Навигация
3.4 Блок PR_SEVER_1
Работа модуля MAI _1 была бы невозможна без специально написанного дополнительного блока PR_SEVER_1, осуществляющего пропуск первого импульса UR, по переключению схемы из одного режима работы в другой смотри рисунок 15.
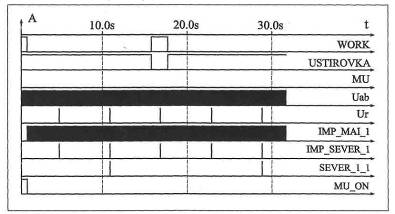
Рисунок 15 - Временные диаграммы работы блока PR_SEVER_1
Как видно из рисунка 15, сигналы переключения режимов WORK-USTIROVKA приводят к сбросу формирователя последовательности SEVER_1_1, организованного на триггерах d1 _1 и d2 _1. На синхронизирующие входы, которых поданы сигналы U R, и не-U R соответственно. Сброс триггеров осуществляется подачей на их входы CLRN сигналов управления - WORK и USTIROVKA.
При работе схемы в режиме не-WORK последовательность импульсов SEVER _1 _1 полностью совпадает с последовательностью UR
Сигнал MU_ON предназначен для передачи информации о необходимости работы первого датчика в блок MAI _1 и SEVER _1. Как видно из рисунка 15, во время включения режима USTIROVKA, сопровождающегося выключением режима WORK, сигнал разрешение работы первого датчика не отключается, что связано с необходимостью работы в этом режиме обоих датчиков. Сигналы IMP_MAI__1 и IMP SEVER _1 сформированы под воздействием внешних управляющих сигналов, указанных выше и являются копиями последовательностей сигналов UАВ и UR.
3.5 Блок DATCHIK_1
Структурная схема блока DATCHIK _1 представлена на рисунке 16.
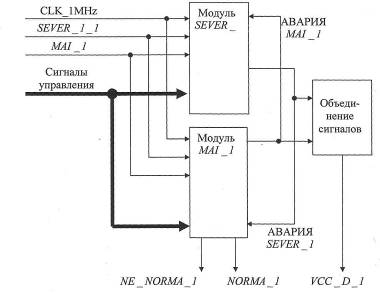
Рисунок 16 - Структурная схема работы блока DATCHIK _1
Данный блок предназначен для работы с модулями MAI _ 1 и SEVER _ 1 и осуществляет передачу управляющих сигналов из одного модуля в другой, создавая, таким образом, возможность выключения модуля при появлении в другом - внутреннего сигнала аварии. Режим передачи внутренних сигналов состояния осуществляется при помощи сигналов VCC _ SEVER_1 и VCC_МAI _1 для модулей MAI и SEVER соответственно. Результатом работы блока DATCHIK_1 являются сформированные сигналы VCC__D_1, NORMA _1 и NE _ NORMA __ 1, назначение которых приведено ниже:
-VCC_D_1 несет в себе информацию о результате работы модулей MAI_ 1 и SEVER _ 1. (Сигнал с активным низким уровнем).
-NORMA _1 - строб импульс, показывающий, что при повороте антенны локатора на 360°, число импульсов UАв первого оптического датчика соответствует 4096-ти.
-NE _NORMA _1 - строб импульс, показывающий, что при повороте антенны локатора на 360°, число импульсов UАВ первого оптического датчика отклонилось от номинального значения на допустимую величину.
3.6 Функции управления резервным оптическим датчиком
Организация работы второго оптического датчика построим по аналогичной с первым датчиком схеме. Контроль входных сигналов UАВ и UR, идущих с резервного оптического датчика, возложим на модули MAI _2,
SEVER _ 2 и блок управления DATCHIK _2. Режим работы блока
PR _ SEVER 2 создадим отличным от PR _ SEVER _1, так как второй датчик в режиме WORK, при нормальном функционировании первого, должен быть отключен. Для этого, помимо вышеуказанных сигналов, характерных PR SEVER 1, введем дополнительный входной сигнал VCC __DATCHIK _1, идущий с блока DATCHIK_1 и осуществляющий разрешение формирование последовательностей IMP _МА1 _2 и IMP _ SEVER _ 2 по импульсам идущим со второго оптического датчика.
Таким образом, при одновременной работе PR _SEVER _1, DATCHIK _1 и PR SEVER_2, DATCHIK _2 в режиме WORK осуществляется работа с первым датчиком, а при возникновении неисправности (формирование сигналов АВАРИЯ модулями MAI _1 или SEVER _1), происходит автоматическое
переключение на работу и прием сигналов от резервного датчика. При возникновении ошибок в работе второго датчика (формирование сигналов АВАРИЯ модулями MAI_2 или SEVER 2) происходит формирование общего сигнала АВАРИЯ и работа схемы останавливается.
При переключении режима работы схемы с WORK на USTIROVKA или на MU вышеуказанными модулями происходит автоматическая установка внутренних сигналов управления оптическими датчиками в положение, соответствующее включенному состоянию и осуществляется выключение схем контроля за параметрами принимаемых импульсов.
Структурная схема совместной работы блоков DATCHIK _ 1 и
DATCHIK_2 приведена на рисунке 17. Как видно из рисунка 17, в режиме WORK, сигнал управления включением питания второго оптического датчика является обратным по отношению к сигналу, осуществляющему управление питанием первого оптического датчика. Таким образом, работа второго оптического датчика запрещена до момента возникновения аварии в первом.
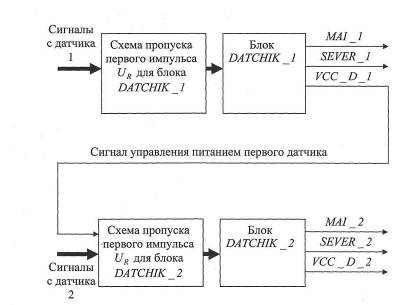
Рисунок 17 - Структурная схема совместной работы блоков DATCHIK_1 и DATCHIK_2
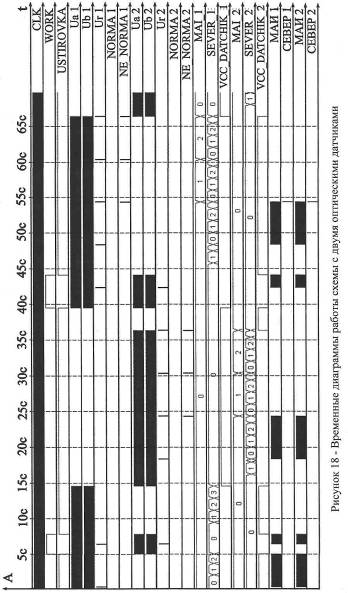
Временные диаграммы работы вышеуказанных блоков вместе приведены на рисунке 18, где MAI _1, SEVER _1 иллюстрируют работу счетчиков схем контроля импульсов первого датчика, a MAI_2, SEVER_2 - для второго. (Для наглядности частота синхронизации увеличена в двадцать пять раз).
Похожие работы
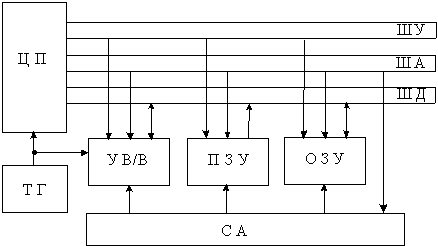
... ОЗУ – оперативное запоминающее устройство; СА – селектор адреса; ШУ – шина управления; ША – шина адреса; ШД – шина данных Рисунок 1 – Структурная схема микропроцессорного устройства Основным узлом разрабатываемого устройства отображения информации является ЦП. В его функции входит управление всеми остальными узлами устройства. Отдельные блоки соединяются между собой линиями, объединяемыми по ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
... ( пока нужный сектор данных не окажется под головкой чтения/записи) составляет 13 мс против 8-15 мс для НЖМД. WORM системы используют довольно мощный лазер для записи информации. С помощью лазера WORM-устройства обрабатывают поверхность диска для изменения отражающей способности определённых участков диска или для удаления ямок с его поверхности (это достигается за счёт изменения поверхностного ...


... повышения надежности эксплуатации погружного оборудования, получения информации обоснованых параметров скважины, снижения эксплуатационных затрат за счет исключения сложных аварий 5.4 Подбор оптимального режима скважин эксплуатируемых установками ЭЦН и ТМС на Хохряковском месторождении. 1) Перевод на другой вид эксплуатации. Для УЭЦН: 1) Изменением типоразмера УЭЦН. 2) Заглублением ...
0 комментариев