Анализ конструкции
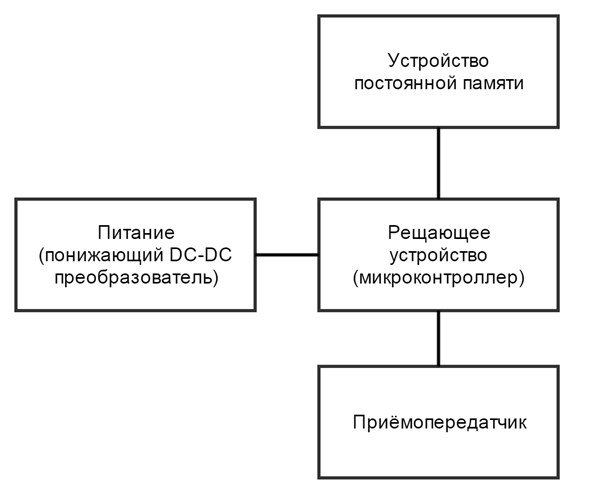
Описание функциональной схемы системы
Скоростная буферная память
Накопитель
РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ
Контроллер обмена с USB каналом
Исходные данные на проектирование разрабатываемой системы
ЭКОНОМИЧЕСКИЕ РАСЧЕТЫ
Расчет затрат на комплектующие системы и полуфабрикаты (покупные)
Расчет заработной платы производственных рабочих
Амортизационные отчисления
Навигация
Анализ конструкции
Анализ алгоритма работы специализированного вычислителя
71535
знаков
17
таблиц
16
изображений
1.3 Анализ конструкции
Разрабатываемая конструкция предназначена для сохранения в процессе натурных испытаний специализированного вычислителя информации. Блок должен быть совместим как механически, так и электрически с ячейкой специализированного вычислителя АЦП-079-03 и встраиваться в уже готовое изделие А-079, либо А-079-01. На рисунке 1.2 представлен эскиз ячейки специализированного вычислителя АЦП-079-03.
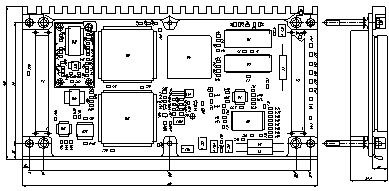
Рисунок 1.2 – Эскиз ячейки специализированного вычислителя АЦП-079-03
Ячейка АЦП-079-03 состоит из многослойной печатной платы размером 180´90 мм, шести фиксированных точек, через которые при помощи винтов осуществляется крепление ячейки, и двух сигнальных разъемов Х1 и Х2 – типа ESQT-130-02-G-Q-368 с направляющими ATS-30-Q.
В таблицах 1.5 и 1.6 представлены контакты разъемов Х1, Х2 и соответствующие им сигналы.
Таблица 1.5 – Разъем Х1
| Контакт | Цепь | Контакт | Цепь | Контакт | Цепь |
| 1 | Корпус | 9 | ГД12 | 17 | ТМ НРВ |
| 2 | Корпус | 10 | ГД1 | 18 | УПР АРУ |
| 3 | Корпус | 11 | ГД2 | 19 | УПР АР |
| 4 | Корпус | 12 | - | 20 | ТМ АР |
| 5 | ГД13 | 13 | Корпус | 21 | ТМ АРУ |
| 6 | ГД0 | 14 | Корпус | 22 | - |
| 7 | - | 15 | Корпус | 23 | - |
| 8 | - | 16 | Корпус | 24 | - |
| 25 | Корпус | 51 | Корпус | 77 | Корпус |
| 26 | Корпус | 52 | Корпус | 78 | Корпус |
| 27 | Корпус | 53 | ТМ Видео 2 | 79 | Корпус |
| 28 | Корпус | 54 | INITM5 | 80 | Корпус |
| 29 | ГД15 | 55 | INITM4 | 81 | Импульс мод. 1 |
| 30 | ГД3 | 56 | ТМ Видео 1 | 22 | Импульс мод. 2 |
| 31 | ГД4 | 57 | INITM2 | 23 | ВИ1 |
| 32 | ГД11 | 58 | INITM3 | 84 | ВИ2 |
| 33 | ГД7 | 59 | INITM1 | 85 | Корпус |
| 34 | ГД14 | 60 | INITM0 | 86 | Корпус |
| 35 | ГД5 | 61 | Корпус | 87 | Корпус |
| 36 | ГД10 | 62 | Корпус | 88 | Корпус |
| 37 | Корпус | 63 | Корпус | 89 | ГД8 |
| 38 | Корпус | 64 | Корпус | 80 | ГД6 |
| 39 | Корпус | 65 | Сброс КО | 91 | ГД9 |
| 40 | Корпус | 66 | Запись | 92 | - |
| 41 | ТМХ1 | 67 | - | 93 | Корпус |
| 42 | ТМХ2 | 68 | - | 94 | Корпус |
| 43 | ТМХ3 | 69 | А3 | 95 | Корпус |
| 44 | ТМХ4 | 70 | 10МНZ | 96 | Корпус |
| 45 | Моделиро-вание | 71 | - | 97 | ИЗ2 |
| 46 | - | 72 | - | 38 | КАПРМ |
| 47 | ТМХ5 | 73 | А1 | 99 | Мод. АМ |
| 48 | ТМХ0 | 74 | А2 | 100 | Резерв |
| 49 | Корпус | 75 | Выход КО | 101 | ФМ2 |
| 50 | Корпус | 76 | Чтение | 102 | ФМ1 |
| 103 | КАПП | 109 | ИЗ1 | 115 | КЧ2 |
| 104 | ВСК | 110 | КАПРМ1 | 116 | КЧ1 |
| 105 | Корпус | 111 | КАПРМ2 | 117 | Корпус |
| 106 | Корпус | 112 | АМ | 118 | Корпус |
| 107 | Корпус | 113 | КЧ4 | 119 | Корпус |
| 108 | Корпус | 114 | КЧ3 | 120 | Корпус |
Таблица 1.6 – Разъем Х2
| Контакт | Цепь | Контакт | Цепь | Контакт | Цепь |
| 1 | Корпус | 19 | Корпус | 37 | D7 |
| 2 | Корпус | 20 | Корпус | 38 | K D2 |
| 3 | Корпус | 21 | D1 | 39 | AS |
| 4 | Корпус | 22 | Корпус | 40 | DS |
| 5 | WAIT | 23 | +5BI | 41 | K AS |
| 6 | Корпус | 24 | +5BI | 42 | K D1 |
| 7 | +15В | 25 | WRITE | 43 | K D7 |
| 8 | +15В | 26 | Корпус | 44 | D6 |
| 9 | - | 27 | Корпус | 45 | J2_TMS |
| 10 | Корпус | 28 | Корпус | 46 | J2_TCK |
| 11 | -15В | 29 | J1_TCK_KO | 47 | J2_TD0 |
| 12 | -15В | 30 | J1_TDO_KO | 48 | J2_TDI |
| 13 | D5 | 31 | J1_TDI_KO | 49 | +5B |
| 14 | Корпус | 32 | J1_TMS_KO | 50 | +5B |
| 15 | -5BI | 33 | D4 | 51 | +5B |
| 16 | -5BI | 34 | D3 | 52 | +5B |
| 17 | CPU_INIT | 35 | D0 | 53 | Корпус |
| 18 | Корпус | 36 | D2 | 54 | Корпус |
| 55 | Корпус | 78 | LN6 | 100 | REZ_RAZ2 |
| 56 | Корпус | 79 | K D3 | 101 | Корпус |
| 58 | J1_TD0 | 80 | K D0 | 102 | Корпус |
| 59 | J1_TDI | 81 | LN7 | 103 | Корпус |
| 60 | J1_TMS | 82 | LN1 | 104 | Корпус |
| 61 | LN12 | 83 | - | 105 | +3.3B |
| 62 | - | 84 | ТД2 | 106 | +3.3B |
| 63 | K D5 | 85 | LN5 | 107 | +3.3B |
| 64 | K DS | 86 | LN4 | 108 | +3.3B |
| 65 | LN8 | 87 | RY/BY KO | 109 | +3.3B |
| 66 | LN11 | 88 | - | 110 | +3.3B |
| 67 | - | 89 | K WAIT | 111 | +3.3B |
| 68 | +5.5 B II | 90 | - | 112 | +3.3B |
| 69 | LN0 | 91 | K D6 | 113 | Корпус |
| 70 | LN9 | 92 | ТД3 | 114 | Корпус |
| 71 | - | 93 | K WRITE | 115 | Корпус |
| 72 | 5.5 B общ. | 94 | - | 116 | Корпус |
| 73 | LN10 | 95 | - | 117 | - |
| 74 | LN2 | 96 | - | 118 | ТД |
| 75 | - | 97 | K D4 | 119 | ТД |
| 76 | -5.5 B II | 98 | ТД4 | 120 | Корпус |
| 77 | LN3 | 99 | REZ_RAZ1 |
Электрическое соединение разрабатываемой системы с платой АЦП-079-03 будет осуществляться при помощи этих разъемов (Х1, Х2).
Входными сигналами системы регистрации данных являются:
- шины питания (может использоваться вся номенклатура питающих напряжений);
- последовательный байтный порт микропроцессора LINK (LN0 – LN12).
Исходя из анализа цепей в соединителях Х1 и Х2 получаем, что все требуемые сигналы находятся на разъеме Х2, следовательно разъем Х1 будет использоваться только для дублирования цепей корпуса и в качестве механического соединителя. В таблице 1.6 приведены контакты разъема Х2 разрабатываемой ячейки и сигналы соответствующие им, которые предполагается использовать для связи с ячейкой АЦП-079-03.
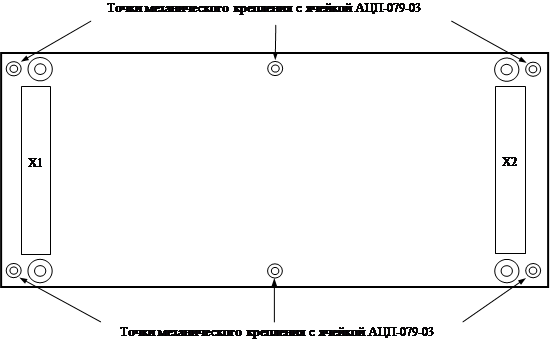 Так как разрабатываемая ячейка будет использоваться в составе специализированного вычислителя необходимо обеспечить дополнительное механическое крепление. Следовательно нужно обеспечить совместимость системы регистрации данных и ячейки АЦП-079-03 по местам механического крепления. Для осуществления механического крепления ячеек в составе изделия необходимо использовать крепеж (болты, домкраты) большей длинны.
Так как разрабатываемая ячейка будет использоваться в составе специализированного вычислителя необходимо обеспечить дополнительное механическое крепление. Следовательно нужно обеспечить совместимость системы регистрации данных и ячейки АЦП-079-03 по местам механического крепления. Для осуществления механического крепления ячеек в составе изделия необходимо использовать крепеж (болты, домкраты) большей длинны.
Эскиз системы в составе специализированного вычислителя представлен на рисунке 1.3.

Рисунок 1.4 – Эскиз механического крепления системы в специализированном вычислителе.
2. РАЗРАБОТКА ФУНКЦИОНАЛЬНОЙ СХЕМЫ И ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ
Похожие работы
... является допустимым для устройства подобного рода. 5.3 Вывод В результате анализа параметров энергосбережения было выявлено то, что при реализации системы аутентификации пользователя транспортного средства нельзя обойтись без анализа энергопотребления системы и поиска путей уменьшения этого параметра. Изначально спроектированная система вызывала бы дискомфорт у пользователя за счёт излишне малого ...
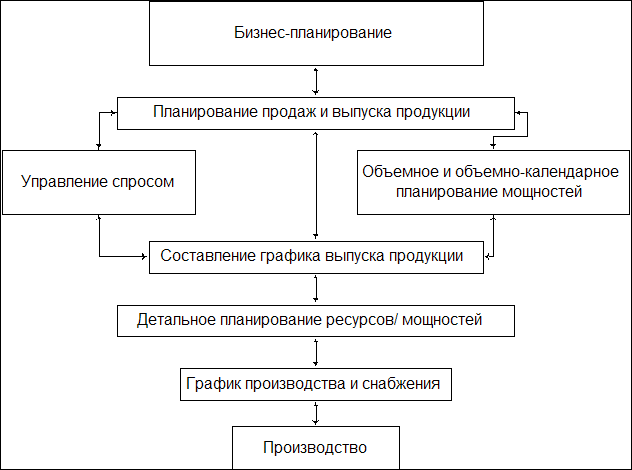
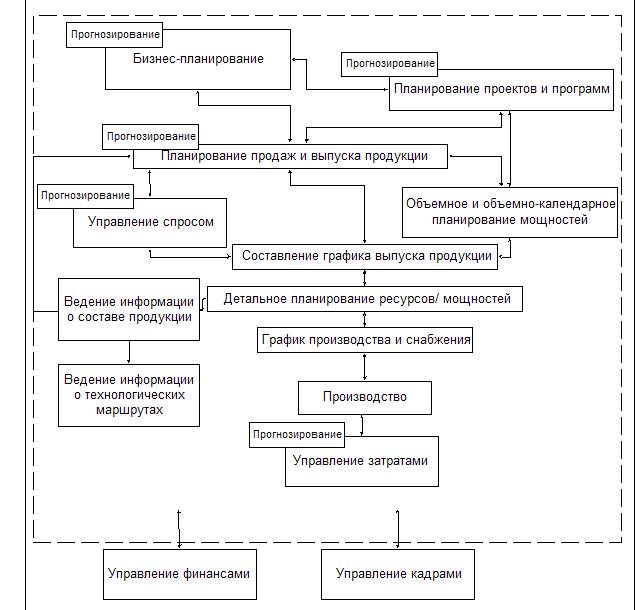
... ресурсов, снижение непроизводительных расходов и запасов, повышение производительности труда, качества продукции, внедрение новых форм управления и организации производства. 3. АВТОМАТИЗАЦИЯ РАБОТЫ ЭКОНОМИЧЕСКИХ СЛУЖБ НА ОАО “ВСЗ” 3.1. Построение автоматизированной системы планирования производственных ресурсов Необходимость планирования обусловлена тем, что основная масса задержек в ...
... средств является неприемлемой, т.к. жёсткая конкуренция на рынке транспортных услуг требует сокращения времени технического обслуживания до минимума. Скорость и надёжность проверки, во многом зависит от «человеческого фактора». Поэтому проверка функционирования системы улучшения устойчивости самолёта является довольно длительным, трудоёмким процессом, что приводит к лишним затратам труда и ...
... «Глонасс», кратко опишем одноканальную АП «АСН-37» для гражданских самолетов. Аппаратура «АСН-37» предназначена для автоматической работы в беспультовом варианте (без участия оператора) с комплексом цифрового пилотажно-навигационного оборудования самолета и использует весь объем данных о движении самолета от инерциальных систем, вырабатывая, в свою очередь, оценки плановых координат, высоты и ...
0 комментариев