Навигация
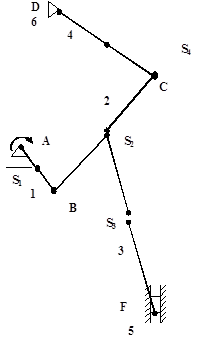
1.3 Силовой анализ механизма
Метод силового анализа механизма с использованием сил инерции и установления динамического уравнения носит название кинестатического расчета. Этот расчет основан на принципе д'Аламбера, который предполагает, что в общем случае все силы инерции звена, совершающие сложное движение, могут быть сведены к главной векторной силе инерции (которые для каждого звена были рассчитаны в предыдущем пункте) и к паре сил инерции, которая определяется по формуле:
![]() ,
,
где ![]() – момент инерции звена относительно оси проходящей через центр масс звена;
– момент инерции звена относительно оси проходящей через центр масс звена;
![]() – угловое ускорение звена.
– угловое ускорение звена.
Сила инерции звена направлена противоположно ускорению, а момент инерции ![]() в сторону обратную направлению углового ускорения.
в сторону обратную направлению углового ускорения.
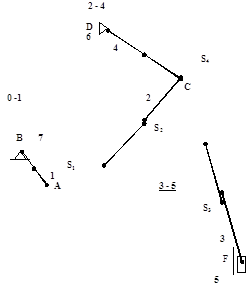
Делим механизм на группы Ассура. Таких групп три, и анализ следует начать с наиболее отдаленной группы – группы 4-5.
1.3.1 Силовой анализ группы 4-5
Из условия равновесия мы знаем, что сумма моментов относительно точки F будет равняться нулю, запишем уравнение:
![]()
Из данного уравнения можно легко найти неизвестную величину:
![]()
G4 = mEF*9,8 = 8*9,8 = 78,4
G5 = mF*9,8 = 11*9.8 = 107,8
Рп.с. = 120 Н
![]() = 284,8
= 284,8
![]() = 382,8
= 382,8
![]() = 456
= 456
![]()
![]() = 1,0488
= 1,0488
Имея все перечисленные данные можем высчитать:
![]() = (-284,8*0,0035)+(78,4*0,0495)+1,0488/0,05= =78,656
= (-284,8*0,0035)+(78,4*0,0495)+1,0488/0,05= =78,656
Для построения силового многоугольника выберем масштабный коэффициент, составим векторное уравнение и согласно данным получим силовой многоугольник:
mF = G5/PFG5=6 (Н/мм)
Значит при перенесении сил на план силы к длине вектора будут соотносится по принципу в 1 мм – 6 Н
| Сила | Сила, Н | Длинна отрезка, мм |
|
| 284,8 | 47,5 |
|
| 382,8 | 63,8 |
| G4 | 78,4 | 13 |
| G5 | 107,8 | 18 |
| Рп.с. | 120 | 20 |
|
| 78,656 | 13 |
Строим план сил в соответствии с уравнением:
Рп.с.+ ![]() + G4+ G5+
+ G4+ G5+![]() +
+![]() +
+![]() +
+![]() =0
=0
Построив все известные силы проведем на силовом многоугольнике ![]() перпендикулярно
перпендикулярно ![]() (так как нормальная и тангенциальная составляющая ускорения всегда взаимоперпендикулярны), и проведем также
(так как нормальная и тангенциальная составляющая ускорения всегда взаимоперпендикулярны), и проведем также ![]() , которая замкнет многоугольник.
, которая замкнет многоугольник.
На пересечении ![]() и
и ![]() получим точку , в которую будет входить вектор
получим точку , в которую будет входить вектор ![]() .
.
Далее, измеряв длину всех искомых отрезков выполним процедуру обратного перевода величин:
![]() = 38,5мм = 231Н
= 38,5мм = 231Н
![]() = 2 мм = 24 Н
= 2 мм = 24 Н
![]() = 41 мм = 246 Н
= 41 мм = 246 Н
Похожие работы

... Отсюда: H (1.48) Н.м (1.49) Полученные данные занесем в таблицу 1.4. Таблица 1.4 Fур, Н Мур, Н×м 28 0.7 2. ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими внешними усилиями ...
... напряжений; 4) определить размеры детали и округлить их до ближайших стандартных, согласно которым будет производится подбор сечений. 2.1 Выбор расчетной схемы В результате динамического анализа плоского рычажного механизма были определены внешние силы, которые действуют на каждое звено и кинематическую пару. Проектный расчет на прочность будем производить для группы Ассура 2-4 данного ...
... 74 R05 24.4 0,005 G4 14,7 Fi4 7.02 R04 7.6 G5 24,5 Fi5 8.125 Fур 0,197 2 ПРОЕКТНЫЙ РАСЧЕТ МЕХАНИЗМА НА ПРОЧНОСТЬ В результате динамического анализа плоского рычажного механизма были определены внешние силы, действующие на каждое звено и кинематическую пару. Этими ...
... H 14 23,4 22 R, H 14 24,2 11,8 1 22,2 2. Расчет элементов кинематических пар на прочность. 2.1. Определение внешних сил, действующих на звенья. В результате динамического анализа плоского рычажного механизма определены внешние силы, действующие на звенья и кинематические пары. Такими внешними усилиями являются силы инерции F , моменты инерции M , а также реакции ...
0 комментариев