Анализ технологического процесса как объекта управления
Классификация и перечень технологических переменных анализ взаимодействия между технологическими процессами
Разработка и выбор элементов АСУ ТП
Функциональная структура системы управления ТП описание функциональных блоков системы
Математическое моделирование системы управления технологическим процессом
Структура и параметрический синтез регуляторов системы управления ТП
Навигация
Структура и параметрический синтез регуляторов системы управления ТП
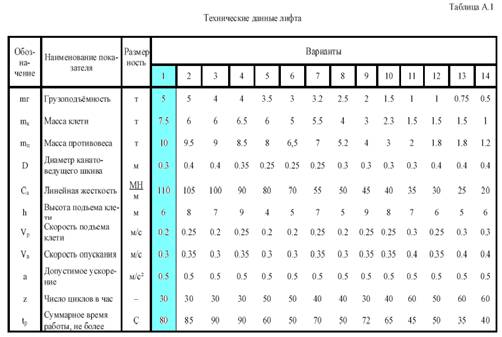
Автоматическая система управления процессом передвижения пассажирского лифта
48573
знака
1
таблица
19
изображений
3.2 Структура и параметрический синтез регуляторов системы управления ТП
Синтез регуляторов производился из стандартной методики настройки контуров на модульный или симметричный оптимум. Далее приведём лишь передаточные функции регуляторов и краткое описание контуров.
Контур тока.
Настройка контура тока проводилась на модульный оптимум с помощью ПИ-регулятора.
Передаточная функция ПИ-регулятора тока
 .
.
Коэффициент усиления регулятора тока:
 ,
,
где
коэффициент ОС по току.
![]() - коэффициент оптимизации.
- коэффициент оптимизации.
Постоянная времени регулятора тока:
![]()
Настройка контура близка к настройке на модульный оптимум (МО) системы 2-го порядка. Контур является астатической системой 1-го порядка по управлению.
Контур потокосцепления.
При оптимизации контура потокосцепления внутренний оптимизированный замкнутый контур тока представлен усеченной передаточной функцией 1-го порядка.
Передаточная функция ПИ-регулятора потокосцепления

Коэффициент усиления и постоянная времени регулятора потокосцепления определяются по выражениям

где
![]()
![]() - коэффициент оптимизации.
- коэффициент оптимизации.
Настройка контура близка к настройке на модульный оптимум системы второго порядка. Контур является астатической системой регулирования первого порядка по управлению и обеспечивает нулевую установившуюся ошибку ![]() .
.
Контур скорости.
При оптимизации контура скорости внутренний оптимизированный замкнутый контур тока представлен усеченной передаточной функцией 1-го порядка.
Передаточная функция ПИ-регулятора:

Коэффициент усиления и постоянная времени регулятора скорости определяются по выражениям:
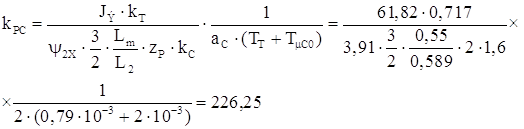
Оптимизированный контур при отработке ступенчатых управляющих воздействий обеспечивает высокое быстродействие при перерегулировании в общем случае более 43%. Настройка контура без фильтров на входе близка к настройке на СО.
Для ограничения перерегулирования на уровне около 8,1 % на входе контура скорости включены два одинаковых фильтра.
Нелинейная система.
Дальнейшее моделирование проводилось с учётом основных нелинейностей – насыщение регуляторов, ограниченное напряжение преобразователя.
К нелинейной системе для регулирования скорости предъявляются следующие требования:
Постоянная скорость вращения равная ![]() , что соответствует линейному движению кабины со скоростью
, что соответствует линейному движению кабины со скоростью ![]() .
.
Ограничение ускарения. Ускорение должно быть ![]() .
.
Чтобы выполнить выдвинутые требования необходим задатчик интенсивности, с помощью которого установим время разгона до рабочей скорости.
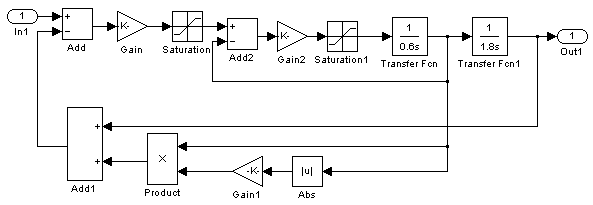
Рисунок 0.6 - Имитационная модель S-образного задатчика интенсивности в среде Simulink
Пусть время разгона будет 2,4 с.
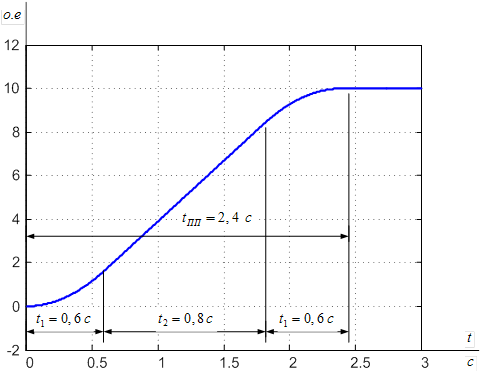
Рисунок 8 - – Переходная характеристика S-образного задатчика интенсивности.
Имитационная модель РЭП в среде Simulink представлена на рисунке 9. Переходные характеристики полученные при моделировании представлены на рисунке 10.
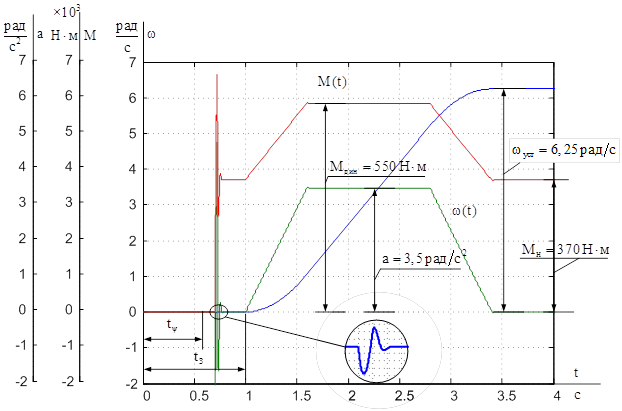
Рисунок 10 – Переходные характиристики нелинейной системы РЭП ![]() ,
, ![]() ,
, ![]()
Ускорение ограничено на уровне ![]() , что соответствует линейному ускорению
, что соответствует линейному ускорению ![]() .
.
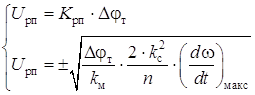
В САУ СЭП при использовании пропорционального регулятора в позиционных режимах наблюдается перерегулирование, что критично для управления позиционирования кабины лифта. С целью оптимизации переходных процессов применяют регулятор положения с нелинейной характеристикой. В простейшей схеме второго порядка с ограничением момента (тока) двигателя это парабола.
Параболический регулятор.
Характеристику регулятора положения задаем в виде кусочно-линейной функции имеющей параболический вид:

где

Определим точки линейного участка характеристики ![]() регулятора положения из выражения:
регулятора положения из выражения:
![]() ,
,
где ![]() - коэффициент усиления регулятора положения.
- коэффициент усиления регулятора положения.
Решая систему уравнений
,где n = 4, находим точку пересечения, где линейная характеристика регулятора переходит в плавное возрастание

Таблица 3 - Характеристика ![]()
| -10 | -8 | 6 | -4 | -2 | -0,855 | 0,855 | 2 | 4 | 6 | 8 | 10 |
| -1566,4 | -1002,5 | -563,9 | -250,6 | -62,7 | -11,5 | 11,5 | 62,7 | 250,6 | 563,9 | 1002,5 | 1566,4 |
Рассмотрим отработку задания на передвижение на расстояние пятого этажа в одномассовой механической системе. С учётом расстояния между этажами равным 3 метра, задание составит 15000. Полученные переходные характеристики представлены на рисунке 11.
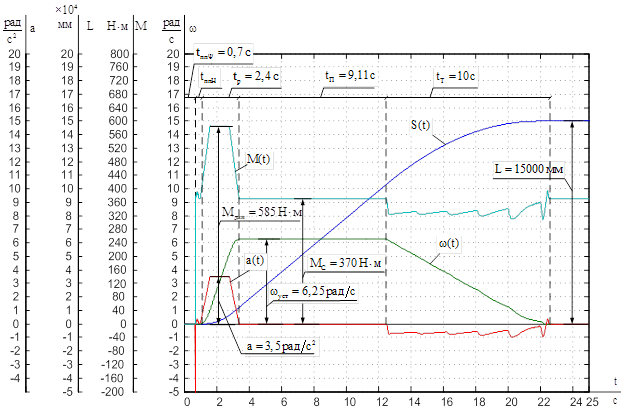
Рисунок 11 - Переходные характиристики нелинейной системы СЭП ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Затягивание скорости торможения вызвано работой параболического регулятора а также коррекцией интегрального насыщения в используемых нелинейных регуляторах. Переходный процесс по положению проходит без перерегулирования и статическая ошибка равна нулю.
3.3 Компьютерное моделирование алгоритмов управления. Графическое представление результатов моделирования
Для моделирования алгоритмов управления воспользуемся расширением MATLAB Simulink Stateflow. Данный пакет представляет собой графическую среду проектирования и моделирования схем с логическими переходами.

Рисунок 12 – Диалоговое окно приложения Statflow и модель алгоритма управления
Представленная модель работы системы позволяет управлять движением вниз(running_back), вверх(running_forward). При достижении заданного уровня отдавать сигнал открытия дверей(op). При начале движения производят закрытие дверей (cl).
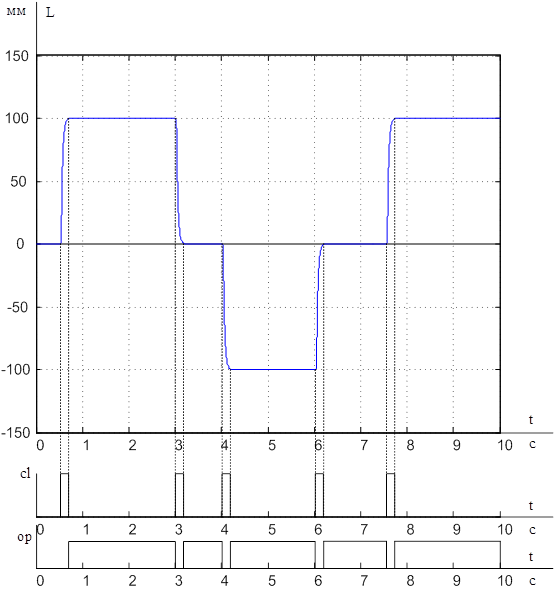
Рисунок 13 – Графическое представление работы системы управления
На рисунке 13 представлены результаты моделирования работы системы управления.
Разработанная система управления не осуществляет в полной мере все необходимы функции управления для передвижения пассажирским лифтом. В магистерской диссертации планируется продолжить работу над созданием системы управления, которая бы полностью могла управлять передвижением, включая все виды защит и переключение на пониженную скорость при срабатывании датчика остановки.
Заключение
В представленном курсовом проекте была спроектирована автоматизированная система управления передвижения пассажирского лифта.
Целью работы было получение начальных навыков проектирования автоматизированных систем управления электроприводов.
Разрабатываемая система управления позволит модернизировать устаревшие системы управления пассажирских лифтов и использовать данную систему во вновь строящихся зданиях. Также данная система построена на микропроцессорной системе управления, позволяющей значительно улучшить качество управления.
Система управления лифтовой лебёдки реализована на базе безредукторного асинхронного двигателя ЧРАД200S8 с векторным управлением.
В ходе выполнения работы были выбраны аппаратные средства на среднем и нижнем уровне управления. Произведёт выбор программного обеспечения для программирования логического контроллера и преобразователя частоты.
Литература
1. Антропов А.А., Гарганеев А.Г., Каракулов А.С., Ланграф С.В., Нечаев М.А. Опыт разработки преобразователя частоты для асинхронного электропривода общепромышленного применения//Электротехника. № 9. 2005. С.23-26
2. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392 с.
3. Белов М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: Учебник для вузов – М.: Академия, 2004. – 576 с.
4. Бесекерский В.А., Попов Е.В. Теория систем автоматического управления. Изд. 4-е, перераб. и доп. – СПб, Изд-во «Профессия», 2004. – 752с.
5. Ключев В.И. Теория электропривода: Учеб. для вузов. – 2-е изд.перераб.и доп. – М.: Энергоатомиздат, 2001. – 704 с.
6. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока/ Пер. с нем. М. Л.: Госэнергоиздат, 1963. 735 с.
7. Копылов И.П. Математическое моделирование электрических машин. – М.: Высшая школа, 2001. – 274 с.
8. Удут Л.С., Мальцева О.П., Кояин Н.В. Проектирование и исследование автоматизированных электроприводов. Часть 1. – Введение в технику регулирования линейных систем. Часть 2. – Оптимизация контура регулирования: Учебное пособие. – Томск: Изд. ТПУ, 2000. -144.
9. Удут Л.С., Мальцева О.П., Кояин Н.В. Проектирование и исследование автоматизированных электроприводов. Часть 6. – Механическая система электропривода постоянного тока: Учебное пособие. – Томск: Изд. ТПУ, 2004. -144с.
10. Чернышев А.Ю., Ланграф С.В., Чернышев И.А. Исследование систем скалярного частотного управления асинхронным двигателем: методические указания к выполнению лабораторных и практических работ по курсу "Электропривод переменного тока" для студентов специальности 180400. Томский политехнический университет. — Томск : Изд-во ТПУ, 2002. – 23 с.
11. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ.высш. учеб. заведений / И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков; под ред. И.Я. Браславского.– М.: Издательский центр «Академия», 2004. – 256с.
Похожие работы
... трапа (но не менее 600 мм); для вертикальных трапов—600 мм. Между площадками и трапами нельзя делать порогов, а также размещать в пределах площадок какие-либо предметы (рымы, органы управления системами, оборудованием), о которые можно споткнуться. Над площадками и маршами наклонных трапов по всей их длине и ширине в пределах высоты двух метров не допускается располагать какое-либо оборудование, ...

... операциях размещения и приема турецкой стороной при превышении плановых возможностей приема туристов со стороны прямого турецкого партнера ЧП "Аджунавиа-тур". Глава 3. Совершенствование системы управления международным туризмом чп "аджунавиа-тур" 3.1. Обоснование конкурентной привлекательности разработки нового туристического направления в деятельности ЧП "АДЖУНАВИА-ТУР" Настоящее и ...
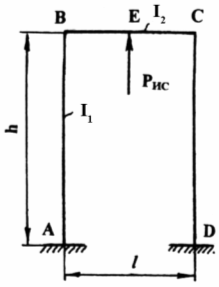
... в заделке (точка В) и момента в точке приложения нагрузки от канатной подвески (точка Е) (2.5) В реальных конструкциях лифтов величина Км ≥ 10, поэтому доля влияния моментов в узлах соединения балок со стойками очень мала, что делает вполне оправданным упрощенный расчет балок и стоек каркаса. 2.1.3 Устройство и расчет пола кабины Горизонтальная рама каркаса ...

... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
0 комментариев