Навигация
Математическое моделирование в задачах расчета и проектирования систем автоматического управления
14666
знаков
0
таблиц
17
изображений
Московский государственный технический университет им. Н.Э. Баумана
Калужский филиал
Кафедра “САУ и Электротехники”
ЭИУ3-КФ
Расчётно-пояснительная записка к курсовой работе
на тему:
“ МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ В ЗАДАЧАХ РАСЧЕТА И ПРОЕКТИРОВАНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ”
по курсу:
Системы аналитических вычислений
Калуга
Содержание
1 Постановка задачи
2 Анализ устойчивости
3 Решение дифференциального уравнения интерполяционным методом Адамса
4 Синтез
Вывод
Список литературы
Приложение 1 (Листинг скрипта для нахождения корней полинома)
Приложение 2 (Листинг скрипта для решения дифференциального уравнения
численным методом)
Приложение 3 (Листинг скриптов для нахождения коэффициентов регулятора)
1 Постановка задачи
Требуется:
1. Выполнить анализ устойчивости работы нескорректированной системы управления.
2. Выполнить анализ функционирования системы
3. Синтезировать регулятор для системы управления.
4. Выполнить анализ работы скорректированной системы управления.
Структурная схема системы приведена на рис. 1.
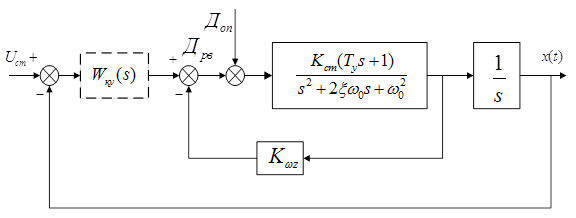 Рис. 1. Структурная схема контура стабилизации угла тангажа
Рис. 1. Структурная схема контура стабилизации угла тангажа
Параметры системы имеют следующие значения:
![]()
![]()
![]()
![]()
Требования к системе:
![]()
2 Анализ устойчивости
Выполним анализ нескорректированной системы с использованием критериев Михайлова и Гурвица.
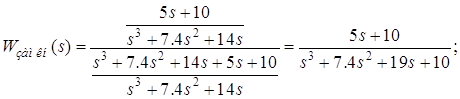
Найдем передаточную функцию всей системы
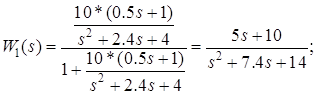
![]()
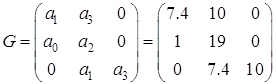
Составим матрицу Гурвица
![]()
a0=1; a1=7.4; a2=19; a3=10;
По критерию Гурвица для того, чтобы система была устойчива необходимо и достаточно, чтобы все определители на главной диагонали были больше нуля ![]() Найдем все миноры на главной диагонали:
Найдем все миноры на главной диагонали:
 Система устойчива.
Система устойчива.
Критерий Михайлова:
![]()
Из условия
![]() Получаем, что система устойчива.
Получаем, что система устойчива.
Построим годограф разомкнутой системы и найдем запас устойчивости.
На рис. 2 приведен график АФЧХ разомкнутой системы и единичная окружность.
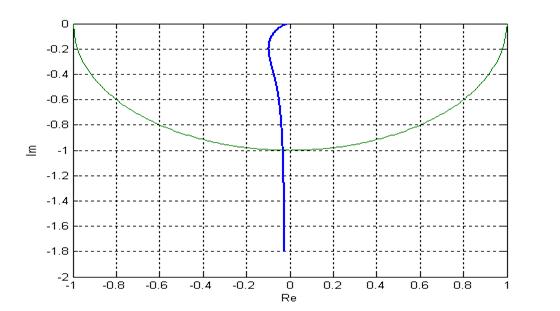
Рис. 2.Годограф АФЧХ разомкнутой системы
По рис. 2 легко определить запас устойчивости замкнутой системы.

Нахождение корней характеристического уравнения методом градиентов.
Найдем корни передаточной функции с помощью метода градиентов.
Рабочая формула используемого метода имеет следующий вид
![]()
где
![]() и
и ![]() векторы неизвестных на шаге k+1 и k.
векторы неизвестных на шаге k+1 и k.
![]() - транспонированная матрица Якоби, вычисленная на шаге k.
- транспонированная матрица Якоби, вычисленная на шаге k.
![]() Невязка на шаге k
Невязка на шаге k
 Шаговый множитель
Шаговый множитель
Находим полюса для передаточной функции, имеющий вид
![]()
Текст программы приведен в приложении 1.
Результат приведен на рис.3
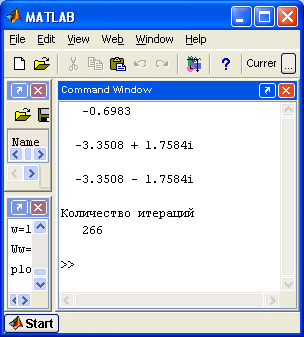
Рис. 3. Пример нахождения полюсов ПФ W(s)
Аналитические выражения для переходной и импульсной переходной функций, АЧХ, ФЧХ, АФЧХНайдем импульсную переходную функцию.
![]()
![]()
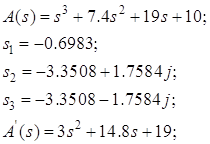

График k(t) приведен на рис. 4.
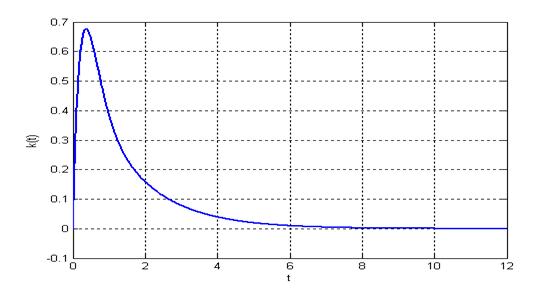
Рис. 4. График импульсной переходной функции.
Найдем переходную функцию.
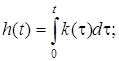

График h(t) приведен на рис. 5.
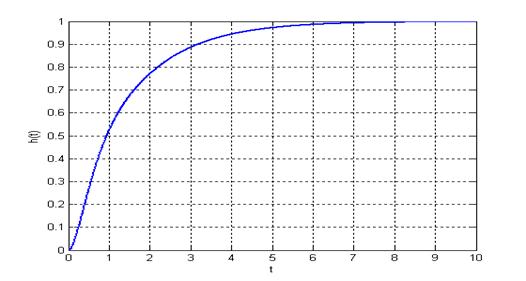
Рис. 5. График переходной функции.
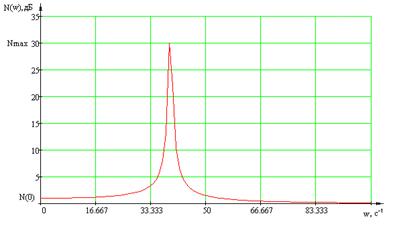
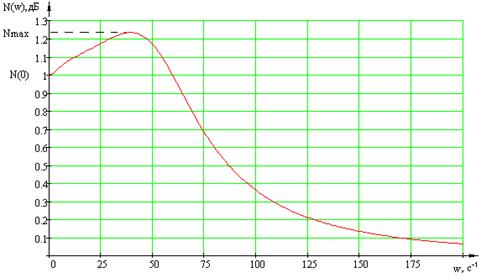
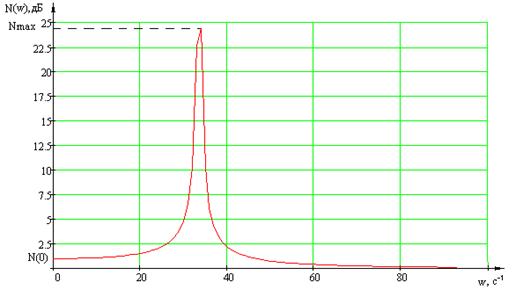
Найдем амплитудно-частотную характеристику.

График АЧХ приведен на рис. 6.
Рис. 6. График АЧХ
Найдем ФЧХ:
![]()

График ФЧХ приведен на рис. 7.
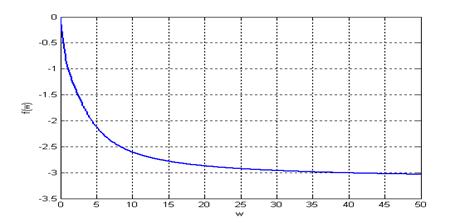
Рис. 7. График ФЧХ
Найдем АФЧХ.

График ФЧХ приведен на рис. 8.
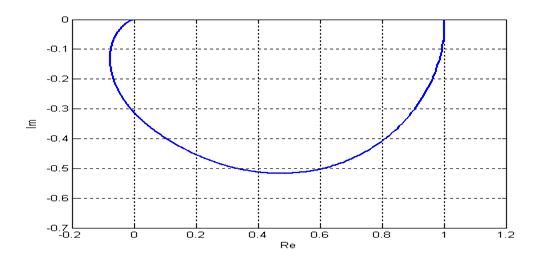
Рис. 8. График АФЧХ
Вывод: Система является устойчивой, перерегулирование равно 0, время управления примерно равно 5с.
Похожие работы


... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...
... целом как сложной системы в различных условиях. Вычислительные эксперименты с математическими моделями дают исходные данные для оценки показателей эффективности объекта. Поэтому математическое моделирование как методология организации научной экспертизы крупных проблем незаменимо при проработке народнохозяйственных решений. (В первую очередь это относится к моделированию экономических систем[6]). ...
... производительность планировочных работ в целом, но требует применения запоминающих устройств и устройств индикации. Цель данной работы – повышение производительности автогрейдера, выполняющего планировочные работы. Поставленная цель достигается путем применения системы стабилизации отвала, включающей запоминающее устройство и устройство индикации, позволяющей в процессе производства планировочных ...
... его, человек высказывает гипотезы, продвигающие его к знанию распознающей деятельности в природе, что позволяет ему успешно решать стоящие задачи. Рассматриваемый курс “Основы построения систем распознавания образов” и должен научить пониманию того, что лежит в основе современных гипотез распознавательной деятельности и как на этой основе упомянутые задачи решаются.1.1.2. Краткая история вопроса ...
0 комментариев