Навигация
Перечень звеньев механизма
22206
знаков
10
таблиц
0
изображений
1.2.1 Перечень звеньев механизма
1. – кривошип; 2. – шатун; 3 – ползун.
1.2.2 Перечень кинематических пар0–1 – кинематическая пара 5-го класса, вращательная;
1–2 – кинематическая пара 5-го класса, вращательная;
2–3 – кинематическая пара 5-го класса, вращательная;
3–0 – кинематическая пара 5-го класса, поступательная;
1.3 Определение степени подвижности механизмаСтепень подвижности механизма определим по уравнению Чебышева
W= ![]() -
- ![]() -
- ![]()
где ![]() – количество движущихся звеньев механизма;
– количество движущихся звеньев механизма;
Для механизма, что исследуется, ![]() =3, кинематических пар 5-го класса
=3, кинематических пар 5-го класса ![]() =4, кинематические пары 4-го класса отсутствуют.
=4, кинематические пары 4-го класса отсутствуют.
Имеем: W=3×3–2×4=1.
Для работы механизму необходима только одно ведущее звено, так как степень подвижности равна единице.
1.4 Определение недостающих размеров 1.4.1 Определение длины
Определим длину l1 и l2, которые находятся из следующего неравенства:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
из формулы (1) ![]()
![]()

 ;
; ![]()
![]()
![]()
![]()
![]()
![]()
1.5 Описание определения кинематических характеристик рычажного механизма В левой части чертежа строим планы положений механизма. За начальное положение механизма принимаем положение, когда кривошип и шатун находятся в мертвом положении (вытянуты в одну линию). Затем строим 12 равноотстоящих положений входного звена (кривошипа АВ). Для выполнения построений планов положений механизма предварительно определяем масштабный коэффициент длины.
![]()
![]() -действительная длина звена АВ, м
-действительная длина звена АВ, м
АВ – отображающий ее отрезок на чертеже, мм
Принимаем АВ=60 мм.
![]() ;
; ![]()
![]() ;
; ![]()
![]()
Планы скоростей
Для построения планов скоростей воспользуемся векторными уравнениями для построения планов скоростей.
![]() (м/с)
(м/с)
Введем масштабный коэффициент скорости ![]() (м/мм*с)
(м/мм*с)
pb = vb / μv = ![]() = 71,6 мм
= 71,6 мм
![]()
Вектор скорости точки В перпендикулярен звену АВ, вектор скорости точки С направлен по направлению движения поршня 3, вектор скорости точки С относительно точки В перпендикулярен звену ВС.
Для построения отрезка ps2, изображающего вектор скорости центра масс S2, воспользуемся теоремой подобия:
![]() ;
; ![]()
Измеряем на планах скоростей длины соответствующих векторов и полученные значения записываем в таблицу 1.2.
Таблица 1.2
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| pc, мм | 0 | 42,9 | 69,6 | 72,2 | 55 | 28,1 | 1,1 | 29,8 | 55,2 | 71 | 68,3 | 42,4 |
| bc, мм | 71,6 | 63,9 | 39 | 2,6 | 34,5 | 61,4 | 71,6 | 63,3 | 38,4 | 2,6 | 33,9 | 60,8 |
| ps2, мм | 46,5 | 55,1 | 68,4 | 71,8 | 64,2 | 52,4 | 46,6 | 52,3 | 63,7 | 71,4 | 68,5 | 55,9 |
Вычерчиваем заданную индикаторную диаграмму, под линией движения ползуна. Масштабный коэффициент длин принимаем таким же как и для планов перемещений ![]() .
.
Максимальную ординату на графике давления принимаем равной 50 мм, тогда  .
.
Полный цикл водяного насоса совершается за 1 оборот кривошипа.
Значение силы полезного сопротивления FCопределяем по формуле: ![]() .
.
Знак «+» берется в том случае, когда сила FCнаправлена противоположно движению ползуна.
Определяем значения давлений и сил сопротивления для всех положений кривошипа. Результат заносим в таблицу 1.3.
Таблица 1.3
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| Pi, МПа | 0.02 | 0.02 | 0.02 | 0.02 | 0.02 | 0.02 | 0,8 | 0,8 | 0,8 | 0,8 | 0,8 | 0,8 |
| FCi, H | 830 | 830 | 830 | 830 | 830 | 830 | 33221 | 33221 | 33221 | 33221 | 33221 | 33221 |
Строим диаграмму аналогов скоростей рабочего звена, принимая максимальную ординату 150 мм.

Результаты заносим в таблицу 1.4.
Таблица 1.4
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| vqc, мм | 0 | 0,049 | 0,069 | 0,071 | 0,054 | 0,027 | 0,001 | 0,029 | 0,054 | 0,070 | 0,068 | 0,042 |
Принимаем масштабный коэффициент: ![]()
Строим диаграмму аналогов скоростей выходного звена в зависимости от угла поворота кривошипа.
1.7 Динамическая модель машинного агрегата
В связи с необходимостью в данном проекте выполнения динамического анализа кривошипно-ползунного механизма целесообразно динамическую модель машинного агрегата представить в виде вращающегося звена (звена приведения), закон движения которого был бы таким же, как и у кривошипа 1 механизма, т.е. ![]() ,
, ![]() ,
, ![]() .
.
Приведенный момент сил Mn представим в виде:
![]()
![]() -приведенный момент сил сопротивления.
-приведенный момент сил сопротивления.
![]() -приведенный момент движущих сил, принимается в проекте постоянный.
-приведенный момент движущих сил, принимается в проекте постоянный.
Приведенный момент инерции агрегата ![]() определяется из условия равенства кинематической энергии звена приведения и кинетической энергии звеньев машинного агрегата, характеризуемых переменными по величине аналогами скоростей, а приведенный момент Мn находится из условия равенства элементарных работ этого момента и тех действующих сил, которые приводятся к звену приведения.
определяется из условия равенства кинематической энергии звена приведения и кинетической энергии звеньев машинного агрегата, характеризуемых переменными по величине аналогами скоростей, а приведенный момент Мn находится из условия равенства элементарных работ этого момента и тех действующих сил, которые приводятся к звену приведения.
За звено приведения примем кривошип АВ.
Общая формула для определения приведенного момента инерции звеньев имеет вид:

В моем курсовом проекте эта формула будет следующей:

Отношение скоростей есть передаточные функции, которые определяются из планов скоростей.
Введем обозначения:
 ;
;  ;
; 


![]() кг
кг
![]() кг
кг
![]() кг
кг
![]()
![]()
![]() кг
кг![]()
![]() кг
кг![]()
![]()
 кг*м2/мм
кг*м2/мм
Результаты вычислений приведены в таблице 1.5. По этим же данным строим диаграмму приведенного момента инерции механизма.
Таблица 1.5
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| Jп, кг*м2 | 0,058 | 0,071 | 0,092 | 0,096 | 0,080 | 0,064 | 0,058 | 0,065 | 0,080 | 0,094 | 0,091 | 0,071 |
По оси абсцисс принимаем масштабный коэффициент:
![]()
где L – длина отрезка оси абсцисс, соответствующая углу 2π рад.
1.9 Расчёт приведенных моментов сил сопротивленияОпределяем приведенный к валу кривошипа момент ![]() от сил сопротивления, при этом учитываем действие сил
от сил сопротивления, при этом учитываем действие сил ![]() ,
, ![]() ,
, ![]() . Силу веса кривошипа
. Силу веса кривошипа ![]() учитывать не следует, так как ее работа равна нулю (центр тяжести кривошипа совпадает с осью вращения – его скорость равна нулю) и приведенный момент от нее равен нулю.
учитывать не следует, так как ее работа равна нулю (центр тяжести кривошипа совпадает с осью вращения – его скорость равна нулю) и приведенный момент от нее равен нулю.
Приведенный момент найдем из условия и равенства мощностей приведенного момента и приводимых сил:
![]()
α-угол между направлением силы ![]() и направлением скорости
и направлением скорости ![]() центра тяжести
центра тяжести ![]() .
.
Знак «+» перед мощностями сил веса и сил сопротивлений будем ставить тогда, когда эта сила является силой сопротивления; знак «–» перед движущими силами.
Окончательно получим:

Fc [1–6] = 830 H
Fc [7–12] = 33221 H
G2 = m2*g = 7.8*9.81 = 76,518 H
G3 = m3*g = 7.8*9.81 = 76,518 H
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| cos α | 0.034 | -0.669 | -0.933 | -0.999 | -0.939 | -0.656 | -0.034 | 0.615 | 0.920 | 0.999 | 0.951 | 0.707 |
Результаты заносим в таблицу 1.6.
Таблица 1.6
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| Mпр, Hм | -0,0955 | -23,308 | -37,5718 | -36,641 | -29,09 | -14,64 | -28,89 | -778,34 | -1441,8 | -1854,7 | -1784,4 | -1107,8 |
![]()
1.10 Определение работы сил сопротивления А и движущих сил Аg
Так как работы сил сопротивления равны  , то график
, то график ![]() строим методом численного интегрирования графика
строим методом численного интегрирования графика ![]() по формуле трапеции:
по формуле трапеции:
![]()
![]() - шаг интегрирования
- шаг интегрирования
Результаты заносим в таблицу 1.7
Таблица 1.7
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 1» | |
| А, Дж | 0 | -6,12 | -22 | -41,4 | -58,6 | -70 | -81,38 | -292,6 | -873,4 | -1735,9 | -2688 | -3444,7 | -3734,5 |
 Дж/мм
Дж/мм
Для построения графика изменения кинетической энергии поступаем следующим образом: вычитаем ординаты графика ![]() из соответствующих ординат графика
из соответствующих ординат графика ![]() и строим график суммарной (избыточной) работы
и строим график суммарной (избыточной) работы ![]() , который одновременно является графиком изменения кинетической энергии механизма и приведенного момента инерции.
, который одновременно является графиком изменения кинетической энергии механизма и приведенного момента инерции.
![]() Дж/мм
Дж/мм
Для определения момента инерции маховика по закону коэффициента неравномерности движения δ следует провести касательные к графику «энергия-масса» под углами ψmaxи ψminк оси абсцисс (оси приведенного момента инерции) тангенсы которых определяются по формуле:


![]() ;
; ![]()
![]() кг*м2
кг*м2
Т.к. маховик выполнен в форме стального диска, момент инерции маховика будет равен:
![]() ,
,
где m – масса маховика, r – плотность (для стали r=7800 кг/м3), yb = b/D – относительная ширина маховика.
Подставив значения получим:
![]()
 (кг)
(кг)
Истинная угловая скорость звена приведения находится следующим образом:
 ;
;
где 
 Дж
Дж
 с-1
с-1
Результаты вычислений приведены в таблице 1.8
Таблица 1.8
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
|
| 29,88 | 29,89 | 29,89 | 29,91 | 29,94 | 29,97 | 29,99 | 29,99 | 29,96 | 29,92 | 29,88 | 29,87 |

Проверка:  %
%
2. Динамический анализ рычажного механизма
Силовой расчет механизма
Задачей силового анализа является определение при заданном законе движения неизвестной внутренней силы, то есть усилия (реакции) в кинематических парах. Эта задача решается с применением принципа Даламбера. Силовой расчет плоских рычажных механизмов выполняется по группам Асура в порядке обратном их присоединения к входному звену.
Похожие работы
... на отдых и личные надобности % от оперативного времени, Тот.л.-6%. Расчет технически обоснованной операции – сварочной нецелесообразно производить, так как в пункте 3.7 были описаны режимы сварки, инструмент и применяемое оборудование. Технологическая документация Технологический процесс на восстановление деталей согласно стандарта Единой Системы Технологической Документации оформляется ...




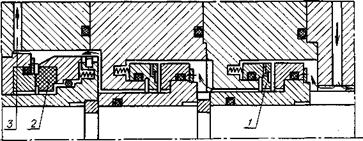
... ірної або охолоджуючої води. Необхідний ресурс - не менше 10 тис. год. Рисунок 15 - Схема установки для випробувань натурних вузлів ущільнень: 1 - фільтр; 2 - бак; 3 - насос; 4 - гідроакумулятор; 5 - компресор; 6 - витратомірний пристрій; 7-теплообмінник; 8 - гідроциклон; 9 - прилад; 10, 11 та 12 - ступені основного ущільнення; 13 - плаваюче ущільнення; 14 - допоміжна ступень ущільнення; ...



... ів, тоді як у 2001 - 42%. Тобто з кожним роком вітчизняні виробники побутових насосів продовжують здавати свої позиції. Торгові марки на ринку побутових насосів. Властиво, по-справжньому відомих марок побутових насосів, тобто тих, що "на слуху" у всіх торговців, на українському ринку не так і багато. Насамперед пригадуються німецькі "гранди" Wіlo і Grundfos. Ці дві марки поділили між собою ринок ...
... заусенцев и т.д. Рабочие колеса не должны иметь износа лопаток и дисков от коррозии и эрозии более 25% от них номинальной толщины. Изгиб лопаток не допускается. 4.6 Ведомость дефектов на ремонт центробежного насоса марки НГК 4х1 Таблица 4.6.1 - Ведомость дефектов Наименование узлов и дета лей подлежа щих ре монту Характер неис прав ности Метод уст ранения Необходимые мате риалы ...
0 комментариев