMITATOR, позволяющий по импульсам синхронизации осуществить создание вышеуказанных сигналов с высокой точностью. Формирование длительности и временного расположения импульсов МАИ и СЕВЕР аналогичны разработанному выше блоку формирователя сигналов. Так как поворот антенны осуществляется за 6с, а число импульсов, идущих с оптических датчиков, равно 4096-и, необходимый период следования равен: ТМАИ =![]() =1.46 мс (смотри рисунок 4). За его создание отвечает дополнительный 11-и разрядный счетчик синхроимпульсов частотой 1 МГц, идущих из блока формирования тактового синхросигнала (смотри рисунки 5 и 6)
=1.46 мс (смотри рисунок 4). За его создание отвечает дополнительный 11-и разрядный счетчик синхроимпульсов частотой 1 МГц, идущих из блока формирования тактового синхросигнала (смотри рисунки 5 и 6)
Функциональная схема блока имитатора представлена на рисунке 22. Блоки SBROS 11_i, SBROS _13_i создают сигналы сброса SBROS _11 и SBROS 13 для счетчиков, формирующих период следования импульсов МАИ и принимающих участие в формировании сигнала СЕВЕР. Длительность же вышеуказанных импульсов контролируется с помощью блоков SBROS_7_i_1, SBROS 7_i_2, SBROS 7_ i_3, представляющих собой, написанную на языке AHDL программу [1], реализующую создание стробов, защелкивающих 3-и JK триггера для последующего создания необходимой длительности.
Функционирование блока происходит под воздействием внешнего сигнала управления (разрешения работы), называемого ENA смотри рисунок 22. Так как переключения режимов работы устройства могут вызвать искажения формы создаваемых блоком имитатора сигналов FORM _MAI, FORM _ SEVER, действие сигнала ENA осуществляется только при одновременном отсутствии вышеуказанных сигналов, что обеспечивается при помощи дополнительного JK триггера, формирующего импульс управления Z.
3.9 Режимы работы устройства
Согласно ТЗ на разрабатываемое устройство, помимо режима WORK, когда работа схемы осуществляется с первым датчиком, а второй включается только при возникновении сигнала АВАРИИ, необходимо реализовать еще 2-а режима работы:
- Режим ЮСТИРОВКА,
- Режим ИМИТАТОР.
Режим ЮСТИРОВКА должен приводится в действие внешними органами управления, и обеспечивать одновременное включение питания обоих оптических датчиков с передачей формируемых сигналов МАИ1, СЕВЕР 1, МАИ 2 и СЕВЕР 2 на соответствующие комплекты аппаратуры сопряжения, передачи данных и первичной обработки информации. Внешний сигнал управления ЮСТИРОВКА предназначен для настройки и калибровки оптических датчиков антенны, так как параметры формируемых ими сигналов должны иметь как можно меньше расхождений, при возникновении которых в работе схемы разрабатываемого устройства и другой аппаратуры могут возникнуть значительные ошибки, наличие которых недопустимо.
Режим ИМИТАТОР должен приводиться в действие с помощью внешних сигналов управления ИМИТАТОР 1-й КОМПЛЕКТ и ИМИТАТОР 2-й КОМПЛЕКТ, действие на схему которых отличается друг от друга следующими результатами:
При включении режима ИМИТАТОР 1-й КОМПЛЕКТ и одновременном наличии на входе устройства управляющего сигнала РАБОТА ПРИВОДА 1 антенны локатора на соответствующий комплект аппаратуры сопряжения передачи данных и первичной обработки информации должны передаваться импульсы, сформированные от встроенного в схему устройства имитатора, а на другой комплект - от выбранного в работу, согласно режиму WORK, оптического датчика.
При включении режима ИМИТАТОР 2-й КОМПЛЕКТ и одновременном наличии на входе устройства управляющего сигнала РАБОТА ПРИВОДА 2 антенны локатора на соответствующий комплект аппаратуры сопряжения передачи данных и первичной обработки информации должны передаваться импульсы, сформированные от встроенного в схему устройства имитатора, а на другой комплект - от выбранного в работу, согласно режиму WORK, оптического датчика.
При включении режимов ИМИТАТОР 1-й КОМПЛЕКТ и ИМИТАТОР 2-й КОМПЛЕКТ одновременно или при совместном наличии управляющих сигналов аварий РАБОТА ПРИВОДА 1 и РАБОТА ПРИВОДА 2, на первый и второй комплекты аппаратуры сопряжения, передачи данных и первичной обработки информации должны передаваться импульсы, сформированные от встроенного имитатора.
Режим включения имитатора позволяет проверить работу различных узлов аппаратуры радиолокатора без включения привода антенны, что может стать очень важным при поиске возникших неисправностей в соединительных блоках аппаратуры во время ее установки, или в режиме эксплуатации.
Так как пульт управления радиолокатором находится, как внутри него, так и в контрольно диспетчерском пункте, то для удобства проверки устройства и используемых им оптических датчиков мною к вышеперечисленным внешним сигналам управления были добавлен еще 4-е сигнала. Эти сигналы позволяют обслуживающему персоналу проверить, по необходимости, разработанное мною устройство и вышеуказанные датчики без применения какой - либо дополнительной аппаратуры.
Сигнал MU - местное управление. Является главным сигналом управления и позволяет включить режим проверки схемы и датчиков. Включение данного режима без использования нижеуказанных сигналов игнорируется и происходит нормальная работа схемы в выбранном режиме.
Сигнал управления MU_D1 вместе с включением режима MU позволяет включить в работу первый оптический датчик, игнорируя наличие каких - либо неисправности в его работе.
Сигнал управления MU D2 вместе с включением режима MXJ позволяет включить в работу второй оптический датчик, игнорируя наличие каких - либо неисправности в его работе.
Сигнал управления MU _ IM вместе с включением режима MU позволяет включить имитатор.
Таким образом, добавленный режим работы позволяет еще более точно находить место возникшей неисправности и исправлять ее, используя вышеуказанные 3-й сигнала управления.
Для нормальной работы всей схемы с вышеуказанными сигналами, мною были дополнительно разработаны два блока управления М __ PITANIE и SIGNALS.
З.10 Блок M_PITANIE
Блок М _ PITANIE представляет собой, написанную на языке описания цифровых схем [1], программу, осуществляющую формирование сигналов включения и выключения питания двух оптических датчиков под воздействием внешних и внутренних сигналов управления. Программа организована из многочисленных проверок тех или иных условий, возникающих во время функционирования схемы устройства, и содержит иерархическую структуру. Алгоритм работы блока М _ PITANIE показан на рисунке 23 и 24. Кроме формирования вышеуказанных сигналов управления, в работу данного объекта входит передача сигналов UАВ и UR для первого и второго датчика на блоки формирователей, путем совмещения их операцией И со сформированными сигналами. Временные диаграммы работы блока М _ PITANIE показаны на рисунках 25 и 26, на которых изображена работа схемы в различных режимах (все сигналы управления, кроме МУ, имеют активный низкий уровень).

Рисунок 25 - Временные диаграммы работы модуля М _ PITANIE
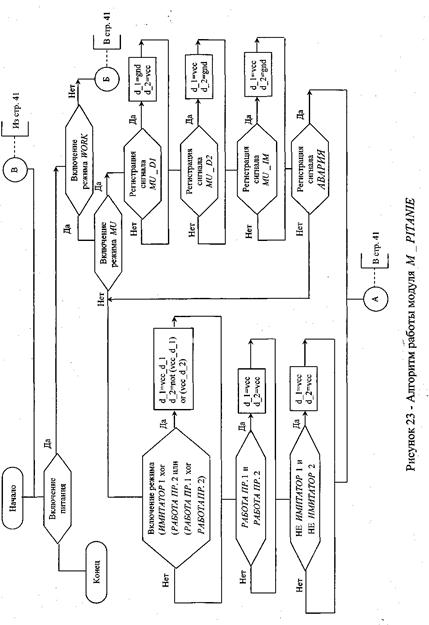


Рисунок 26 - Временные диаграммы работы модуля М_PITANIE
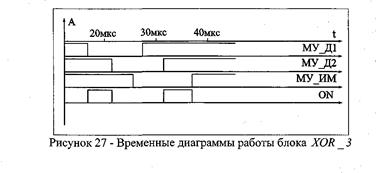
Как видно из рисунка 25, формирование сигналов VCC_DATCHIK_1 и VCC DATCHIK_2, при функционировании схемы в режиме МУ, во время совместного действия любых 2-х управляющих сигналов МУ _ Д1, МУ _ Д2 или МУ_ИМ, происходит согласно требованиям к режиму РАБОТА, так как устройство выходит из режима местного управления. Это связано с тем, что выполнение вышеуказанного условия, и создания данного режима работы потребовало бы наличия дополнительных сигналов управления, что повлекло бы к возникновению дополнительных трудностей при работе с устройством, что является недопустимым. Поэтому для исключения этой возможности была создана небольшая программа, выполняющая функции обычного элемента XOR (исключающее ИЛИ), и формирующая сигнал разрешения включения режима МУ, работа которой демонстрируется на рисунке 27, где ON- сигнал разрешения, с активным высоким уровнем.
Похожие работы
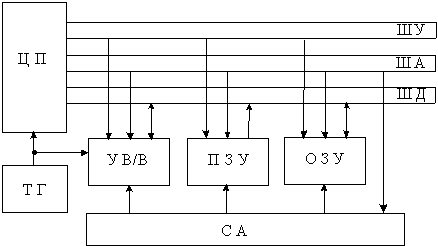
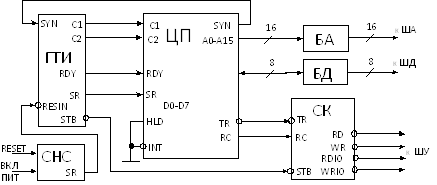
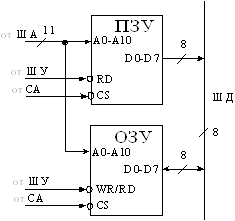
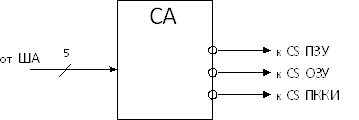
... ОЗУ – оперативное запоминающее устройство; СА – селектор адреса; ШУ – шина управления; ША – шина адреса; ШД – шина данных Рисунок 1 – Структурная схема микропроцессорного устройства Основным узлом разрабатываемого устройства отображения информации является ЦП. В его функции входит управление всеми остальными узлами устройства. Отдельные блоки соединяются между собой линиями, объединяемыми по ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
... ( пока нужный сектор данных не окажется под головкой чтения/записи) составляет 13 мс против 8-15 мс для НЖМД. WORM системы используют довольно мощный лазер для записи информации. С помощью лазера WORM-устройства обрабатывают поверхность диска для изменения отражающей способности определённых участков диска или для удаления ямок с его поверхности (это достигается за счёт изменения поверхностного ...


... повышения надежности эксплуатации погружного оборудования, получения информации обоснованых параметров скважины, снижения эксплуатационных затрат за счет исключения сложных аварий 5.4 Подбор оптимального режима скважин эксплуатируемых установками ЭЦН и ТМС на Хохряковском месторождении. 1) Перевод на другой вид эксплуатации. Для УЭЦН: 1) Изменением типоразмера УЭЦН. 2) Заглублением ...
0 комментариев