Навигация
Решение дифференциального уравнения интерполяционным методом Адамса
14666
знаков
0
таблиц
17
изображений
3 Решение дифференциального уравнения интерполяционным методом Адамса
![]()
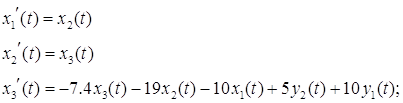
Так как ДУ заданной системы имеет третий порядок, то его необходимо свести к системе уравнений, каждое из которых должно иметь первый порядок, т.е. имеет место нормальная форма Коши:
![]()
Запишем нормальную форму Коши в следующем виде:
![]()
Приведём уравнение к нормальной форме Коши:

![]()

Интерполяционный метод Адамса 3:
![]() , точность
, точность ![]()
Для того, чтобы использовать этот неявный метод, нужно знать ![]()
Получим ![]() методом Эйлера:
методом Эйлера: ![]() точность
точность ![]()
Для получения точности ![]() на первом шаге, возьмем
на первом шаге, возьмем ![]()
Текст программы находится в приложении 2.
Результаты работы программы при h равных 0.5, 0.2, 0.01 приведены на рис. 9.

Рис. 9. Отклики на единичное ступенчатое воздействие
4 Синтез
Введем в прямую цепь ПИД регулятор, а в обратную ПД.
Вид скорректированной системы приведен на рис. 10.

Рис.10. Структурная схема скорректированной системы
![]()
Найдем передаточную функцию системы
Передаточная функция разомкнутой цепи имеет вид:

Передаточная функция разомкнутой цепи имеет вид:

Для решения задачи синтеза необходимо найти параметра регулятора, при которых реальный выходной сигнал, являющийся реакцией на единичное ступенчатое воздействие, будет близок к заданному эталонному сигналу.
В качестве эталонного выходного сигнала используем следующий сигнал:
![]() ,
,
Коэффициент находим по следующей формуле:

Найдем параметры регулятора методом квадратичной аппроксимации.
Рабочая формула метода имеет вид:
![]()
Где,
 градиент функции.
градиент функции.
 матрица Гессе функции
матрица Гессе функции ![]()
![]() находим с помощью метода Золотого сечения.
находим с помощью метода Золотого сечения.
Текст программы находится в приложении 3.
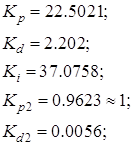
Результат работы программы приведен на рис. 11.

Рис. 11. Пример получения коэффициентов регулятора.
Переходная функция скорректированной системы изображена на рис. 12.
Время управления скорректированной системы исходя из графика примерно равно 2.4с.
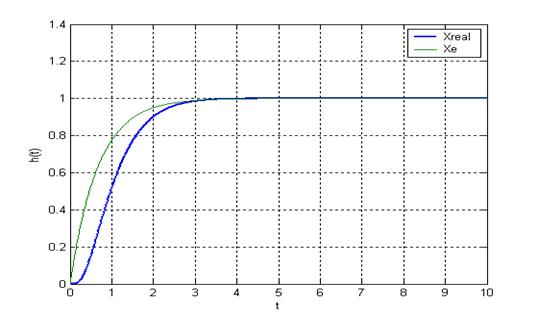
Рис. 12. Сравнение эталонной и реальной переходных функций
Вывод
В данной курсовой работе был синтезирован регулятор САУ, найдены его параметры численным методом. Также было решено дифференциальное уравнение неявным численным методом.
Список литературы
1. Методы классической и современной теории автоматического управления: Учебник в 5-ти т.; 2-е изд., перераб. и доп. Т.3: Синтез регуляторов систем автоматического управления / Под редакцией К.А. Пупкова и Н.Д. Егупова. – М.: Издательство МГТУ им. Н.Э. Баумана, 2004. – 616с.; ил.
2. Н.Д. Егупов, Ю.П. Корнюшин, Ю.И. Мышляев. Учебное пособие по выполнению курсового проектирования по дисциплине «Системы аналитических вычислений» для студентов специальности 160403 «Системы управления летательными аппаратами»
Приложение 1
Метод градиентов
function M_Gradientov
clc
% Решим уравнение s^3+7,4*s^2+19*s+10=0
e=10^-4;
s=0;
A1=1;
A2=7.4;
A3=19;
A4=10;
r0=1;
i=0; %количество итераций
while abs(r0)>e
i=i+1;
s0=s;
r0=A1*s^3+A2*s^2+A3*s+A4; %невязка
Ar=(A1+A2+A3)*r0;
AAr=(A1^2+A2^2+A3^3)*r0;
m=r0*AAr/AAr^2;
s=s0-m*Ar;
end
S1=s; % Нашли вешественный корень
Теперь решаем уранение: A1*s^2+(A2+A1*S1)*s+(A3+A2*S1+A1*s^2)=0
% Корни комплексные
D=(A2+A1*S1)^2-4*A1*(A3+A2*S1+A1*s^2);
S2=(-(A2+A1*S1)+sqrt(D))/2*A1;
S3=(-(A2+A1*S1)-sqrt(D))/2*A1;
disp(S1);
disp(S2);
disp(S3);
disp('Количество итераций'); disp(i);
Приложение 2
Интерполяционный метод Адамса
function Int_Adams_3
clc
%время переходного процесса
T=10;
%-----------------%
%матрица А (X'=AX+BY)
A=[0 1 0;
0 0 1;
-10 -19 -7.4];
%матрица B
B=[0 5 10]';
Y=[0 0 1]';
k=1;
%начальные условия
X(1,1:3)=[0 0 0];
I=[1 0 0; 0 1 0; 0 0 1];
while(k<=3)
%шаг
if(k==1) h=0.1; end;
if(k==2) h=1; end;
if(k==3) h=0.01; end;
%---------------------------%
n=1;
F(1,1:3)=(A*(X(1,1:3))'+B.*Y)';
X(n+1,1:3)=(X(n,1:3)'+h/10*(F(n,1:3))')';% Метод Эйлера
n=n+1;
while (n<=T/h)
F(n,1:3)=(A*(X(n,1:3))'+B.*Y)';
X(n+1,1:3)=(((I-5*h/12*A)^-1)*(X(n,1:3)'+h/12*(5*B.*Y+8*(F(n,1:3))'-(F(n-1,1:3))')))';
n=n+1;
end
t=0:h:10;
%k=t/h+1;
i=1;
while(i<=n)
if(k==1) t1=t; x1(i)=X(i,1); Xa1=1-0.9202*exp(-0.6983*t)-0.4636*exp(-3.3508*t).*cos(1.7584*t+4.382)+0.2433*exp(-3.3508*t).*sin(1.7584*t+4.382); end;
if(k==2) t2=t; x2(i)=X(i,1); Xa2=1-0.9202*exp(-0.6983*t)-0.4636*exp(-3.3508*t).*cos(1.7584*t+4.382)+0.2433*exp(-3.3508*t).*sin(1.7584*t+4.382); end;
if(k==3) t3=t; x3(i)=X(i,1); Xa3=1-0.9202*exp(-0.6983*t)-0.4636*exp(-3.3508*t).*cos(1.7584*t+4.382)+0.2433*exp(-3.3508*t).*sin(1.7584*t+4.382);
end;
i=i+1;
end
k=k+1;
end
t=0:0.01:10;
Xa=1-0.9202*exp(-0.6983*t)-0.4636*exp(-3.3508*t).*cos(1.7584*t+4.382)+0.2433*exp(-3.3508*t).*sin(1.7584*t+4.382);
plot(t,Xa,t1,x1,t1,(Xa1-x1),t2,x2,t2,(Xa2-x2),t3,x3,t3,(Xa3-x3)),grid on
Приложение3
Оптимизация методом квадратичной аппроксимации
function minK
%зададим точность и шаг
eps=0.1;
h=0.1;
%определим матрицу K=[Kp,Kd,Ki,Kp2,Kd2]';
T=4;
K0=[26 6 50 1 0.2]';
%Найдем J0
J0=Xr5(26, 6, 50, 1 ,0.2,T);
%------------------------
%Ищем матрицу G
a=Xr5(K0(1),K0(2),K0(3),K0(4),K0(5),T);
g11=(Xr5(K0(1)+2*h,K0(2),K0(3),K0(4),K0(5),T)-2*Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5),T)+a)/h^2;
g12=(Xr5(K0(1)+h,K0(2)+h,K0(3),K0(4),K0(5),T)-Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5),T)+a)/h^2;
g21=g12;
g13=(Xr5(K0(1)+h,K0(2),K0(3)+h,K0(4),K0(5),T)-Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5),T)+a)/h^2;
g31=g13;
g14=(Xr5(K0(1)+h,K0(2),K0(3),K0(4)+h,K0(5),T)-Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5),T)+a)/h^2;
g41=g14;
g15=(Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5)+h,T)-Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+h,T)+a)/h^2;
g51=g15;
g22=(Xr5(K0(1),K0(2)+2*h,K0(3),K0(4),K0(5),T)-2*Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5),T)+a)/h^2;
g23=(Xr5(K0(1),K0(2)+h,K0(3)+h,K0(4),K0(5),T)-Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5),T)+a)/h^2;
g32=g23;
g24=(Xr5(K0(1),K0(2)+h,K0(3),K0(4)+h,K0(5),T)-Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5),T)+a)/h^2;
g42=g24;
g25=(Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5)+h,T)-Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+h,T)+a)/h^2;
g52=g25;
g33=(Xr5(K0(1),K0(2),K0(3)+2*h,K0(4),K0(5),T)-2*Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5),T)+a)/h^2;
g34=(Xr5(K0(1),K0(2),K0(3)+h,K0(4)+h,K0(5),T)-Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5),T)+a)/h^2;
g43=g34;
g35=(Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5)+h,T)-Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+h,T)+a)/h^2;
g53=g35;
g44=(Xr5(K0(1),K0(2),K0(3),K0(4)+2*h,K0(5),T)-2*Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5),T)+a)/h^2;
g45=(Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5)+h,T)-Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5),T)-Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+h,T)+a)/h^2;
g54=g45;
g55=(Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+2*h,T)-2*Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+h,T)+a)/h^2;
G=[g11, g12, g13, g14, g15; g21, g22, g23, g24, g25; g31, g32 ,g33, g34, g35; g41, g42 ,g43, g44, g45; g51, g52 ,g53, g54, g55;];
%G1=G.^-1;
G1=inv(G);
%построим градиент
gr1=(Xr5(K0(1)+h,K0(2),K0(3),K0(4),K0(5), T)-a)/h;
gr2=(Xr5(K0(1),K0(2)+h,K0(3),K0(4),K0(5), T)-a)/h;
gr3=(Xr5(K0(1),K0(2),K0(3)+h,K0(4),K0(5), T)-a)/h;
gr4=(Xr5(K0(1),K0(2),K0(3),K0(4)+h,K0(5), T)-a)/h;
gr5=(Xr5(K0(1),K0(2),K0(3),K0(4),K0(5)+h, T)-a)/h;
grad=[gr1 gr2 gr3 gr4 gr5]';
L=lambdamin(K0,G1,grad);
K=K0+L*G1*grad;
G10=G1;
grad0=grad;
J=Xr5(K(1),K(2),K(3),K(4),K(5),T);
% квадратичная аппроксимация: X(i+1)=X(i)-L(i)G^-1(i)GRAD(x(i))
while (J0>J)
J0=J;
%Ищем матрицу G
a=Xr5(K(1),K(2),K(3),K(4),K(5),T);
g11=(Xr5(K(1)+2*h,K(2),K(3),K(4),K(5),T)-2*Xr5(K(1)+h,K(2),K(3),K(4),K(5),T)+a)/h^2;
g12=(Xr5(K(1)+h,K(2)+h,K(3),K(4),K(5),T)-Xr5(K(1)+h,K(2),K(3),K(4),K(5),T)-Xr5(K(1),K(2)+h,K(3),K(4),K(5),T)+a)/h^2;
g21=g12;
g13=(Xr5(K(1)+h,K(2),K(3)+h,K(4),K(5),T)-Xr5(K(1)+h,K(2),K(3),K(4),K(5),T)-Xr5(K(1),K(2),K(3)+h,K(4),K(5),T)+a)/h^2;
g31=g13;
g14=(Xr5(K(1)+h,K(2),K(3),K(4)+h,K(5),T)-Xr5(K(1)+h,K(2),K(3),K(4),K(5),T)-Xr5(K(1),K(2),K(3),K(4)+h,K(5),T)+a)/h^2;
g41=g14;
g15=(Xr5(K(1)+h,K(2),K(3),K(4),K(5)+h,T)-Xr5(K(1)+h,K(2),K(3),K(4),K(5),T)-Xr5(K(1),K(2),K(3),K(4),K(5)+h,T)+a)/h^2;
g51=g15;
g22=(Xr5(K(1),K(2)+2*h,K(3),K(4),K(5),T)-2*Xr5(K(1),K(2)+h,K(3),K(4),K(5),T)+a)/h^2;
g23=(Xr5(K(1),K(2)+h,K(3)+h,K(4),K(5),T)-Xr5(K(1),K(2)+h,K(3),K(4),K(5),T)-Xr5(K(1),K(2),K(3)+h,K(4),K(5),T)+a)/h^2;
g32=g23;
g24=(Xr5(K(1),K(2)+h,K(3),K(4)+h,K(5),T)-Xr5(K(1),K(2)+h,K(3),K(4),K(5),T)-Xr5(K(1),K(2),K(3),K(4)+h,K(5),T)+a)/h^2;
g42=g24;
g25=(Xr5(K(1),K(2)+h,K(3),K(4),K(5)+h,T)-Xr5(K(1),K(2)+h,K(3),K(4),K(5),T)-Xr5(K(1),K(2),K(3),K(4),K(5)+h,T)+a)/h^2;
g52=g25;
g33=(Xr5(K(1),K(2),K(3)+2*h,K(4),K(5),T)-2*Xr5(K(1),K(2),K(3)+h,K(4),K(5),T)+a)/h^2;
g34=(Xr5(K(1),K(2),K(3)+h,K(4)+h,K(5),T)-Xr5(K(1),K(2),K(3)+h,K(4),K(5),T)-Xr5(K(1),K(2),K(3),K(4)+h,K(5),T)+a)/h^2;
g43=g34;
g35=(Xr5(K(1),K(2),K(3)+h,K(4),K(5)+h,T)-Xr5(K(1),K(2),K(3)+h,K(4),K(5),T)-Xr5(K(1),K(2),K(3),K(4),K(5)+h,T)+a)/h^2;
g53=g35;
g44=(Xr5(K(1),K(2),K(3),K(4)+2*h,K(5),T)-2*Xr5(K(1),K(2),K(3),K(4)+h,K(5),T)+a)/h^2;
g45=(Xr5(K(1),K(2),K(3),K(4)+h,K(5)+h,T)-Xr5(K(1),K(2),K(3),K(4)+h,K(5),T)-Xr5(K(1),K(2),K(3),K(4),K(5)+h,T)+a)/h^2;
g54=g45;
g55=(Xr5(K(1),K(2),K(3),K(4),K(5)+2*h,T)-2*Xr5(K(1),K(2),K(3),K(4),K(5)+h,T)+a)/h^2;
G=[g11, g12, g13, g14, g15; g21, g22, g23, g24, g25; g31, g32 ,g33, g34, g35; g41, g42 ,g43, g44, g45; g51, g52 ,g53, g54, g55;];
%G1=G.^-1;
G1=inv(G);
%построение градиента
gr1=(Xr5(K(1)+h,K(2),K(3),K(4),K(5), T)-a)/h;
gr2=(Xr5(K(1),K(2)+h,K(3),K(4),K(5), T)-a)/h;
gr3=(Xr5(K(1),K(2),K(3)+h,K(4),K(5), T)-a)/h;
gr4=(Xr5(K(1),K(2),K(3),K(4)+h,K(5), T)-a)/h;
gr5=(Xr5(K(1),K(2),K(3),K(4),K(5)+h, T)-a)/h;
grad=[gr1 gr2 gr3 gr4 gr5]';
if(Xr5(K(1),K(2),K(3),K(4),K(5),T)>Xr5(K0(1),K0(2),K0(3),K0(4),K0(5),T))
L=lambdamin(K0,G10,grad0);
end
K0=K;
G10=G1;
grad0=grad;
K=K0+L*G1*grad;
J=Xr5(K(1),K(2),K(3),K(4),K(5),T);
end
disp(K0);
disp(J0);
Метод Золотого Сечения
function L=lambdamin(K,G1,grad)
Xzs=(-1+sqrt(5))/2; %золотое сечение
a=0;
b=1;
while (abs(b-a) >0.01)
x1=a+(b-a)*Xzs;
x2=b-(b-a)*Xzs;
F1=K-x1*G1*grad;
F2=K-x2*G1*grad;
if ((x1 < x2)&&(Xr5(F1(1),F1(2),F1(3),F1(4),F1(5),2) <= Xr5(F2(1),F2(2),F2(3),F2(4),F2(5),2)))
b=x2;
end
if ((x1 > x2)&&(Xr5(F1(1),F1(2),F1(3),F1(4),F1(5),2) <= Xr5(F2(1),F2(2),F2(3),F2(4),F2(5),2)))
a=x2;
end
if ((x1 < x2)&&(Xr5(F1(1),F1(2),F1(3),F1(4),F1(5),2) > Xr5(F2(1),F2(2),F2(3),F2(4),F2(5),2)))
a=x1;
end
if ((x1 > x2)&&(Xr5(F1(1),F1(2),F1(3),F1(4),F1(5),2) > Xr5(F2(1),F2(2),F2(3),F2(4),F2(5),2)))
b=x1;
end
end
L=abs((x2-x1)/2);
Построение эталонного и реального выходного сигнала, поиск значения функционала.
function J=Xr5(Kp,Kd,Ki,Kp2,Kd2,t)
%коэффициенты ДУ
a4=1;
a3=(7.4+5*Kd*Kp2+5*Kp*Kd2+10*Kd*Kd2)/(1+5*Kd*Kd2);
a2=(14+5*Kp*Kp2+10*Kp2*Kd+10*Kd2*Kp+5*Ki*Kd2)/(1+5*Kd*Kd2);
a1=(10*Kp*Kp2+10*Ki*Kd2+5*Kp2*Ki)/(1+5*Kd*Kd2);
a0=(10*Ki*Kp2)/(1+5*Kd*Kd2);
b3=5*Kd/(1+5*Kd*Kd2);
b2=(5*Kp+10*Kd)/(1+5*Kd*Kd2);
b1=(10*Kp+5*Ki)/(1+5*Kd*Kd2);
b0=10*Ki/(1+5*Kd*Kd2);
%шаг
h=0.01;
%начальные условия
X(1,1:4)=[0 0 0 0];
%матрица А (X'=AX+BY)
A=[0 1 0 0;
0 0 1 0;
0 0 0 1;
-a0 -a1 -a2 -a3];
%матрица B
B=[b3 b2 b1 b0]';
Y=[0 0 0 1]';
n=1;
k=1;
while(k<=10)
F(n,1:4)=(A*(X(n,1:4))'+B.*Y)';
X(n+1,1:4)=(X(n,1:4)'+h/10*(F(n,1:4))')';% Метод Эйлера
n=n+1;
k=k+1;
end
X(2,1:4)=X(n,1:4);
n=2;
I=[1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1];
while (n<=t/h)
F(n,1:4)=(A*(X(n,1:4))'+B.*Y)';
X(n+1,1:4)=(((I-5*h/12*A)^-1)*(X(n,1:4)'+h/12*(5*B.*Y+8*(F(n,1:4))'-(F(n-1,1:4))')))';
n=n+1;
end
i=1;
while(i<=n)
Xr(i)=X(i,1);
i=i+1;
end
%Найдем J0____________
i=0;
while(i<=t/h)
Xe(i+1)=1-exp((log(0.05)/2)*i*h);
i=i+1;
end
%нашли эталон
J=0;
i=1;
while(i<=t/h)
J=J+(Xr(i)-Xe(i))^2;
i=i+1;
end
%t=0:0.01:t;
%plot(t,Xr,t,Xe),grid on
Похожие работы


... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... целом как сложной системы в различных условиях. Вычислительные эксперименты с математическими моделями дают исходные данные для оценки показателей эффективности объекта. Поэтому математическое моделирование как методология организации научной экспертизы крупных проблем незаменимо при проработке народнохозяйственных решений. (В первую очередь это относится к моделированию экономических систем[6]). ...
... производительность планировочных работ в целом, но требует применения запоминающих устройств и устройств индикации. Цель данной работы – повышение производительности автогрейдера, выполняющего планировочные работы. Поставленная цель достигается путем применения системы стабилизации отвала, включающей запоминающее устройство и устройство индикации, позволяющей в процессе производства планировочных ...
... его, человек высказывает гипотезы, продвигающие его к знанию распознающей деятельности в природе, что позволяет ему успешно решать стоящие задачи. Рассматриваемый курс “Основы построения систем распознавания образов” и должен научить пониманию того, что лежит в основе современных гипотез распознавательной деятельности и как на этой основе упомянутые задачи решаются.1.1.2. Краткая история вопроса ...
0 комментариев