Навигация
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
16711
знаков
10
таблиц
2
изображения
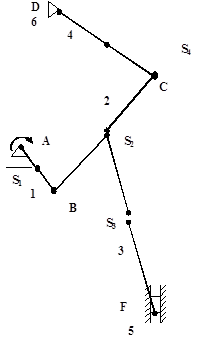
1.3 КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Кинетостатический расчет, положенный в основу силового расчета механизма, базируется на принципе Д’Аламбера, который в общем случае движения звеньев механизмов, совершающих сложное плоское движение, позволяет решить задачу путем сведения сил инерции звеньев к главному вектору инерции Fi и к главному моменту сил Mi.
![]() (1.3.1)
(1.3.1)
Знак “-” означает, что вектор силы инерции направлен в сторону противоположную ускорению центра масс.
Массы звеньев рассчитываются с помощью формулы:
![]() (1.3.2)
(1.3.2)
где q = 0.1 кг/м,
l – длина звена.
m = P/g,
где P – вес звена (H),
g – ускорение свободного падения.
g = 9.8 м/с2.
Также существует главный момент инерции звена, который приложен к центру масс звена и направлен в противоположную угловому ускорению звена сторону
![]() (1.3.3)
(1.3.3)
где ![]() — момент инерции звена,
— момент инерции звена,
![]() — угловое ускорение звена.
— угловое ускорение звена.
1.3.1 РАСЧЕТ СИЛ И ГЛАВНЫХ МОМЕНТОВ ИНЕРЦИИ ЗВЕНЬЕВ МЕХАНИЗМА
![]() .
.
mAB = 2,6 кг.
![]()
![]()
mCA 0,008кг.
![]()
![]()
mEF =0.0105кг.
![]()
![]()
mDC=0.005кг
![]()
 ,
,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Силы и главные моменты инерции приведены в таблице
|
|
|
|
|
|
|
|
| |
| |||||
| 222.3 | 0.89 | 0.48 | 0.5 | 0 | 0.89 |
|
Таблица 1.3.1. Рассчитанные значения сил и моментов инерции звеньев механизма
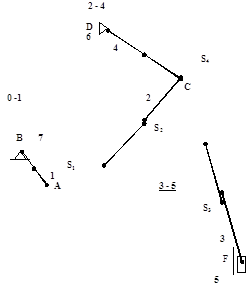
1.3.2 ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В КИНЕМАТИЧЕСКИХ ПАРАХСиловой анализ механизма начинаем с группы Ассура 3-5, наиболее удалённой от ведущего звена. Связи в шарнирах заменяются реакциями ![]() и
и ![]() .
.
В шарнире F реакция неизвестна по модулю и направлена по горизонтали. Обозначим в точке ![]() силу инерции. Обозначим также вес
силу инерции. Обозначим также вес ![]() звена FE и вес ползуна Р.
звена FE и вес ползуна Р.
Сумма моментов относительно точки F равна нулю:
![]()
![]() (1.3.4)
(1.3.4)
где ![]() ,
,![]() — плечи соответствующих силы
— плечи соответствующих силы ![]() и веса
и веса ![]()
Находим ![]() :
:
![]() (1.3.5)
(1.3.5)
![]()
Составляем векторное уравнение:
![]() (1.3.6)
(1.3.6)
С учётом этого уравнения строим замкнутый силовой многоугольник. На чертеже выбираем полюс ![]() . От него проводим вектор произвольной длины по направлению силы
. От него проводим вектор произвольной длины по направлению силы ![]() .Вычисляем масштабный коэффициент:
.Вычисляем масштабный коэффициент:
![]() (1.3.7)
(1.3.7)
![]()
Далее к вектору ![]() достраиваем другие составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи масштабного коэффициента.
достраиваем другие составляющие уравнения (1.3.6), рассчитывая длину векторов при помощи масштабного коэффициента.
Определяют реакции в кинематической паре 2-4. Реакции в шарнирах A и D нужно разложить на составляющие по направлению осей ![]() и
и ![]() , и перпендикулярные им:
, и перпендикулярные им: ![]() и
и ![]() . Тангенциальные составляющие можно найти, если записать уравнение суммы моментов каждого звена относительно точки С.
. Тангенциальные составляющие можно найти, если записать уравнение суммы моментов каждого звена относительно точки С.
Условия равновесия звеньев 2 и 3 соответственно:
![]() (1.3.9)
(1.3.9)
![]()
![]() (1.3.10)
(1.3.10)
![]()
Рассмотрим уравнение равновесия группы в целом. Запишем векторное уравнение равновесия этой группы:
![]() (1.3.11)
(1.3.11)
В этом уравнении все составляющие, кроме ![]() , известны по модулю и по направлению. Нужно построить замкнутый силовой многоугольник, откладывая последовательно векторы сил.
, известны по модулю и по направлению. Нужно построить замкнутый силовой многоугольник, откладывая последовательно векторы сил.
![]() (1.3.12)
(1.3.12)
![]()
Рассмотрим уравнение равновесия группы в целом. Запишем векторное уравнение равновесия этой группы:
![]() (1.3.13)
(1.3.13)
В этом уравнении все составляющие, кроме ![]() , известны по модулю и по направлению. Нужно построить замкнутый силовой многоугольник, откладывая последовательно векторы сил.
, известны по модулю и по направлению. Нужно построить замкнутый силовой многоугольник, откладывая последовательно векторы сил.
Теперь определим уравновешивающую силу и уравновешивающий момент, действующий на кривошип AB.
На кривошип AB действует шатун силой ![]() . Считается, что сила
. Считается, что сила ![]() приложена перпендикулярно звену AB. В этом случае уравнение моментов всех сил, приложенных к кривошипу относительно точки B, имеет вид:
приложена перпендикулярно звену AB. В этом случае уравнение моментов всех сил, приложенных к кривошипу относительно точки B, имеет вид:
![]()
![]() (1.3.12)
(1.3.12)
 (1.3.13)
(1.3.13)
![]()
![]() (1.3.14)
(1.3.14)
![]()
Найденные при силовом анализе механизма величины представлены в таблице 1.4.
|
|
|
|
|
|
|
|
|
|
|
|
| 57 | 48 | 65 | 0.22 | 0.6 | 0.8 | 0.79 | 0.7 | 0.9 | 73 | 1.9 |
Таблица 1.4. Силовой анализ механизма
Похожие работы
... длину вектора и переведем ее обратно: = 79 мм = 2370 Н 2. ПРОЕКТНЫЙ РАСЧЕТ ЗВЕНЬЕВ МЕХАНИЗМА НА ПРОЧНОСТЬ 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Такими внешними силами являются силы инерции , моменты инерции и реакции в кинематических парах R. Под ...
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
0 комментариев