Навигация
80 KEY(1) ON
ON KEY(1) GOSUB 90
KEY(5) ON
ON KEY(5) GOSUB 300
GOTO 80
Полностью законченная программа представлена в приложении 4.
Задачу можно дальше усложнять, заставив цель двигаться, маневрировать, вводить дополнительные параметры, которые реальней отражают происходящее, физические процессы. Но такая цель в данной работе не преследуется.
ЗаключениеВ предложенной к рассмотрению работе были показаны возможности языка программирования БЕЙСИК по решению математических уравнений описывающих физические явления. В работе не ставилась задача изучить в полном объеме язык БЕЙСИК, но переходя от простых решений, к более сложным, наглядно продемонстрирована возможность решения сложных задач с использованием графики, что в значительной степени способствует пониманию происходящих процессов.
Необходимо подчеркнуть, что пользователь работая на компьютере рано или поздно сталкивается с желанием самостоятельно написать программу, в которой можно было бы, в реальном масштаба времени, наблюдать и воздействовать на какие-то процессы. Это довольно сложный и кропотливый труд. Но первый шаг сделан в этой работе.
Важно отметить, что на многие практические исследования необходимо затратить определенное количество материальных средств, а создав электронную модель и воплотив ее в компьютерной программе обеспечивается значительная экономия средств. При этом, в решение таких задач следует учитывать случайный фактор, который может в значительной мере сказываться на реальных результатах. Но и это можно учесть используя законы теории вероятности.
Таким образом, берясь за решение какой – либо задачи, следует помнить, что при некотором напряжении мысли, логическом анализе и упорстве можно даже самую сложную задачу разбить на последовательность простых шагов, которые потом легко преобразовать в компьютерную программу.
Список литературыДж. Радер., К. Миллсап. Бейсик для персонального компьютера фирмы IBM: Пер. с англ. – М.: Радио и связь, 1991. – 30 л.: ил.
Р. Мкдона. Основы микрокомпьютерных вычислений: Пер. с англ./ Т.Г.Никольской; Под ред. В. Ф. Шальгина. – М.: Высш. Школа., 1989. – 272 с.: ил.
Задачи и упражнения по программированию: Практ. Пособие для ПТУ/ Под ред. А. Я. Савельева. Кн. 2. Тяжелая промышленность и транспорт/ В.Е.Алексеев, А.С. Ваулин. – 2-е изд., доп. – М.: Высш. шк., 1989-112 с.: ил.
А. В. Перышкин., Е. М. Гутник. Физика. 10 кл.: «Учеб. для общеобразоват. учеб. заведений – М.: Дрофа, 2002.
И. Д. Помбрик, Н. А. Шевченко. Аэродинамика. Изд. третье, исправленное и дополненное. М., Военное издательство, 1972 – 96 с.: ДСП.
Г. И. Светозарова. ОСНОВЫ ПРИКЛАДНОЙ ИНФОРМАТИКИ. Раздел: Описание языка Турбо-Бейсик. Справочное пособие.
ПриложениеПриложение 1.
REM полет тела
REM построение координат
SCREEN 9:
x0 = 50
y0 = 300
x1 = 600
y1 = 100
x2 = 50
y2 = 300
REM координата Y
LINE (x0, y0)-(x0, y1), 12
LOCATE 18, 4: PRINT “10”
LOCATE 14, 4: PRINT “20”
LOCATE 10, 4: PRINT “30”
LINE (48, 245)-(52, 245), 11
LINE (48, 190)-(52, 190), 11
LINE (48, 135)-(52, 135), 11
REM координата X
LINE (x0, y0)-(x1, y0), 12
LOCATE 23, 19: PRINT “50”
LOCATE 23, 31: PRINT “100”
LOCATE 23, 44: PRINT “150”
LOCATE 23, 56: PRINT “200”
LOCATE 23, 69: PRINT “250”
LINE (150, 302)-(150, 298), 11
LINE (250, 302)-(250, 298), 11
LINE (350, 302)-(350, 298), 11
LINE (450, 302)-(450, 298), 11
LINE (550, 302)-(550, 298), 11
REM полет
v = 50
g = 9.8
a = 30
f = a * 3.14 / 180
100 q = 1
t = t + q
s = v * t * COS(f) * 2
h = (v * t * SIN(f) – (g * t ^ 2) / 2) * 5.5
LINE (x2, y2)-(x0 + s, y0 – h), 14
x2 = x0 + s
y2 = y0 – h
IF h < 0 THEN 200
GOTO 100
200 END
END
Приложение 2.
REM ЯДРО
5 INPUT « Ввести угол стрельбы от 5 до 80 град»; a
7 IF a < 5 THEN 10
IF a > 80 THEN 20
GOTO 40
10 INPUT « Угол должен быть >=5»; a
GOTO 7
20 INPUT « Угол должен быть <=80»; a
GOTO 7
40 INPUT « Ввести дальность до цели от 200 до 5000 м»; l
45 IF l < 200 THEN 50
IF l > 5000 THEN 60
GOTO 70
50 INPUT « Расстояние до цели должно быть >=200»; l
GOTO 45
60 INPUT « Расстояние до цели должно быть <=5000»; l
GOTO 45
70 INPUT « Для выстрела нажать F1»; enter
REM построение координат
SCREEN 9:
x0 = 50
y0 = 300
x1 = 600
y1 = 50
x2 = 50
y2 = 300
REM координата Y
LINE (x0, y0)-(x0, y1), 12
LOCATE 18, 4: PRINT “250”
LOCATE 14, 4: PRINT “500”
LOCATE 10, 4: PRINT “750”
LOCATE 6, 4: PRINT “1000”
LINE (48, 245)-(52, 245), 11
LINE (48, 190)-(52, 190), 11
LINE (48, 135)-(52, 135), 11
LINE (48, 80)-(52, 80), 11
REM координата X
LINE (x0, y0)-(x1, y0), 12
LOCATE 23, 19: PRINT “1000”
LOCATE 23, 31: PRINT “2000”
LOCATE 23, 44: PRINT “3000”
LOCATE 23, 56: PRINT “4000”
LOCATE 23, 69: PRINT “5000”
LINE (150, 302)-(150, 298), 11
LINE (250, 302)-(250, 298), 11
LINE (350, 302)-(350, 298), 11
LINE (450, 302)-(450, 298), 11
LINE (550, 302)-(550, 298), 11
REM ЦЕЛЬ
LINE (x0 + l / 10, 299)-(x0 + l / 10 + 5, 299), 10
LINE (x0 + l / 10, 298)-(x0 + l / 10 + 5, 298), 10
80 KEY(1) ON
ON KEY(1) GOSUB 90
GOTO 80
REM полет
90 v = 200
g = 9.8
f = a * 3.14 / 180
100 q = .0005
t = t + q
s = v * t * COS(f) * 2
h = (v * t * SIN(f) – (g * t ^ 2) / 2) * 5.5
LINE (x2, y2)-(x0 + s / 20, y0 – h / 25), 14
x2 = x0 + s / 20
y2 = y0 – h / 25
IF h < 0 THEN 200
GOTO 100
200 REM взрыв
r = 30
n = 500
REM: a угол разлета
REM: r радиус разлета, n количество осколков
REM: коэффициенты 0.5 и 1 определяют ширину и высоту разлета
DIM x(n), y(n)
RANDOMIZE (TIMER)
FOR i = 1 TO n
a = -6.28 * RND / 2
rn = r * RND
xc = x2 + rn * .5 * COS(a)
yc = y2 + rn * 1 * SIN(a)
PSET (xc, yc), 9 + 9 * RND
PRESET (x(i), y(i))
NEXT
END
Приложение 3
REM ЯДРО
5 INPUT " Ввести угол стрельбы от 5 до 80 град"; a
7 IF a < 5 THEN 10
IF a > 80 THEN 20
GOTO 40
10 INPUT " Угол должен быть >=5"; a
GOTO 7
20 INPUT " Угол должен быть <=80"; a
GOTO 7
40 INPUT " Ввести дальность до цели от 200 до 5000 м"; l
45 IF l < 200 THEN 50
IF l > 5000 THEN 60
GOTO 70
50 INPUT " Расстояние до цели должно быть >=200"; l
GOTO 45
60 INPUT " Расстояние до цели должно быть <=5000"; l
GOTO 45
70 INPUT " Для выстрела нажать F1"; enter
REM построение координат
SCREEN 9:
x0 = 50
y0 = 300
x1 = 600
y1 = 50
x2 = 50
y2 = 300
REM координата Y
LINE (x0, y0)-(x0, y1), 12
LOCATE 18, 4: PRINT "250"
LOCATE 14, 4: PRINT "500"
LOCATE 10, 4: PRINT "750"
LOCATE 6, 4: PRINT "1000"
LINE (48, 245)-(52, 245), 11
LINE (48, 190)-(52, 190), 11
LINE (48, 135)-(52, 135), 11
LINE (48, 80)-(52, 80), 11
REM координата X
LINE (x0, y0)-(x1, y0), 12
LOCATE 23, 19: PRINT "1000"
LOCATE 23, 31: PRINT "2000"
LOCATE 23, 44: PRINT "3000"
LOCATE 23, 56: PRINT "4000"
LOCATE 23, 69: PRINT "5000"
LINE (150, 302)-(150, 298), 11
LINE (250, 302)-(250, 298), 11
LINE (350, 302)-(350, 298), 11
LINE (450, 302)-(450, 298), 11
LINE (550, 302)-(550, 298), 11
REM ЦЕЛЬ
LINE (x0 + l / 10, 299)-(x0 + l / 10 + 5, 299), 10
LINE (x0 + l / 10, 298)-(x0 + l / 10 + 5, 298), 10
REM показания
LOCATE 1, 6: PRINT "V m/s"
LOCATE 2, 6: PRINT "H m"
LOCATE 2, 24: PRINT "S m"
LOCATE 1, 24: PRINT "T s"
80 KEY(1) ON
ON KEY(1) GOSUB 90
GOTO 80
REM полет
90 v = 200
g = 9.8
f = a * 3.14 / 180
100 q = .01
t = t + q
REM k коэффициент сопротивления воздуха
k = .016
vs = v * COS(f) - (k - k / (k + v * COS(f)))
vh = v * SIN(f) - (k - k / (k + v * SIN(f)))
s = vs * t * 2
h = (vh * t - (g * t ^ 2) / 2) * 5.5
v = SQR(vs ^ 2 + vh ^ 2)
LINE (x2, y2)-(x0 + s / 20, y0 - h / 25), 14
x2 = x0 + s / 20
y2 = y0 - h / 25
LOCATE 1, 12: PRINT v
LOCATE 2, 12: PRINT h / 5.5
LOCATE 2, 28: PRINT s / 2
LOCATE 1, 28: PRINT t
IF h < 0 THEN 200
GOTO 100
200 REM взрыв
r = 30
n = 500
REM: a угол разлета
REM: r радиус разлета, n количество осколков
REM: коэффициенты 0.5 и 1 определяют ширину и высоту разлета
DIM x(n), y(n)
RANDOMIZE (TIMER)
FOR i = 1 TO n
a = -6.28 * RND / 2
rn = r * RND
xc = x2 + rn * .5 * COS(a)
yc = y2 + rn * 1 * SIN(a)
PSET (xc, yc), 9 + 9 * RND
PRESET (x(i), y(i))
NEXT
END
Приложение 4
REM ЯДРО
5 INPUT " Ввести угол стрельбы от 5 до 80 град"; a
7 IF a < 5 THEN 10
IF a > 80 THEN 20
GOTO 40
10 INPUT " Угол должен быть >=5"; a
GOTO 7
20 INPUT " Угол должен быть <=80"; a
GOTO 7
40 INPUT " Ввести дальность до цели от 200 до 5000 м"; l
45 IF l < 200 THEN 50
IF l > 5000 THEN 60
GOTO 70
50 INPUT " Расстояние до цели должно быть >=200"; l
GOTO 45
60 INPUT " Расстояние до цели должно быть <=5000"; l
GOTO 45
70 INPUT " Для выстрела нажать F1"; enter
INPUT " Для увеличения угла стрельбы нажать F2 "; enter
INPUT " Для уменьшения угла стрельбы нажать F3 "; enter
INPUT " Для остановки решения задачи нажать F5 "; enter
REM построение координат
SCREEN 9:
COLOR 1, 7:
72 x0 = 50
y0 = 300
x1 = 600
y1 = 50
x2 = 50
y2 = 300
REM координата Y
LINE (x0, y0)-(x0, y1), 12
LOCATE 18, 4: PRINT "250"
LOCATE 14, 4: PRINT "500"
LOCATE 10, 4: PRINT "750"
LOCATE 6, 4: PRINT "1000"
LINE (48, 245)-(52, 245), 11
LINE (48, 190)-(52, 190), 11
LINE (48, 135)-(52, 135), 11
LINE (48, 80)-(52, 80), 11
REM координата X
LINE (x0, y0)-(x1, y0), 12
LOCATE 23, 19: PRINT "1000"
LOCATE 23, 31: PRINT "2000"
LOCATE 23, 44: PRINT "3000"
LOCATE 23, 56: PRINT "4000"
LOCATE 23, 69: PRINT "5000"
LINE (150, 302)-(150, 298), 11
LINE (250, 302)-(250, 298), 11
LINE (350, 302)-(350, 298), 11
LINE (450, 302)-(450, 298), 11
LINE (550, 302)-(550, 298), 11
REM ЦЕЛЬ
LINE (x0 + l / 10, 299)-(x0 + l / 10 + 5, 299), 10
LINE (x0 + l / 10, 298)-(x0 + l / 10 + 5, 298), 10
REM показания
REM a-угол стрельбы
LOCATE 1, 6: PRINT "V m/s"
LOCATE 2, 6: PRINT "H m"
LOCATE 2, 24: PRINT "S m"
LOCATE 1, 24: PRINT "T s"
LOCATE 1, 45: PRINT "а"
78 t = 0
n = 0
b = 0
80 KEY(1) ON
ON KEY(1) GOSUB 90
KEY(5) ON
ON KEY(5) GOSUB 300
GOTO 80
REM полет
90 v = 200
g = 9.8
f = a * 3.14 / 180
100 q = .01
t = t + q
REM k - коэффициент сопротивления воздуха
k = .016
vs = v * COS(f) - (k - k / (k + v * COS(f)))
vh = v * SIN(f) - (k - k / (k + v * SIN(f)))
s = vs * t * 2
h = (vh * t - (g * t ^ 2) / 2) * 5.5
v = SQR(vs ^ 2 + vh ^ 2)
LINE (x2, y2)-(x0 + s / 20, y0 - h / 25), 14
x2 = x0 + s / 20
y2 = y0 - h / 25
LOCATE 1, 12: PRINT v
LOCATE 2, 12: PRINT h / 5.5
LOCATE 2, 28: PRINT s / 2
LOCATE 1, 28: PRINT t
LOCATE 1, 46: PRINT a
IF h < 0 THEN 200
GOTO 100
200 REM взрыв
r = 20
n = 100
REM: b угол разлета
REM: r радиус разлета, n количество осколков
REM: коэффициенты 0.5 и 1 определяют ширину и высоту разлета
DIM x(n), y(n)
RANDOMIZE (TIMER)
FOR i = 1 TO n
b = -6.28 * RND / 2
rn = r * RND
xc = x2 + rn * .5 * COS(b)
yc = y2 + rn * 1 * SIN(b)
PSET (xc, yc), 9 + 9 * RND
PRESET (x(i), y(i))
NEXT
ERASE x, y
210 KEY(2) ON
ON KEY(2) GOSUB 220
KEY(3) ON
ON KEY(3) GOSUB 230
KEY(1) ON
ON KEY(1) GOSUB 72
GOTO 210
220 a = a + 1
LOCATE 1, 46: PRINT a
GOTO 210
230 a = a - 1
LOCATE 1, 46: PRINT a
GOTO 210
END
Похожие работы
... тенденция к снижению снаряда, то таймер 1 останавливается: If Label17.Caption < 150 Then Timer1.Interval = 0 Цель поражена (Рис.13). Рис.13 Заключение Таким образом, язык программирования Visual Basic, наглядно позволяет смоделировать физический процесс, получить конкретные результаты и навыки. Отличительной особенностью VB, является возможность работы его непосредственно в среде Windows, что ...

... Show UserForm14. Hide Следовательно, при ответе «Да» на данный вопрос балл засчитывается в нейротизм. Таким образом, я научилась работать в среде Visual Basic и создавать тестовую программу. Corel DRAW. Введение Corel DRAW является единственным графическим пакетом, позволяющим делать буквально все, начиная от рисования и заканчивая версткой и обработкой растровых изображений[4]. Отличие ...

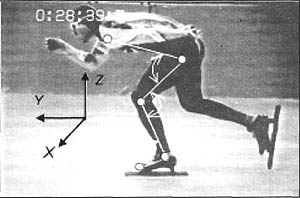
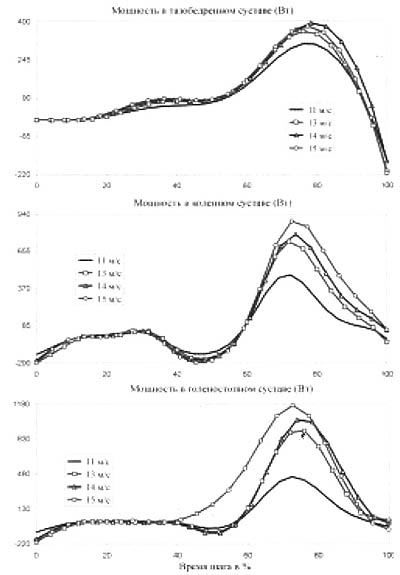
... влияет на конечный результат. Такая постановка имитационной задачи сводится к ответу на вопрос: "Что, если?". Имитационное моделирование в биомеханике . Метод имитационного моделирования применительно к биомеханическим задачам позволяет, не регистрируя кинематику и динамику двигательного действия, только по кинетограмме, созданной на компьютере: а) оценить [6, 41] максимальные усилия мышц; ...
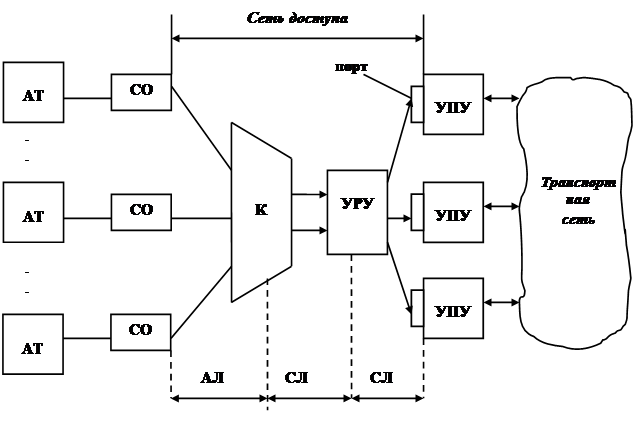
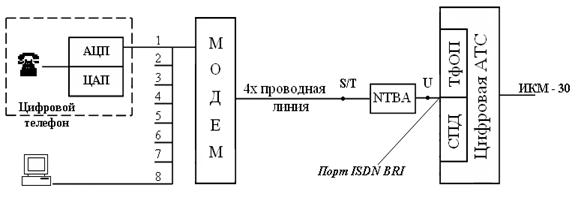
... своевременное распределение средств на развитие. Данными вопросами я и занимаюсь в настоящей дипломной работе. 4. Математическое моделирование Интернет - услуг 4.1 Математическое моделирование dial-up подключений Сначала рассмотрим моделирование услуги предоставления доступа в Интернет по dial-up, так как данная услуга является показателем потенциальных абонентов для монопольной услуги ...
0 комментариев