Навигация
Структура та склад мікропроцесорних систем керування АТЗ
20093
знака
0
таблиц
3
изображения
2. Структура та склад мікропроцесорних систем керування АТЗ
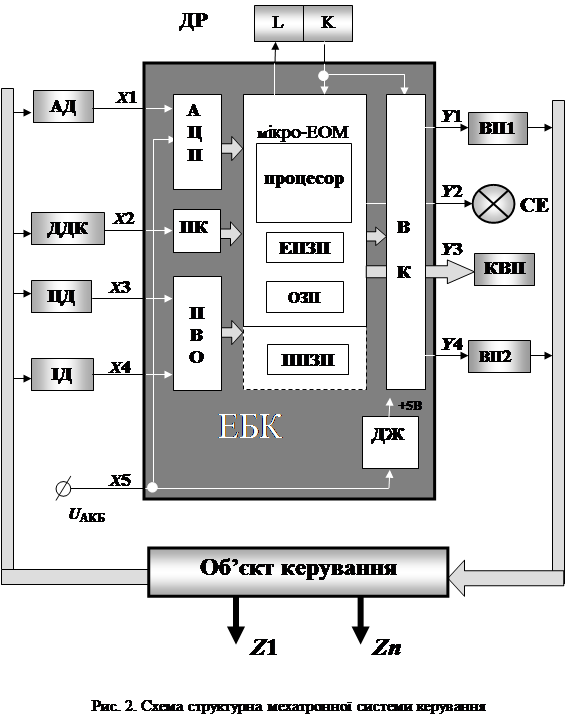
Автомобільні МП системи керування являють собою мехатронні системи, складовими яких є об’єкт керування, датчики вимірювальної інформації, виконавчі пристрої, електронний блок керування (рис.2.). Як об’єкти керування розглядаються механічні системи автомобіля: двигун, гальма, трансмісія, ходова частина та інші. Датчики утворюють вхідні електричні сигнали (структурні параметри), які характеризують миттєвий стан об’єкта керування. Вимірювальна інформація від датчиків надходить в ЕБК, в якому відбувається їх обробка та аналіз. ЕБК на підставі сигналів датчиків та інформації, що міститься у пам’яті МП, формує сигнали керування Y. Керування об’єктом здійснюється безпосередньо за допомогою виконавчих пристроїв (ВП), які перетворюють електричні сигнали керування на силові електричні, механічні та температурні впливи.
Датчики вимірювальної інформації можна класифікувати за різними ознаками: за призначенням або функцією перетворення; принципом дії чутливого елементу та способом реалізації (особливістю влаштування, видом сигналу, особливістю конструкції). Перш за все назва датчика визначає його застосування. Наприклад, датчик масової витрати повітря дозволяє вимірювати безпосередньо кількість повітря (призначення), термоанемометричний (принцип дії), мехатронний (особливість влаштування), стаціонарний (особливість конструкції), має вмонтований аналогово-цифровий перетворювач (вид сигналу).
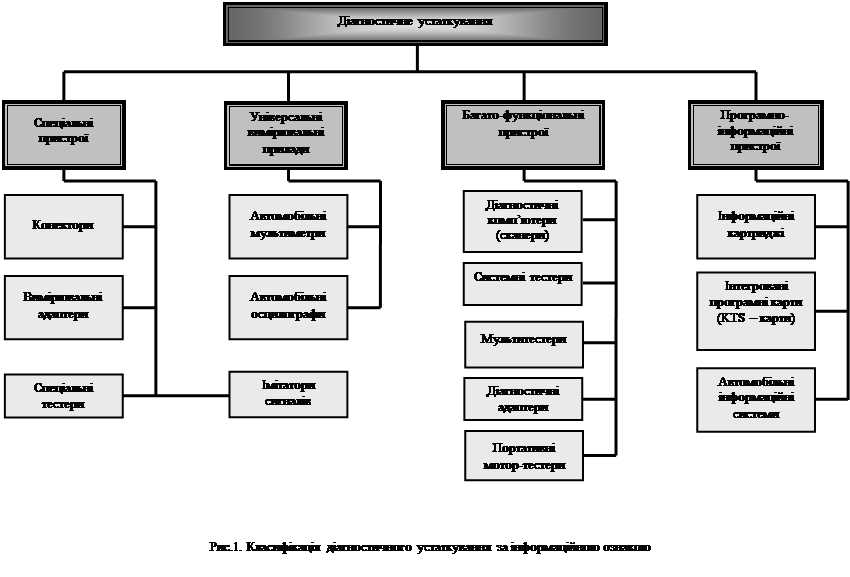
Класифікація датчиків вимірювальної інформації, що використовуються в системах керування автомобілем, наведено на рис. Пояснимо деякі класифікаційні ознаки та наведемо приклади датчиків, що їм відповідають.

Як датчик безпосереднього перетворення можна розглядати датчик температури охолоджуючої рідини, який реалізовано на напівпровідниковому терморизесторі. Датчик температури в якому використовується термобіметалева пластинка як чутливий елемент, а потенціометр – як формувач електричного сигналу буде двоступеневим (непрямим) вимірювачем.
В датчиках мехатронного типу передбачається наявність чутливого і вимірювального елементів, а також пристрою вхідної обробки (перетворення) початкового електричного сигналу. Такі датчики, як правило, виготовляються за інтегральною технологією. Наприклад, датчик розрядження МП системи запалювання базується на кремнієвій пластинці, що виконує функцію пружного чутливого елементу, на якій інтегровано тензорезистивний вимірювальний міст, підсилювач напруги та аналогово-цифровий перетворювач. На виході такого датчика формується сигнал у вигляді двійкового коду, що відповідає рівню розрядження. До переваг мехатронних датчиків слід віднести високу компактність, перешкодостійкість, монолітність виробу та надійність. До того ж мехатронні датчики не вимагають застосування додаткових вхідних пристроїв в структурі ЕБК.
До імпульсних відносяться датчики циклічного типу, в яких сигнал сприймається тільки за моментом (кількістю імпульсів або частотою їх надходження без аналізу час-амплітудних параметрів імпульсного сигналу (синхронізуючі імпульси). Прикладом імпульсного датчика може бути індукційний датчик початку відліку або положення колінчастого валу.
Сигнали оцифрованих значень мають вигляд прямокутних імпульсів, які нормуються за часом та амплітудою (дискретні сигнали). Як приклад можна навести датчик швидкості руху автомобіля мехатронного типу, в якому застосовується цифрова мікросхема Холла. Вихідний сигнал прямокутної форми такого датчика має фіксовані амплітуду та шпаруватість імпульсів.
Структура ЕБК містить вхідні пристрої попередньої обробки сигналів, що надходять з датчиків (рис. 2). Для датчиків з аналоговими сигналами (ДА) вхідним пристроєм є аналогово-цифровий перетворювач (АЦП), на вході якого, як правило, передбачено схему узгодження у вигляді масштабуючого підсилювача або атенюатору. Слід відзначити, що в деяких системах рівень напруги живлення борта UАКБ сприймається як вимірювальна інформація аналогового вигляду.
Сигнали від імпульсних датчиків (ІД) та від датчиків оцифрованих значень (ЦД) надходять в пристрій вхідної обробки (ПВО). Імпульсні сигнали в цьому пристрої спочатку підлягають формуванню, а потім надходять в лічильник, який утворює відповідний двійковий код. Сигнали оцифрованих значень надходять безпосередньо на відповідні лічильники.
Сигнали, які утворюються датчиками у вигляді двійкового коду (ДДК) надходять безпосередньо в МП або підлягають перетворенню з послідовного коду до паралельного за допомогою перетворювача коду (ПК).
Більшість датчиків вимірювальної інформації потребують електроживлення фіксованим значенням напруги. Ця напруга забезпечується стабілізованим джерелом живлення (ДЖ) (напруга живлення складає U = +5B). Вхідні пристрої та МП, що входять до складу ЕБК, теж споживають понижену напругу від стабілізованого ДЖ.
Електронна пам’ять ЕБК забезпечується трьома типами запам’ятовуючих пристроїв: програмованим постійно запам’ятовуючим пристроєм (ППЗП), оперативно запам’ятовуючим пристроєм (ОЗП), електрично-програмованим пристроєм (ЕПЗП).
ППЗП містить послідовність робочих команд, що утворюють алгоритми керування та калібрувальну інформацію. Калібрувальна інформація зберігається у вигляді характеристичних двомірних карток та залежить від маси автомобіля, типу та потужності ДВЗ, передаткового співвідношення трансмісії та інших конструктивних особливостей транспортного засобу. Інформація, що зберігається в ППЗП, не підлягає зміні в процесі експлуатації автомобіля та зберігається при відключенні живлення ЕБК.
ОЗП використовується для оперативного зберігання вимірювальних параметрів та термінової інформації з ППЗП, необхідної для розрахунків. Інформація знищується при відключенні живлення ЕБК.
ЕПЗП використовується для тимчасового зберігання кодів-паролей системи імобілайзера та корегуючих коефіцієнтів поновлення характеристичних карток під час адаптаційних процесів у системі керування. Інформація в ЕПЗП зберігається при відключенні живлення ЕБК, але підлягає поновленню в процесі експлуатації автомобіля.
Центральний процесор виконує арифметичні та логічні обчислення вимірювальних параметрів, що перебувають в ОЗП з метою вилучення необхідної калібрувальної інформації, яка зберігається в ППЗП або ЕПЗП.
З виходів МП отримані сигнали керування Y поступають на вихідні каскади (ВК), де підсилюються і узгоджуються з параметрами виконавчих пристроїв (ВП). Деякі інформаційні сигнали з виходів МП передаються безпосередньо на засоби індикації (СЕ, КВП) без попереднього підсилювання. До складу контрольно-вимірювальних приладів (КВП) входять штатні покажчики і сигналізатори, що містяться на панелі приладів та додаткові інформаційні пристрої, такі як економетр, маршрутний комп’ютер та інші.
В якості виконавчих пристроїв систем керування найчастіше застосовуються електромеханічні пристрої та агрегати, такі як електромагнітні приводи (форсунки, муфти вмикання, клапани), електромагнітні реле різного призначення, сервісні та крокові електродвигуни у складі регулюючих та дозуючих приводів. До виконавчих пристроїв слід додати нагріваючі елементи, електронні пристрої (комутатори струму) та комбіновані пристрої (модуль запалювання), що застосовуються в окремих системах керування. Слід зауважити, що потужні виконавчі пристрої управляються дистанційно за допомогою реле вмикання.
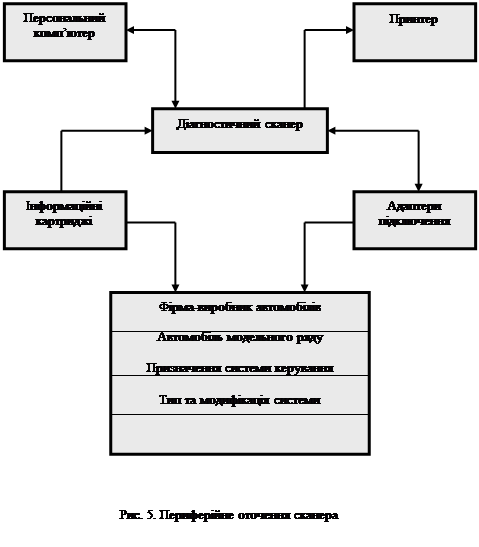
Наявність значної кількості елементів та застосування складних алгоритмів функціонування мехатронних систем керування потребує значної уваги при діагностиці стану системи в цілому, локалізації пошкодженого елементу, визначення місця та причини пошкодження. Для поліпшення процесу діагностування та зниження витрат на технічне обслуговування автомобілів в більшості МП систем керування передбачено вмонтовану систему самодіагностики (ССД). Під’єднання ССД до зовнішніх діагностичних приладів здійснюється за допомогою діагностичного рознімання (ДР), в якому передбачено два інформаційних канала – «line»(L) і «control»(K). По L-каналу інформація від системи надходить до зовнішнього монітору, а по К-каналу від зовнішньої клавіатури у середовище ЕБК.
Похожие работы

... ння мають додаткові функції цифрового запам’ятовуючого осцилографа, імітаторів сигналів датчиків, імітаторів керуючих сигналів виконавчих пристроїв та мультиметра. Як приклад розглянемо технічні характеристики діагностичного комп’ютера "Hi-Scan" (рис.4, а), розроблений фірмою Kumsan Electronics Co (Півд. Корея). Такий комп’ютер має такі технічні характеристики. Габарити приладу 25´16´5 ...

... платіжних систем, за видами платіжних карток, за категорією клієнтів; - Аналіз активності та використання платіжних карток клієнтами; - Аналіз ризиків та ефективності операцій банку з платіжними картками. Аналіз діяльності банку з використанням міжнародних платіжних карток проводиться з метою з'ясування доцільності здійснення цих операцій як для самого банку, так і для його клієнтів, а також ...
0 комментариев