Навигация
Управляючий контролер I-7188
15254
знака
0
таблиц
15
изображений
4.1 Управляючий контролер I-7188
Вбудований PC-сумісний контролер, з ROM-DOS, 512кб
Flash PC-сумісний контролер, що вбудовується з 7-сегментними індикаторами, ROM-DOS, 512кб Flash
Процесор: AMD 80188, 40МГц
Архітектура: PC-сумісна на рівні операційної системи
Оперативна пам'ять: 256кб
Енергонезалежна перепрограмувальна пам'ять:
Flash:512кб EEPROM даних: 1кб
Постійна пам'ять: 256кб
Операційна система: ROM-DOS, сумісна з MS DOS 6.2
Послідовні інтерфейси: 4 COM порти:
COM1: RS-232/RS-485, переключається перемичкою
COM2: RS-485
COM3: RS-232
COM4: RS-232
Цифрова індикація:
I-7188D/DOS: 5 розрядний 7-сегментний індикатор
Годинник реального часу: убудовані
Сторожовий таймер: убудований
Конструкція: пластиковий корпус, роз'ємні гвинтові клемні колодки для підключення зовнішніх сигналів, монтаж на панелі чи на DIN напрямну
Напруга живлення: +10В…+30В
Контролер легко програмується, має вбудований процесор 80188 (40 МГц, АМD), 256 Кбайт SRAM-пам'яті, 256 Кбайт флэш-пам'яті (170 Кбайт якої вільні для збереження прикладних програм), 4 послідовних порти, вбудовані годинник реального часу і подвійний сторожовий таймер. Опитуючи модулі і відповідаючи на запити від основного комп'ютера, контролери I-7188 забезпечують самостійне функціонування системи і можуть практично замінити основний комп'ютер чи PLC-пристрій у роботі з модулями. Наявність у контролера стандартних COM-портів (СОМ1 — повний RS-232, що переключається на RS-485; СОМ2 — двухпровідної RS-485; СОМ3 і СОМ4 — двухпровідної RS-232) дозволяє організувати взаємодію практично з будь-якими пристроями з послідовним інтерфейсом і створювати різні додатки з інтенсивним обміном даних по 4-м каналах зв'язку.
Локальний буфер даних для “ланцюжків” модулів, перетворювач інтерфейсів і форматів даних, сервер для декількох вилучених терміналів (дисплеї з Touch Screen чи MMI-CON), керування системою на будь-якій відстані по телефону — от трохи з численних прикладів застосування контролерів I-1788.
Конструктивно I-7188 має два варіанти виконання — зі світловим індикатором і без нього. Індикатор дозволяє користувачу виводити один рядок з п'яти символів.
ПО, встановлене в I-7188, містить операційну систему ROM-DOS, функціонально еквівалентну MS-DOS 6.0, що працює не з жорсткого, а з ROM (Read Only Memory) диска. Для збереження даних, необхідних при ініціалізації модуля, використовується 1 Кбайт EEPROM-пам'яті.
Прикладні програми для I-7188 можна створювати на будь-якому PC-сумісному комп'ютері, використовуючи загальнодоступні мови Сі, Сі++, Pascal чи Basic. Необхідно тільки при компіляції коду відключити підтримку інструкцій 286 процесора. Запис програми в Flash-пам'ять контролера I-7188 проходить за допомогою утиліти, що поставляється в комплекті з модулем, ROMDISK.EXE. У комплект постачання також входять 100 прикладів програмування і бібліотеки для Quick Basic, TC, MSC Language.
4.2 І-7060 модуль цифрового вводу/виводу з реле
Ліній дискретного вводу: 4 канали з гальванічною розв'язкою 3750В;
рівень логічного 0:0…+1В;
рівень логічної 1: +3.5В…+30В
Ліній дискретного виводу: 4 реле (2 двухконтактних, 2 трьохконтактних з перекидним контактом);
Параметри контактів:
AC: 125В @ 0.6А; 250В @ 0.3А
DC: 30В @ 2А; 110В @ 0.6А
Час замикання: 3 мс
Час розмикання: 1 мс
Загальний час переключення: 10 мс
Вхідний інтерфейс: RS-485 (двухпровідний)
Напруга ізоляції: 3750В
Конструкція: пластиковий корпус, роз’ємні гвинтові клемні колодки для підключення зовнішніх сигналів, монтаж на панелі чи на DIN напрямну
Напруга живлення: +10В…+30В
Споживана потужність: 0.8Вт
Умови експлуатації: -20°С…+70°С
Умови експлуатації: -20°С…+70°С
4.3 7017 - аналогові модулі вводу-виводу
8 канальний модуль аналогового вводу
Каналів аналогового вводу: 6 диференціальних / 2 із загальною землею або 8 диференціальних (вибирається перемикачем)
Розрядність АЦП: 16 біт
Частота виборок: 10Гц, смуга пропускання 15.72Гц
Діапазони вхідних напруг: +/-150мВ, +/-500мВ, +/-1В, +/-5В, +/-10В
Діапазон вхідних струмів: +/-20мА
Ізоляція: 3000В
Вхідний інтерфейс: RS-485 (двухпровідний)
Конструкція: пластиковий корпус, роз’ємні гвинтові клемні колодки для підключення зовнішніх сигналів, монтажну панелі або на DIN напрямну
Напруга живлення: +10…+30В
Споживана потужність: 2Вт
4.4Схеми підключення даних модулів
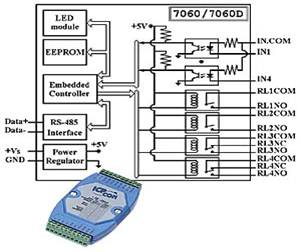
Підключення модуля І-7060.
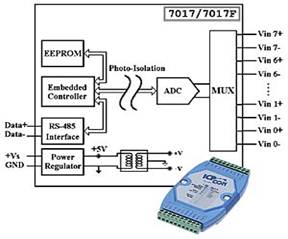
Підключення модуля І-7017

Підключення модулів до комп’ютера:
5. Надходження сигналів в АСКТП і їхня обробка. Спосіб реалізації керуючих впливів
Надходження сигналів і їх обробка здійснюється в запрограмованих каналах Scada системи Trace Mode.
В редакторі бази каналів ТМ створюється математична основа системи керування: описується конфігурація робочого контролера і пристроїв зв’язку з об’єктами, узгоджуються інформаційні потоки між ними. Тут же описуються вхідні і вихідні сигнали і їх зв’язок з пристроями збору даних і керування задаються періоди формування сигналів, настроюються закони первинної обробки технологічної інформації і керування, технологічні границі, структура математичної обробки даних.
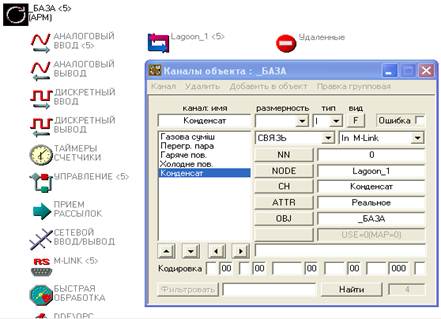
5.1 Розроблення бази каналів
Розроблена база каналів має вигляд:
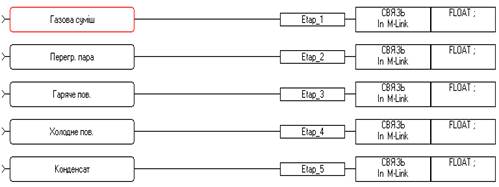
Вигляд бази каналів
5.2 Проектовання каналів
Розробка складних алгоритмів обробки інформації і керування в рамках ТМ здійснюється за допомогою мови функціональних блоків ( ТехноFBD ), яка реалізує міжнародний стандарт програмування контролерів МЭК-1131. Мова функціональних блоків є мовою візуального програмування, програма в якій розробляється шляхом розміщення стандартних чи розроблених користувачем функціональних блоків в полі редагування, настройка їх входів і виходів і зв’язків між ними в діаграму, яка реалізує бажані функцію обробки чи керування.
5.3 FBD-програми симуляції відкриття – закриття клапанів виконавчих механізмів
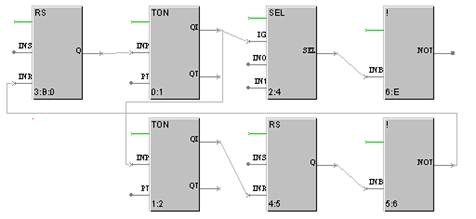
FBD-програма відкриття – закриття клапанів регулюючих органів подачі газової суміші і виходу збідненої газової суміші. .
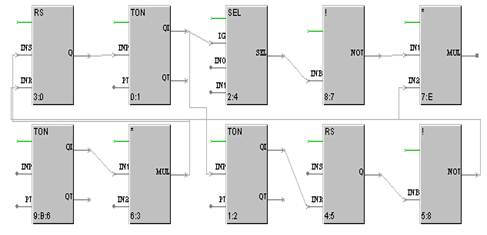
FBD-програма відкриття – закриття клапанів виконавчих механізмів:
· подачі перегрітої пари і виходу паро - газової суміші;
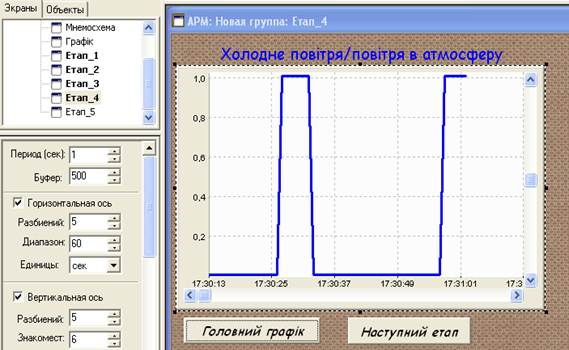
· подачі гарячого повітря і виходу повітря в атмосферу;
· подача холодного повітря і виходу повітря в атмосферу;
· вихід конденсату.
6. Розробка переліку задач АСКТП, способу їхньої реалізації і схеми
взаємодії цих задач
Задачі АСКТП які були поставлені, в даному проекті це регулювання почергового включення і виключення подачі потрібного компонента для виконання процесу адсорбції FBD - програми (показано вище), а також в редакторі представлення даних ТМ в якому створюється людино-машинний інтерфейс для автоматизованих робочих місць операторів і технологічного персоналу АСК ТП. Тут розроблена графічна частина проекту системи керування яка включає динамічну мнемосхему об’єкту керування, окремі вікна візуалізації параметрів технологічного процесу, керування клапанами.
Динамічна мнемосхема об’єкта керування з основними параметрами технологічного процесу представлена далі:

Динамічна мнемосхема об’єкта керування.
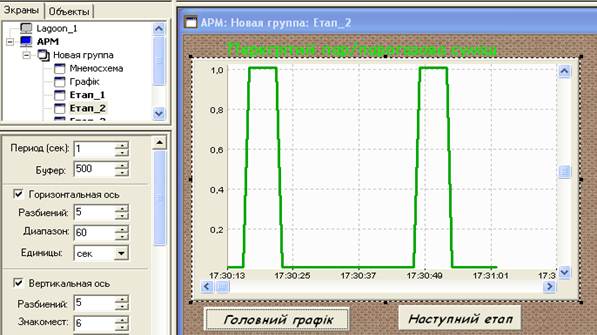
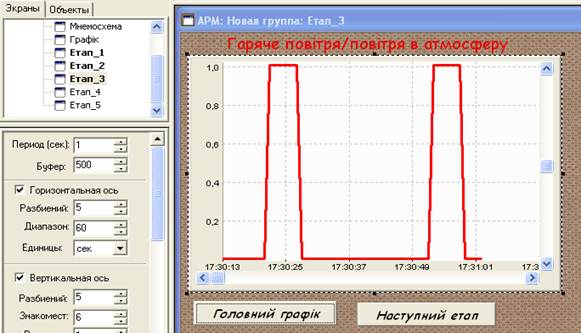
На інших малюнках представлені екрани з редактора представлення даних на яких зображені графіки технологічного процесу поетапно, а саме: операція адсорбції ,операція десорбції, операція сушки адсорбенту,операція охолодження адсорбенту,операція зливу конденсанта..

Екран регулювання відкриття – закриття клапанів регулюючих органів

Екран регулювання відкриття – закриття клапанів регулюючих органів при операції адсорбції
Екран регулювання відкриття – закриття клапанів регулюючих органів при операції десорбції
Екран регулювання відкриття – закриття клапанів регулюючих органів при операції сушки адсорбера
Екран регулювання відкриття – закриття клапанів регулюючих органів при операції охолодження адсорбента

Екран регулювання відкриття – закриття клапану регулюючого органу при операції зливу конденсата
Висновок
Розроблений проект АСКТП відстоювання в SCADA системі Trace Mode дає змогу повністю автоматизувати процес відстоювання рідин що мають грубодисперсні домішки, даний проект може використовуватись на станціях очистки стічних вод, на очисних спорудах заводів. Проект розроблений в SCADA системі Trace Mode дає змогу постійно слідкувати за процесом відстоювання при необхідності швидко вносити зміни, коригувати параметри. З економічної точки зору використання запропонованих мікропроцесорних систем є доцільним, з погляду на їх дешевизну, надійність і простоту в використанні.
Використана література
1. Шувалов В.В., Огаджанов Г.А., Голубятников В.А. Автоматизация производственных процессов в химической промышленности. – М.: Химия, 1991.
2. Артамонов В.В., Т.В. Вижевська Процеси і апарати технології водоочистки: Навч. посібник.- Рівне: Рівненський державний технічний університет, 1999 – 127с.:іл.
3. Кравченко В.С. Водопостачання і водовідведення: Навч. посідбник. – Рівне: Українська державна академія водного господарства, 1997. 237с.:іл.
4. Трегубенко Н.С. Водоснабжение и водоотведение: Примеры расчетов: Учеб. пособие для строит. вузов. – М.: Высшая школа. 1989. 352с. ил.
5. Смирнов Д. Н. Автоматическое регулирование процессов очистки сточных вод. М., Стройиздат, 1974. 256 с.
6. Попкович Г.С. Гордеев М.А. Автоматизация систем водоснабжения и водоотведения: учебник для вузов М., Высшая школа 1986. 391
7. Блюмин А.А. Эгильский И.С. Автоматизированные системы управления технологическими процессами городского водоснабжения. М., 1978
Похожие работы



... і токсичних промислових відходів та небезпечних речовин; розвиток науково-дослідних робіт з екологічної тематики; удосконалення еколого-пропагандистської діяльності. Крім того піднесенню ефективності управління природоохоронною справою на державному та регіональному рівнях у найближчій перспективі сприятиме: запровадження екологічного аудиту; запровадження ...
0 комментариев