Навигация
Преобразование модели регулятора в форму, отвечающую ее реализации в программном обеспечении
44027
знаков
4
таблицы
15
изображений
6. Преобразование модели регулятора в форму, отвечающую ее реализации в программном обеспечении
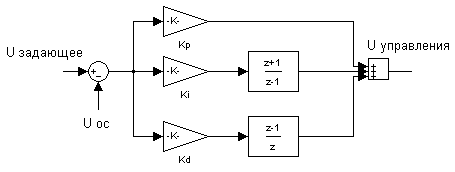
ПИ закон регулирования вычисляется по формулам:
y=C*x; x=Ad*x+Bd*(u+f);
e=-z+y;
u=Cr*xr; xr=Ar*xr+Br*e;
Где Ar,Br,Cr матрицы регулятора:
K1=K(:,1:n);K2=K(:,n+1:n+m);
L1=L(1:n,:);L2=L(n+1:n+l,:);
Ar2=[ Ad-Bd*K1 -Bd*K2-L1 L1;
C eye(l)-L2 L2;
zeros(l,n) zeros(l) eye(l)];
Br2=[Bd;zeros(l,m);eye(m)];
Cr2=[-K zeros(m,l)];
7. Выбор технических средств реализации системы управления
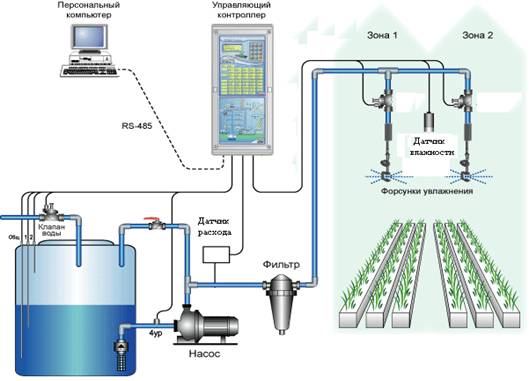
Технические средства реализации системы управления включают датчики регулированных параметров, исполнительные механизмы и регулирующие органы, преобразователи, рабочую станцию.
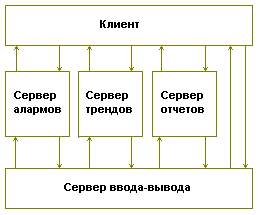
Общая структурная схема рабочей станции изображена на рисунке
Рабочая станция имеет вид:

Рисунок. Схема рабочей станции.
| № | Наименование | Количество |
| 1 | Мат. плата Gigabyte GA-EG41MFT-US2H | 1 |
| 2 | Процессор DualCore AMD Athlon 64 X2, 2200 MHz (11 x 200) 4200+ | 1 |
| 3 | Модуль памяти DIMM2: Samsung M3 78T2863QZS-CF7 1Гб | 2 |
| 4 | Жесткий диск SAMSUNG 500Гб | 1 |
| 5 | Видеокарта NVIDIA GeForce 8500 GT 512мб. | 1 |
| 6 | Монитор 19 LG TFT W1942SE PF | 1 |
| 7 | Клавиатура Sven KB-2925 PS/2 | 1 |
| 8 | МышьA4Tech A4Tech OP-50D Optical PS/2 | 1 |
| 9 | Корпус Zalman MS1000-HS1 | 1 |
Таблица. Технические характеристики компьютера
| № | Тип | К-во | Найменування |
| 1 | БАЙКАЛ-МК | 1 | Гигрометр кулометрический стационарный |
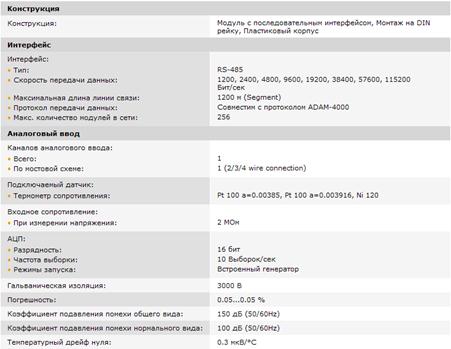
| 2 | ADAM-4013 1 | 3 | термометр сопротивления |
| 3 | ADAM 4069 | 4 | Модуль c релейными выходами, 8 реле с нормально разомкнутым контактом, нагрузочная способность контактов: 250 В/ 5 A для перем. тока, 30 В/ 5 A для пост. тока, время включения 5 мс , время выключения 5,6 мс |
| 4 | МЭО 40/25-0,25 | 4 | Механизм исполнительный одно-оборотный , номинальный крутя-щий момент 40кгс/м, номинальный ход выходного органа 0,25 оборота за 25с, Напряжение питания 220В. Частота 50Гц |
Таблица. Упрощённая спецификация технических средств.
8. Технические средства автоматизации
БАЙКАЛ-МК гигрометр кулонометрический стационарный

Предназначен для измерений объемной доли влаги в азоте, кислороде, водороде, углекислом газе, воздухе и их смесях, а также в инертных и других газах, не взаимодействующих с фосфорным ангидридом, и представляет собой стационарный прибор непрерывного действия. Принцип действия гигрометра основан на кулонометрическом методе измерения. Гигрометр выпускается в 3-х исполнениях:
- с датчиком на высокое давление (от 0,16 до 40 МПа);
- с датчиком на низкое давление (от 0,03 до 0,16 МПа);
- с датчиком на разрежение (от минус 0,005 до плюс 0,03 МПа).
Гигрометр используется в химической, нефтехимической промышленности, на предприятиях по производству полупроводников, микросхем, микроконтроллеров, полимерных материалов, легированных сталей, а также в атомной промышленности и наземных космических объектах. Показатели конкурентоспособности:
- выбор единиц измерений по влажности с отображением на дисплее: ppm, мг/м3, °С т.р.;
- наличие интерфейса RS-485 для связи с ЭВМ;
- наличие функции почасового и суточного архива с энергонезависимой памятью;
- дисплей повышенной яркости;
- автоматический выбор диапазонов измерений;
- высокая точность и надежность;
- устройство сигнализации о неисправности чувствительного элемента;
- устройство задания и сигнализации о превышении в анализируемом газе заданного значения объемной доли влаги;
- активная защита чувствительного элемента по напряжению и влажности;
- измерительная схема гигрометра выполнена на микроконтроллере;
- возможность реализации альтернативной независимой поверки при отсутствии эталонов;
- возможность размещения блоков гигрометра друг от друга на расстоянии до 300 м.


ADAM-4013 1-канальный модуль аналогового ввода сигнала стермосопротивления


Вывод
Разработан проект автоматической системы регулирования промышленного кондиционера. Данный проект включает следующие элементы:
1) Математическое обеспечение: разработана математическая модель объекта виде матриц входов, внутренних состояний и выходов; данные матрицы переведены в дискретное время; разработан многомерный ПИ регулятор. Все расчеты проведены автоматически в среде Matlab.
2) Техническое обеспечение: разработан функциональная схема автоматизации, подобрано оборудование для технической реализации данной системы.
3) Программное обеспечение: разработана программа, моделирующая поведение системы.
Испытание данной программы показало удовлетворительные результаты, что говорит о том что разработанное математическое обеспечение адекватно объекту автоматизации
Литература
1. Стопакевич А.А. Теория систем и системный анализ. Учебник для вузов.- Киев: ВИПОЛ, 1996.-200 с.
2. Стопакевич А.А. Сложные системы: анализ, синтез, управление. Монография. - Одесса: КРЕД, 2004.-278 с.
3. Демченко В.А. Автоматизация и моделирование технологических процессов АЭС и ТЭС.- Одесса: Астропринт, 2001.-308с.
4. Потемкин В.Г., Рудаков П.И. Matlab 5.0 для студентов. - М.: Диалог-МИФИ, 1999.-448с.
5. Стопакевич А.А. Matlab. Методические указания к лабораторным работам, курсового и дипломного проектирования. - Одесса, 2000.-18 с.
6. Каталог продукции фирмы ProSoft. - М.,2003.-178 с.
7. Чистяков В.С. Краткий справочник по теплофизическим измерениям. - М.: Энергоатомиздат, 1990.-320 с.
Приложение А
Текст программы
A=[-1/118 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
1/26.7 -1/26.7 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 4/14 -2/14 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 -1/1300 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 4/80 -2/80 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 -1/118 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 1/26.7 -1/26.7 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 4/-14 -2/14 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 -1/118 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 1/26.7 -1/26.7 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 4/14 -2/14 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 -1/430 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 4/80 -2/80 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 -1/470 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 4/170 -2/170 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/480 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/180 -2/180 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/430 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/100 -2/100 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/840 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/100 -2/100 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/800 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/250 -2/250 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/570 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/300 -2/300 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/450 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/150 -2/150 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/640 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/220 -2/220 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/540 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/300 -2/300 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1/950 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 4/480 -2/480];
B=[6.5/118000;
0000;
0000;
0-6.1/130000;
0000;
006.5/1180;
0000;
0000;
0 006.5/118;
0 000;
0 000;
00.4/43000;
0000;
000.3/4700;
0000;
0000.9/480;
0000;
-0.7/430000;
0000;
00.2/84000;
0000;
000.9/8000;
0000;
0000.5/570;
0000;
-0.1/450000;
0000;
00.1/64000;
0000;
000.1/5400;
0000;
0000.2/950;
0000];
%B=[ 0 0 0 0;0 0.4/430 0 0;0 0 0 0;0 0 0.3/470 0;0 0 0 0;0 0 0 0.9/480;0 0 0 0;-0.7/430 0 0 0;0 0 0 0;0 0.2/840 0 0;0 0 0 0;0 0 0.9/800 0;0 0 0 0;0 0 0 0.5/570;0 0 0 0;-0.1/450 0 0 0;0 0 0 0;0 0.1/640 0 0;0 0 0 0;0 0 0.1/540 0;0 0 0 0;0 0 0 0.2/950;0 0 0 0];
C=[0 -1 1 -1 1 0 -1 -1 0 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 -1 1 -1 1 -1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 1 -1 1 -1 1 -1 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -1 1 -1 1 -1 1 -1 1];
dt=0.1/max(abs(eig(A))); %0.25
D=zeros(4);
t=[0:dt:5000];
[Ad Bd]=c2d(A,B,dt);
G=length(t);
y=dstep(Ad,Bd,C,D,1,G);
figure(1)
subplot(4,4,1); plot(t,y(:,1));grid;ylabel('y1,РЎ');title('Razgon u1,1%');
subplot(4,4,5); plot(t,y(:,2));grid;ylabel('y2,РЎ');
subplot(4,4,9); plot(t,y(:,3));grid;ylabel('y3,РЎ');
subplot(4,4,13); plot(t,y(:,4));grid;ylabel('y4,РЎ');
y=dstep(Ad,Bd,C,D,2,G);
subplot(4,4,2); plot(t,y(:,1));grid;ylabel('y1,РЎ');title('Razgon u2,1%');
subplot(4,4,6); plot(t,y(:,2));grid;ylabel('y2,РЎ');
subplot(4,4,10); plot(t,y(:,3));grid;ylabel('y3,РЎ');
subplot(4,4,14); plot(t,y(:,4));grid;ylabel('y4,РЎ');
y=dstep(Ad,Bd,C,D,3,G);
subplot(4,4,3); plot(t,y(:,1));grid;ylabel('y1,РЎ');title('Razgon u3,1%');
subplot(4,4,7); plot(t,y(:,2));grid;ylabel('y2,РЎ');
subplot(4,4,11); plot(t,y(:,3));grid;ylabel('y3,РЎ');
subplot(4,4,15); plot(t,y(:,4));grid;ylabel('y4,РЎ');
y=dstep(Ad,Bd,C,D,4,G);
subplot(4,4,4); plot(t,y(:,1));grid;ylabel('y1,РЎ');title('Razgon u4,1%');
subplot(4,4,8); plot(t,y(:,2));grid;ylabel('y2,РЎ');
subplot(4,4,12); plot(t,y(:,3));grid;ylabel('y3,РЎ');
subplot(4,4,16); plot(t,y(:,4));grid;ylabel('y4,РЎ');
A1=[Ad zeros(33,4); C eye(4)];
B1=[Bd;zeros(4)];
C1=[zeros(4,33) eye(4)];
Q=[eye(33) zeros(33,4);zeros(4,33) eye(4)];
R=eye(4);
Q1=eye(37);
R1=eye(4);
K=dlqr(A1,B1,Q,R);
L=dlqr(A1',C1',Q1,R1)';
K1=K(:,1:33);
K2=K(:,34:37);
L1=L(1:33,:);
L2=L(34:37,:);
Ar=[Ad-Bd*K1 -Bd*K2-L1 L1; C eye(4)-L2 L2; zeros(4,33) zeros(4) eye(4)];
Br=[zeros(33,4); zeros(4); eye(4)];
Cr=[-K zeros(4)];
x=zeros(33,1); xr=zeros(41,1); u=zeros(4,1);
yy=[]; uu=[];f=[0.5;0.5;0.5;1];z=[7;0.8;1.5;2.8];
for i=1:10000,
y=C*x; e=-z+y;
u=Cr*xr; xr=Ar*xr+Br*e;
y=C*x; x=Ad*x+Bd*(u+f);
yy=[yy; y']; uu=[uu; u'];
end
x1=x; xr1=xr; u1=u;
figure(2)
subplot(4,4,2); plot(yy(:,1));grid;ylabel('y1,C');title('y1');
subplot(4,4,4); plot(yy(:,2));grid;ylabel('y2,C');title('y2');
subplot(4,4,6); plot(yy(:,3));grid;ylabel('y3,C');title('y3');
subplot(4,4,8); plot(yy(:,4));grid;ylabel('y4,C');title('y4');
subplot(4,4,1); plot(uu(:,1));grid;ylabel('u1,%');title('u1');
subplot(4,4,3); plot(uu(:,2));grid;ylabel('u2,%');title('u2');
subplot(4,4,5); plot(uu(:,3));grid;ylabel('u3,%');title('u3');
subplot(4,4,7); plot(uu(:,4));grid;ylabel('u4,%');title('u4');
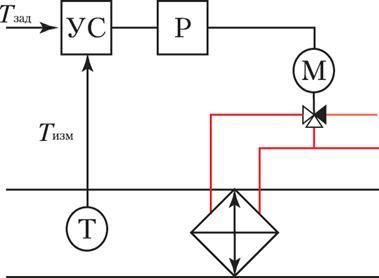
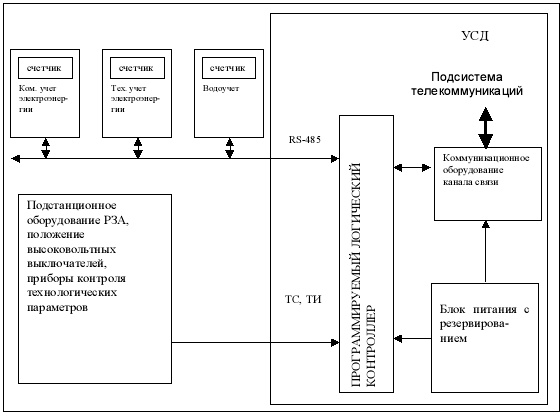
Функциональная схема автоматизации приведена на рисунке
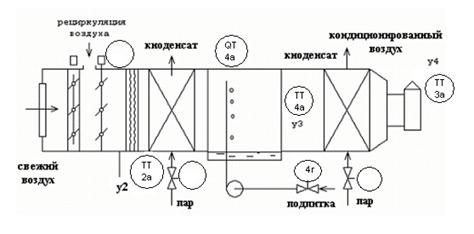
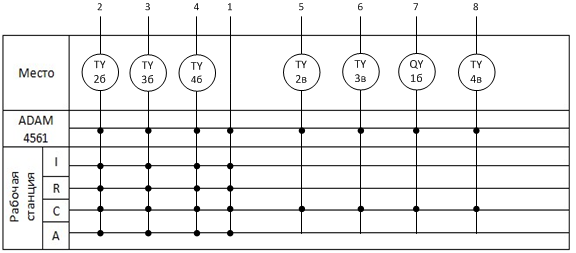
Рисунок – Функциональная схема автоматизации
Похожие работы

... [3 (п.9.13в)]; - обеспечения минимального расхода наружного воздуха в системах с переменным расходом [3 (п.9.15)] и др. 3.4 Регулирующие функции Регулирующие функции – автоматическое поддержание заданных параметров являются основными по определению [3 (п.9.11)] для систем воздушного отопления, приточной и вытяжной вентиляции, работающей с переменным расходом, рециркуляцией воздуха, систем ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...




... А вот традиционные центральные системы кондиционирования надо закладывать в проект еще на стадии строительства. Благодаря целому ряду уникальных достоинств VRV системы составили серьезную конкуренцию традиционным центральным системам кондиционирования воздуха, а в ряде стран, например в Японии, практически полностью вытеснили их с рынка. Конечно, на этом прогресс в развитии климатической техники ...
... управления осуществляется с помощью автоматизированного модуля верхнего уровня, который также отвечает за интерфейс на посту оператора. 3.1 Требования к структуре системы Автоматизированная система управления и контроля климата в тепличных хозяйствах выполнена на базе микропроцессорной техники. По иерархическому принципу АСУ ККТХ должна подразделяться на уровни: нижний уровень: - ...
0 комментариев