Навигация
Данные занести в таблицу
89077
знаков
4
таблицы
25
изображений
4. Данные занести в таблицу.
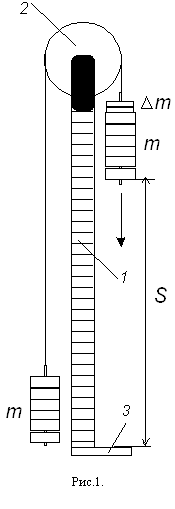
5. По полученным данным рассчитать величины скоростей равномерного движения системы для различных значений m и S1; найти значения квадратов этих скоростей.
6. Построить график зависимости квадрата скорости равномерного движения системы от величины пути S1 для различных значений массы дополнительных грузиков.
7. По графикам определить значения ускорений a1, a2, и a3, с которыми двигалась система на участке S1 для различных масс m1, m2, m3 дополнительных грузиков (учесть, что для равноускоренного движения выполняется соотношение (1.5). Результаты занести в таблицу.
8. Пользуясь данными таблицы, рассчитать ускорение свободного падения по формуле (53) для значений m1, m2, т3 и величин S1= 0,1м, S2=0,2м, S3= 0,3м.
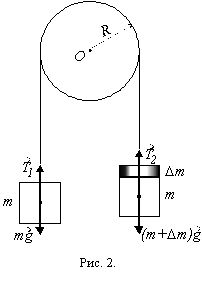
9. Рассчитать теоретически значения ускорения системы грузов по формуле (50) и сравнить с экспериментально полученными данными. При расчете использовать значение g = 9,8 м/с2. Объяснить расхождение теоретических и экспериментально наблюдаемых результатов.
10. Рассчитать погрешности определения ускорения свободного падения. Для расчета воспользуемся формулой (53), считая m, M точно известными величинами. Абсолютные погрешности измерения S и S1° считать равными 1 мм, а среднюю погрешность измерения времени рассчитать по данным таблицы.
Контрольные вопросы и задания1. Рассчитайте скорости системы грузов на равномерном участке их движения, используя закон сохранения энергии, и сравните результат расчета со значением скорости, полученным в эксперименте.
2. Что такое перемещение, скорость и ускорение материальной точки?
3. Что такое тангенциальное и нормальное ускорения? Какое ускорение вы измеряли в данной работе?
2. ИССЛЕДОВАНИЕ ЗАКОНА СОХРАНЕНИЙ ЭНЕРГИИ И ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛА С ПОМОЩЬЮ МАЯТНИКА МАКСВЕЛЛА
Цель работы
Определить экспериментально момент инерции тая вращения.
Приборы и принадлежности Маятник Максвелла.
Описание экспериментальной установки
Экспериментальная установка (рис. 13) собрана на основании I. На колонке 2 прикреплены неподвижный верхний кронштейн 3 и подвижный нижний кронштейн 4. На верхнем кронштейне находятся электромагнит 5, фотоэлектрический датчик 6 и вороток 7 для закрепления и регулирования длины бифилярной подвески маятника.
Нижний кронштейн вместе с фотоэлектрическим датчиком 8 можно перемещать вдоль колонки и фиксировать в произвольно выбранном положении.
Маятник прибора 9 - это ролик, закрепленный на оси и подвешенный по бифилярному способу. На ролик маятника накладываются сменные кольца 10, изменяющие таким образом момент инерции системы.
Маятник с насаженным кольцом удерживается в верхнем положении электромагнитом. Длина маятника определяется по миллиметровой шкале на колонке прибора. Для облегчения измерения длины маятника нижний кронштейн оснащен указателем, помещенным на высоте оптической оси нижнего фотоэлектрического датчика.
Пульт управления прибором 11, снабженный миллисекундомером, установлен на основании прибора 1.
Параметры маятника:
максимальная длина - 0,41 м;
количество сменных колец - 3 шт.;
массы сменных колец - m1, m2, m3 (указаны непосредственно на кольцах) или
![]()
где I - момент инерции маятника относительно оси 0 .
Решение этого уравнения дает период свободных колебаний маятника
 (75)
(75)
Из выражения (75) следует, что для нахождения ускорения g с помощью физического маятника необходимо измерить период колебаний T, массу маятника m, расстояние L0 и момент инерции I. Период T и масса m измеряются с большой точностью; точность определения величин I и L0 обычно невелика.
|
|

Точное значение ускорения силы тяжести можно найти посредством оборотного маятника - разновидности физического маятника. Достоинство рассматриваемого метода - возможность исключить величины I и L0 расчетной формулы для g .
Оборотный маятник (рис. 17) состоит из стального стержня Е, на котором укреплены опорные призмы А и С. Период колебаний маятника можно менять перемещением грузов В и D.
Во всяком физическом и, следовательно, оборотном маятнике можно найти такие две точки, что при последовательном закреплении маятника в той или другой точке период колебаний маятника остается неизменным. При равенстве периодов колебаний оборотного маятника при закреплении его призмами А и С (рис.17)
 (76)
(76)
где I1 и I2 - моменты инерции маятника относительно осей, проходящих через точки A и С : a1 a2 - расстояния от центра тяжести до соответствующих осей качания. На основании теоремы Штейнера:
I1=I0+ma12, I2=I0+ma22, (77)
где I0 - момент инерции маятника относительно оси, проходящей через его центр тяжести и параллельной оси качания.
Подставив (77) в (76) и исключив I0 и m, получим формулу для ускорения силы тяжести
![]()
Величина L=a1+a2 равна расстоянию между призмами и называется приведенной длиной физического маятника. Таким образом, для определения ускорения силы тяжести с помощью оборотного маятника необходимо измерить две величины; период колебаний Т и приведенную длину L физического маятника, измерить которую можно перераспределением масс маятника.
Порядок выполнения работы
1. Закрепить грузы В и D так, чтобы они находились на расстоянии 8-10 см от концов стержня.
2. Призму A закрепить в начале стержня, а призму С - на расстоянии 35-40 см от призмы A. По шкале, нанесенной на стержне, найти расстояние между призмами a1+a2.
3. Закрепить маятник на вкладыше верхнего кронштейна установки на призме A.
4. Нижний кронштейн установки переместить таким образом, чтобы стержень маятника пересекал оптическую ось фотоэлектрического датчика.
5. Отклонив маятник от положения равновесия на угол 4-5°, предоставить ему возможность совершать свободные колебания.
6. Нажать клавишу "Сброс".
7. После подсчета 10 полных колебаний нажать клавишу "Стоп".
8. По данным измерений количества периодов n и полного времени колебаний маятника t найти период
T=t/n
9. Для различных положений h груза D на стержне оборотного маятника Е рассчитать периоды колебаний маятника Тi в соответствии с пп. 5-8. При этом положение груза B остается постоянным.
10. Подвесить маятник на призму С.
11. Выполнить указание п. 4.
12. Определить периоды колебаний оборотного маятника для различных положений груза D на стержне Е в тех же пределах и с тем же числом измерений,
13. По данным таблицы построить на миллиметровой бумаге графики зависимостей периодов T1, и T2 от положения груза D на стержне. Точка пересечения кривых определит местонахождение подвижного груза D , при котором значения периодов будут равны (Т1=Т2 =T).
14. Для этого положения груза D в соответствии с пп. 5-8 найти период колебаний маятника относительно призм A и С. Полученные данные занести в таблицу.
15. Рассчитать по формуле (78) ускорение свободного падения.
Контрольные вопросы и задания
1. Что называется ускорением силы тяжести? Как оно направлено?
2. От чего зависит ускорение силы тяжести?
3. Что такое свободное падение тел?
4. Дайте определение физического маятника.
5. Выведите формулу для периода колебаний физического маятника.
6. Что такое приведенная длина физического маятника?
7. Дайте определение момента.инерции тела.
8. Чему равен момент инерции обруча, диска, шара и стержня . относительно центра масс?
9. Сформулируйте теорему Штейнера.
10. Выведите и сформулируйте основное уравнение динамики вращательного движения.
11. Выведите математическое выражение закона сохранения момента импульса.
12. Как определить направление момента силы и момента импульса?
4. ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДОГО ТЕЛА С ПОМОЩЬЮ КРУТИЛЬНОГО МАЯТНИКА
Цель работы
Определить моменты инерции твердого тела.
Приборы и принадлежности
Крутильный маятник, набор тел различной формы и массы.
Описание экспериментальной установки
К основанию крутильного маятника (рис.18) прикреплены миллисекундомер 2 и колонна 3. На последней с помощью прижимных винтов закреплены кронштейны 4-6. Кронштейны 4 и б имеют зажимы, служащие для .закрепления стальной проволоки, на которой подвешена рамка 7, а на кронштейне 5 находится стальная плита 8. На ней размещены фотоэлектрический датчик 9 и электромагнит 10. Конструкция рамки позволяет закреплять к ней тела различной формы 11. Эти тела крепятся в рамке подвижной планкой, а планка затягивается гайками на зажимных втулках.
Работа с прибором
1. Включить питающее напряжение нажатием клавиши "Сеть". При этом должны светиться лампочки фотоэлектрического датчика и индикатора секундомера.
2. Нажать клавишу "Сброс". Это вызывает зануление индикатора секундомера, генерирование сигнала разрешения на измерение и включение обмотки электромагнита.
3. Повернуть рамку прибора так, чтобы стрелка рамки была фиксирована электромагнитом.
4. Нажать клавишу "Пуск". Нажатие этой клавиши отключает электромагнит, рамка опускается и совершает крутильные колебания. Миллисекундомер при этом отсчитывает число и время колебаний.
5. После совершения рамкой определенного числа колебаний систему остановить нажатием кнопки "Стоп". Показания индикатора времени занести в таблицу. Время измеряется три раза при одном и том же числе колебаний.

6. Изменив момент инерции системы путем установки в рамку цилиндра или исследуемого тела, снова нажимаем клавишу "Сброс" и проводим измерения числа колебаний и времени по пп. 3-5.
С учетом данных (масса цилиндра т и диаметр d) рассчитывают момент инерции цилиндра 10.
Теоретическое введение
Момент силы, который действует на тело, закрепленное в крутильном маятнике,
![]()
где К - коэффициент жесткости нити подвеса, зависящий от материала нити и ее геометрических размеров - длины и диаметра. Знак "-" отражает противоположную направленность момента упругой силы нити и угла ее деформации. Записав основное уравнение динамики вращательного движения с учетом (79), получим
![]()
где I - момент инерции тела, совершающего крутильные колебания. Решая уравнение (80),найдем период колебаний
![]()
Если вращающееся тело - составное (рамка с закрепленным в ней исследуемым телом), то I=Ip+Im, где Ip, Im - моменты инерции рамки и исследуемого тела соответственно. Поэтому период колебаний рамки с закрепленным в ней исследуемым телом
![]()
Из формулы (82) следует, что для нахождения момента инерции тела Im измеренной величине Т2 необходимо знать момент инерции рамки Ip и коэффициент жесткости нити подвеса к, т.е. нужны два дополнительных измерения:
I) определение периода колебаний 10 рамки прибора (без дополнительных грузов). В соответствии с (81)
II)
![]()
2) определение периода колебаний Т1 рамки прибора с закрепленным в ней талом, момент инерции которого известен. Например, цилиндр с моментом инерции I0=mr2/2, где m и r - масса и радиус цилиндра:
![]()
Решая совместно (83) и (84), находим величины - Iр и К по измеренным периодам колебаний T0 и T1. После подстановки значений Ip и К в (84) получаем:
![]()
Порядок выполнения работы
1. Определить периоды колебаний рамки T0 и рамки T1 с исследуемым телом. При выполнении работы необходимо измерить моменты инерции тела относительно его трех главных осей.
2. Данные занести в таблицу.
3. По полученным значениям определить по формуле (85) моменты инерции исследуемого тела относительно трех главных осей.
Контрольные вопросы и задания
1. Что такое момент инерции твердого тела? Какова размерность момента инерции в СИ?
2. Запишите основное уравнение динамики вращательного движения:
а) в дифференциальной форме; б) в проекции на неподвижную ось.
3. Чему равна угловая частота колебаний крутильного маятника?
4. Сформулируйте теорему Штейнера.
5. ИЗУЧЕНИЕ ОСНОВНОГО ЗАКОНА ДИНАМИКИ ЕРАЩАТЕПЬНОГО ДВИДЕНИЯ НА КРЕСТООБРАЗНОМ МАЯТНИКЕ ОБЕРБЕКА
Цель работы
Изучить основной закон динамики вращательного движения
Приборы и принадлежности
Маятник Обербека, набор грузов.
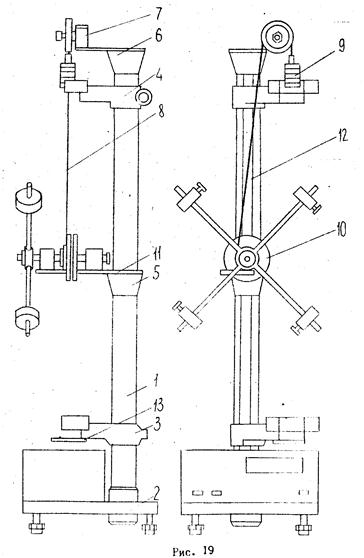
Описание экспериментальной установки
На вертикальной колонне 1 (рис. 19), установленной на основании 2, укреплены: кронштейны - нижний неподвижный 3 и верхний подвижный 4 и две неподвижные втулки – нижняя 5 и верхняя 6. На верхней втулке 6 закреплен подшипниковый узел диска 7. Через него перекидывается нить 8. На одном конце нити крепятся грузы 9, а второй конец фиксируется к двухступенчатому диску 10.
На нижней втулке 5 находится подставка II, к которой прикреплен тормозной электромагнит, удерживающий с пометой фрикционной муфты крестовину с грузом в состоянии покоя. Подвижной кронштейн 4 перемещается вдоль колонны и его можно фиксировать в любом положении, изменяя таким образом длину пути, проходимую грузами 9.
На колонну нанесена миллиметровая шкала 12. На подвижном 4 и неподвижном 3 кронштейнах закреплены фотоэлектрические датчики. дающие сигналы для измерения времени и включающие тормозной электромагнит, когда грузы достигнут резинового амортизатора 13, ограничивающего их движение. На основании прибора расположен миллисекундомер, фиксирующий время прохождения грузами определенного расстояния.
Работа с прибором
1. Закрепить (или снять) грузы на крестовине при отключенной питании прибора. Проверить правильность намотки нити на вращающийся двухступенчатый диск.
2. Поднять грузы 9 массой m (рис.19), вращая крестовину, на определенную высоту так, чтобы основание грузов совпадало с риской на верхнем фотоэлектрическом датчике.
3. Включить клавишу "Сеть". Отжать клавишу "Пуск". При этом включается блокирующее устройство и грузы фиксируются в первоначальном состоянии.
4. Включить клавишу "Пуск". При этом отключается электромагнит, фиксирующий систему грузов, и запускается миллисекундомер. Когда грузы пересекут луч второго фотокатода, отключается миллисекундомер и включается электромагнит, тормозящий движение грузов. Показания миллисекундомера занести в таблицу.
5. Нажать клавишу "Сброс". При этом очищается от показаний миллисекундомер и освобождается блокирующее устройство, позволяющее передвигать грузы в исходное положении.
6. Поднять грузы на определенную высоту в соответствии с п. 2, отжать клавишу "Пуск". Состояние грузов снова будет зафиксировано.
7. Нажать клавишу "Пуск". Повторить измерения времени движения грузов между верхним и нижним датчиками.
Порядок выполнения работы
Определение момента инерции крестовины.
1) Снять грузы с крестовины маятника. Измерить время движения груза массой m01. Повторить опыт три раза. Найти среднее значение времени падения груза. Повторить эксперимент, изменяя массу подвижных грузов (использовать грузы m01 = 54,5 г; m02 = 54,5 + 40 г, m03 = 54,5 + 40 + 239 г).
2) Определить ускорение, с которым двигался подвижный груз:
![]()
Высоту падения грузов измерить по шкале, укрепленной на колонне.
3) Найти угловое ускорение двуступенчатого диска
![]()
где r = 4,3 см - радиус большой ступени диска; r = 2,4 см - радиус малой ступени.
4) Вычислить момент сил, действующих на диск для трех значений: m01, т02, т03 по формуле:
M=m0(g-a)r2, (88)
5) Все данные измерений и вычислений занести в таблицу.
6) Построить зависимость М от E по полученным данным. По графику определить момент инерции I0 крестовины без грузов на ней.
Определение моментов инерции грузов
1. Установить четыре груза на расстоянии R от оси вращения крестовины (расстояние между насечками на крестовине 1 см). Измерения провести для трех значений R.
2. Определить момент инерции системы Ic; путем измерения времени падения грузов m0 при одном значении m0. Повторить опыт три раза, расчет ic выполнить по формуле:
![]()
3. Учитывая, что Ic = I0 + 4I2,0 найти Iгр для данного значения m0.
4. Установить грузы на другом расстоянии R от оси вращения. Повторить измерения Iс. Вычислить Iгр для нового значения R.
5. Повторить эксперименты, описанные в пп. 2-4, меняя расстояние R, Вычислить для каждого значения R моменты инерции Iгр.
6. Данные занести в таблицу.
7. Начертить график Iгр= f(R2).
8. Объяснить полученные результаты
Контрольные вопросы и задания
1. Что является мерой инертности тела при поступательном и вращательном движении?
2. Что называется моментом инерции тела относительно оси вращения? Назовите единицу измерения момента инерции.
3. Какие способы определения момента инерции тел вы знаете?
4. Сформулируйте теорему Штейнера.
5. Запишите основной закон вращательного движения.

6. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТОВ ТРЕНИЯ С ПОМОЩЬЮ НАКЛОННОГО МАЯТНИКА
Цель работы
Ознакомиться со сложным механическим движением; определить коэффициенты трения различных пар материалов.
Приборы и принадлежности
Наклонный маятник, набор пар трения - шариков и плоских поверхностей качения.
Описание экспериментальной установки
Наклонный маятник (рис.20) собран на платформе I, оснащенной регулировочными винтами, позволяющими устанавливать платформу в горизонтальном положении. На платформе закреплена поворотная штанга 2, положение, которой изменяется ручкой 3, а угол наклона β контролируется по шкале 4. Со штангой 2 посредством специального держателя жестко связана плоская полированная пластинка 5, являющаяся одним телом трущейся пары. В качестве второго тела в установка используются сменные шарики 6, подвешиваемые с помощью тонкой нити к пилону штанги 2. Отклонение шарика 6 от положения равновесия (угол α) измеряется по шкале.
Данный прибор допускает измерение коэффициентов трения скольжения для различных твердых трущихся пар. По известным значениям коэффициентов может быть определена сила трения
Fmp = f*N,
где f - коэффициент трения; N - сила нормального давления. Работа с прибором
1. Установить штангу маятника 2 в положение, соответствующее нулевое показанию индикатора угла наклона 4.
2. Проверить правильность установки прибора с помощью шарика, используемого в качестве отвеса. При правильном положении прибора угол отклонения шарика (α) должен быть равен нулю и шарик лишь слегка касается поверхности качения.
3. Откорректировать при необходимости положение прибора регулировочными винтами в платформе прибора.
4. Установить угол наклона штанги прибора β в пределах 50...60°.
Теоретическое введение

На шарик выведенный из положения равновесия, действуют следующие силы: тяжести (тg), натяжения нити (Т), реакции опоры (N) и трения (Fтр) (рис. 21). Под действием скатывающей силы, являющейся геометрической суммой указанных сил (Fck = mg + T + N + Fmp), шарик совершает колебательное движение. Наличие силы трения между шариком и поверхностью качения приводит к уменьшения амплитуды колебаний шарика во времени. Работа сил трения может быть представлена в виде
![]()
где Imp - сила трения, Imp =f*N; S - путь, пройденный шариком ![]() , f - коэффициент трения; N - сила реакции опоры; N = mg*sinβ; R - длина нити подвеса; α0 - начальный угол отклонения шарика; αn - конечный угол отклонения шарика; n - число полных колебаний, совершенных шариком при его движении.
, f - коэффициент трения; N - сила реакции опоры; N = mg*sinβ; R - длина нити подвеса; α0 - начальный угол отклонения шарика; αn - конечный угол отклонения шарика; n - число полных колебаний, совершенных шариком при его движении.
Вследствие работы сил трения уменьшается механическая энергия шарика. Убыль механической энергии численно равна работе сил трения:
W0-Wn=Amp, (91)
где W0,Wn - механическая энергия шарика в исходном и конечном состояниях.
В качестве начального и конечного состояний шарика наиболее удобно принимать положения его максимального отклонения, когда скорость движения шарика равна нулю, а механическая энергия численно равна потенциальной энергии шарика. В этом случае
Amp=П0-Пn=mg(h0-hn), (92)
где h0, hn - начальная и конечная высота подъема шарика. Высота подъема шарика может быть выражена через угол наклона штанги β, угол отклонения шарика от положения равновесия в плоскости колебаний α и длину нити подвеса (рис. 21)
h=Rcosβ(1-cosα), (93)
В этом случае выражение (92) принимает вид
Amp=mgRcosβ(cosαn-cosα0)=
=![]()
поскольку для малых углов (α≤5º![]() 0,09 рад) sinα
0,09 рад) sinα![]() α,
α,
то ![]()
Тогда ![]()
Сопоставляя соотношения (90) и (95), получаем выражение для коэффициента трения
![]()
где α0 и αn выражены в радианах. Поскольку шкала для измерения углов @@ про градуирована в градусах, то рабочий вид формулы (96) имеет вид:
![]()
где углы α0 и αn выражены в угловых градусах.
Порядок выполнения работы
1. Установить угол β наклона штанги прибора на 50...60°.
2. Отклонить шарик от положения равновесия на угол α0<= 5° с помощью вспомогательного предмета (карандаш, ручка).
3. Убрать вспомогательный предмет, представив возможность шарику свободно перемещаться.
4. Зафиксировать угол отклонения шарика от положения равновесия @n после 8-10 его полных колебаний.
5. Повторить измерения 3-4 раза и результаты занести в таблицу.
6. Найти среднее значение αn. Результаты внести в таблицу.
7. Найти среднюю ошибку измерения конечного угла отклонения. Результаты занести в таблицу.
в. Используя полученные данные, по формуле (97) определить величину коэффициента трения, результат записать в таблицу,
9. Увеличить угол наклона β штанги прибора на 5-10° и повторить измерения.
10. Сделать выводы.
Контрольные вопросы и задания
1. Что такое сила нормального давления? и. Запишите уравнение, связывающее силу трения с силой нормального давления.
3. Какие виде трения вы знаете?
4. Чем обусловлены силы трения?
5. В каких случаях силы трения играют положительную роль?
6. В каких случаях силы трения играют отрицательную роль?
7. Как можно изменить силу трения?
7. ОПРЕДЕЛЕНИЕ СКОРОСТИ ПОЛЕТА ТЕПА С ПОМОЩЬЮ БАЛЛИСТИЧЕСКОГО КРУТИЛЬНОГО МАЯТНИКА
Цель работы
Определить экспериментально скорости движения тела.
Приборы и принадлежности
Баллистический крутильный маятник.
Описание экспериментальной установки
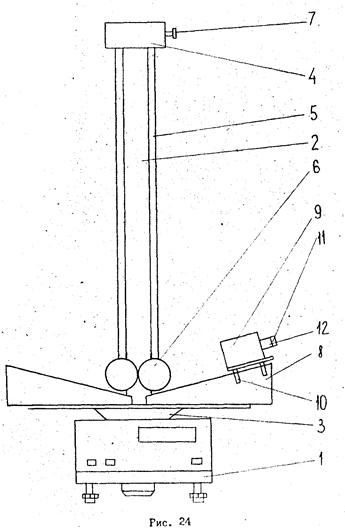
Общий вид баллистического маятника показан на рис.22.

В основании 1 установлена колонка 2, на которой закреплены верхний 3, нижний 4 и средний 5 кронштейны. К среднему кронштейну прикреплены стреляющее устройство 6, прозрачный экран с нанесенной на него угловой шкалой 7 и фотоэлектрический датчик 8.
Кронштейны 3 и 4 имеют зажимы, служащие для крепления стальной проволоки 9, на которой подвешен маятник. Маятник состоит из двух мисочек, наполненных пластилином 10, двух перемещаемых грузов 11, двух стержней 12 и водилки 13.
Блок управления прибором 14 размещен на основании 1.
Параметры маятника:
диапазон отклонения маятника от положения равновесия - 0-90°;
значение деления угловой шкалы - 1°;
масса каждого из грузов, перемещаемых по стержню маятника (указана непосредственно на грузах);
масса "снаряд" (указана на установке).
Работа с прибором
1. Включить шнур питания прибора в сеть и нажать клавишу "Сеть".
2. Проверить работу индикаторов и лампочек фотоэлектрического датчика: индикаторы электронного секундомера и счетчика числе колебаний (периодов) должны высвечивать "О" вс всех разрядах, а лампочке фотоэлектрического датчика светиться.
3. Если на индикаторах отсутствуют "О" во всех разрядах, то необходимо нажать клавишу "Сброс".
4. После нажатия клавиши "Сброс" счетчик периодов и электронный секундомер готовы к измерениям.
5. для окончания измерений следует нажать клавишу "Стоп".
П р и м е ч а н и е. После нажатая клавиши "Стоп" секундомер останавливается не мгновенно, а продолжает счет до окончания очередного периода колебаний.
Теоретическое введение
В основе экспериментального определения скорости полета тела с помощью баллистического маятника лежит закон сохранения момента импульса.
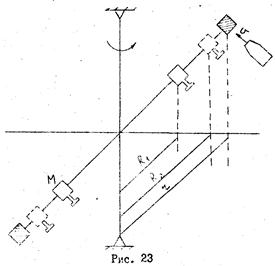
Если тело массой m движется со скоростью V в плоскости колебаний маятника (рис. 24), то момент импульса тела относительно оси маятника
L0=mVr,
где r - кратчайшее расстояние от оси маятника до траектории движения тела. Во время выстрела маятник покоится, т.е. момент импульса его равен нулю. После влипания тела в мисочку маятника последний вместе с телом приобретает начальную угловую скорость вращения w0.
Из закона сохранения момента импульса для системы тело - маятник следует, что
mV2=I1w0, (98)
где I1 - суммарный момент инерции маятника и тела относительно оси вращения. Маятник с угловой скоростью w0 и соответственно кинетической энергией ![]() начинает поворачиваться. При этом происходит закручивание подвеса (упругой нити) и возникает тормозящий момент. Поворот маятника прекращается, когда его кинетическая энергия вращения полностью перейдет в потенциальную энергию закрученной нити:
начинает поворачиваться. При этом происходит закручивание подвеса (упругой нити) и возникает тормозящий момент. Поворот маятника прекращается, когда его кинетическая энергия вращения полностью перейдет в потенциальную энергию закрученной нити:
![]()
где К - коефициент упругости нити; α0 максимальный угол закручивания маятника.
Решая совместно уравнения (98) и (99), находим
![]()
Дня определения скорости V из (100) необходимо знать величины К и I1. Для этого следует выполнить два дополнительных измерения, основанных на законах крутильных колебаний маятника.
Из второго закона динамики для вращательного движения следует
IE=M= - kα, (101)
где Е - угловое ускорение маятника; ![]() ;
; ![]() - угловая скорость маятника); М - тормозящий момент; α - угол поворота маятника.
- угловая скорость маятника); М - тормозящий момент; α - угол поворота маятника.
Таким образом, уравнение крутильных колебаний маятника (101) преобразуется к виду;
![]()
где ![]() - циклическая частота колебаний маятника). Решением уравнения (105) являются гармонические колебания с периодом
- циклическая частота колебаний маятника). Решением уравнения (105) являются гармонические колебания с периодом
![]()
Период колебания маятника можно найти экспериментально, причем период будет зависеть от момента инерции маятника и коэффициента упругости подвеса k.
Изменяя момент инерции маятника перемещением грузов массой М из положения R1, для которого момент инерции I1, в положение R2, для которого момент инерции I2, и определяя для этих моментов периоды T1 и T2, составляем систему уравнений (рис. 24):
![]()
![]()
где I0 – момент инерции системы без подвижных грузов;
I1= I0+2MR12; I2= I0+2MR22.
Решая систему (104), находим коэффициент упругости нити
![]()
и момент инерции
I1= I0+2MR1;
![]()
Подставляя значения К и I1 в выражение (100), определяем скорость полета тела
![]()
Порядок выполнения работы
1. Приблизить грузы, перемещаемые по стержням, к оси маятника на расстояние 4-5 см (R1).
2. Установить маятник в таком положении, чтобы черта на мисочке с пластилином совпадала с положением "О" на прозрачном экране.
3. Выстрелить тело из стреляющего устройства (первая зарядка тела в стреляющее устройство осуществляется при помощи преподавателя или лаборанта).
4. Измерить максимальный угол отклонения маятника α0.
5. Включить и обнулить счетчик времени и периодов.
6. Отклонить вручную маятник на угол α0, деблокировать измеритель времени (нажатием клавиши "Сброс") и отпустить маятник.
7. Измерить время десяти колебаний и вычислить период крутильных колебаний Т1.
8. Отдалить от оси подвижные грузы на расстояние 9-10 см (R2) и повторить действия согласно пп. 2, 5, 6 данного подраздела.
9. Измерить время десяти колебаний и вычислить величину Т1
10. Вычислить скорость полета тела по формуле (107).
11. Повторить опыт по определению скорости полета тела не менее трех раз.
12. Вычислить среднее значение скорости полета тела.
Контрольные вопросы и задания
1. Сформулируйте закон сохранения импульса.
2. Что такое момент силы?
3. Дайте определение момента инерции тела относительно неподвижной оси вращения.
4. Дайте определение момента импульса тела и сформулируйте закон сохранения момента импульса для замкнутой системы.
5. Запишите основное уравнение динамики вращательного движения.
6. Запишите формулу кинетической энергии тела, вращающегося вокруг неподвижной оси.
7. Запишите формулу работы при вращательном движении тела.
8. ОПРЕДЕЛЕНИЕ РАБОТЫ ДЕФОРМАЦИИ, КОЭФФИЦИЕНТА ВОССТАНОВЛЕНИЯ ВРЕМЕНИ И СИЛЫ ВЗАИМОДЕЙСТВИЯ ТЕЛ ПРИ УДАРЕ
Цель работы
Изучить законы сохранения энергии и импульса; определить экспериментально работу деформации, коэффициент восстановления, время и силу взаимодействия тел при ударе.
Приборы и принадлежности
Прибор для исследования столкновений шаров, комплект шаров. Понятие "удар" включает в себя совокупность явлений, возникающих при столкновении движущихся твердых тел, а также при некоторых взаимодействиях твердых тел с жидкостями и газами (гидравлический удар, взрыв и т.д.). Отличительная особенность данных физических явлений заключается в том, что время взаимодействия мало (10-4 - 10-6 с), а давление, возникающее в точках контакта соударяющихся тел или сред, достигает значений порядка 107 - 1088 Н/м2.
Описание экспериментальной установки
Общий вид прибора для исследования столкновения шаров показан на рис. 24. В основании I закреплена колонка 2, к которой прикреплены нижний 3 и верхний кронштейны 4. К верхнему кронштейну подведены провода 5 от шаров 6. Винт 7 позволяет изменять расстояние между шарами. На нижнем кронштейне укреплены угольники 8 с измерительными шкалами и электромагнит 9. После отвинчивания болтов 10 электромагнит можно передвигать вдоль первой шкалы и фиксировать высоту его установки. Сила притяжения электромагнита регулируется винтом 11, перемещающим сердечник 12.
При включении прибора в сеть и нажатии клавиши "Сеть" загорается цифровой индикатор. Для установки нулевых показаний необходимо сбросить измерительную схему нажатием клавиши "Сброс". Управление электромагнитом осуществляется клавишей "Пуск". При отжатой клавише "Пуск" включается электромагнит и шар, отведенный к магниту, удерживается в отклоненном положении. В этом положении по шкале измеряется начальный угол @@ отклонения нити от вертикального положения. При нажатии клавиши "Пуск", электромагнит отключается, шар под действием силы тяжести начинает перемещаться и, сталкиваясь с покоящимся шаром, вызывает его смещение. При этом нить второго шара отклоняется на угол @@, а первого на угол @@, величины которых зависят от упругих свойств материалов шаров. При столкновении шара с неподвижной стенкой, установленной вместо покоящегося шара, нить правого шара отклоняется на угол @@1.
Порядок выполнения работы
Измерение времени взаимодействия шаров и углов α, β, γ, γ1.
1) Измерить расстояния R от точки подвеса до центра даров и при необходимости отрегулировать их; эти расстояния должны быть равны. Массы шаров указаны на установке.
2) Включить источник питания нажатием клавиши "Сеть".
3) Отжать клавишу "Пуск" и отвести правый шар к электромагниту, измерить угол первоначального отклонения нити α от вертикального положения.
4) Нажать клавишу "Сброс".
5) Нажать клавишу "Пуск". Измерить углы максимальных отклонений от вертикального положения нитей левого шара β и правого γ после их взаимодействия. Зафиксировать по микросекундомеру время взаимодействия шаров. Измерения повторить 3-5 раз и подученные данные занести в таблицу.
6) Используя пары с различными упругими свойствами, выполнить исследования в соответствии с пп.1-5.
7) Заменить левый шар неподвижной стенкой и в соответствии с пп.3)-6) определить максимальный угол отклонения нити γ1 правого шара от вертикального положения после его взаимодействия со стенкой. Данные занести в таблицу.
Определение скоростей шаров
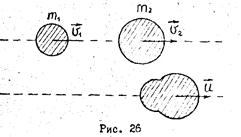
При абсолютно упругом столкновении шара массой m1, который двигаетcя со скоростью V1, с шаром массой m2, который двигается со скоростью V2 (V2<V1,рис.25), поверхности их деформируются, но этот процесс обратим, так как форма шаров мгновенно восстанавливается, а энергия деформации без потерь превращается в кинетическую энергию движения шаров.

После удара шары будут двигаться с измененными скоростями U1 и U2, определить которые можно с помощью законов сохранения кинетической энергии
![]()
и сохранения импульса (количества движения)
m1V1+m2V2=m1U1+m2U2, (109)
После несложных преобразований находят скорости шаров после удара
![]()
![]()
Если происходит встречный центральный абсолютно упругий удар (скорости шаров до удара имеют противоположные знаки), то необходимо учитывать знак скорости при вычислении соответствующих величин в выражениях (110), (111). При равенстве масс шаров (т1 = т2 = т) из (110) и (111) следует
U1=V2, U2=V1, (112)
т.е. первый шар приобрел после удара скорость, равную скорости второго шара, и наоборот. Если до столкновения один из шаров (например, второй) покоился (V2 = 0), то U1 = 0; U2 = V1).
После абсолютно неупругого удара тела совершают совместное движение (рис. 26), а кинетическая энергия соударяющихся тел частично переходит в другие виды энергии и тела приобретают остаточную деформацию. При этом закон сохранения механической энергии системы не выполняется. Скорость U' после удара, как известно, можно определить, используя закон сохранения импульса и считая, что внешние силы отсутствуют, а масса системы после удара - т1+ т2:
![]()
Если первоначально тело было поднято на высоту h1, то в момент удара его кинетическая энергия равна исходной потенциальной энергии (рис. 27):
![]() .
.

Скорости шаров после взаимодействия можно определить из условий
![]()
![]()
где h2 и h3 - высота подъемов второго и первого шара после взаимодействия.
Из этих соотношений следует
![]()
![]()
![]()
![]()
![]()
![]()
![]()
1) По измеренному значению угла α начального отклонения правого шара вычислить по формулам (114) и (116) его скорость U1 при прохождении им положения равновесия.
2) Определить теоретические значения скоростей шаров после взаимодействия для случаев абсолютно упругого удара (формулы (110), (111) и абсолютно неупругого удара (формула (113)).
3) По измеренным углам отклонения шаров после их взаимодействия (β и γ) вычислить по формулам (115), (116) действительные значения скоростей шаров.
4) Сравнить теоретические и экспериментальные значения скоростей, дать объяснение полученным результатам.
Определение работы деформации при ударе шаров
При неупругом ударе часть механической анергии тел переходит в другие формы энергии (например, тепловую) и затрачивается на работу о статочной, деформации поверхности шаров. В этом случае полная энергия системы не изменяется, кинетическая энергия шаров после удара будет меньше, чем до удара.
Уменьшение механической энергии системы ∆W с достаточной степенью точности можно считать равным работе сил, создающих остаточную деформацию.
По закону сохранения энергии при столкновении реальных тел следует учесть работу деформации тел A, т.е. ту часть общей энергии, которая необратимо расходуется на совершение невосстанавливающейся деформации и преобразуется в энергию теплового движения молекул вещества:
![]()
Это уравнение позволяет определить работу деформации шаров равных масс (m1 = m2 = m), закрепленных на нерастяжимых нитях длины R. Если второй шар покоится (V2 = 0), а первый - отклонен на угол α от вертикального положения (рис. 27), то (117) преобразуется к виду:
A=∆W=mg(h1-h2-h3), (118)
где h2 и h3 - высота подъема второго и первого шара после удара. С учетом (116)
A=mgR(cosβ+cosγ-cosα-1), (119)
1) Вычислить кинетическую энергию шара в момент удара по измеренному значению угла α первоначального отклонения первого шара.
2) По измеренным значениям углов α, β и γ и длины подвеса шаров R вычислить по формуле (119) изменение механической энергии системы - работу деформации.
Определение коэффициента восстановления тел при ударе
Степень "неупругости" удара определяется отношением нормальных составляющих скоростей тела после его удара о неподвижную стенку Un (после удара) и V1 (до удара). Это отношение называется коэффициентом восстановления:
![]()
В качестве неподвижной стенки можно использовать шар достаточно большой массы или любое плоское массивное тело. С учетом, что
![]()
где h3 - высота подъема шара после его удара о массивную неподвижную стенку, коэффициент восстановления
![]()
Используя связь высоты подъема шара с углом отклонения нити от положения равновесия, окончательно получаем
![]()
По измеренным значениям α и γ1 вычислить коэффициент восстановления E и результаты занести в таблицу.
Определение силы взаимодействия тел
Силу взаимодействия двух тел можно определить исходя из основного уравнения динамики Поступательного движения:
![]()
где F - средняя сила удара; ∆t - время взаимодействия соударяющихся тел; ∆V - изменение скорости тела, возникающее в результате удара.
Так как скорость первого шара после его столкновения с покоящимся шаром отлична от нуля и направлена в ту же сторону, что и скорость до удара, то ∆(mV) = mV1 - mU1 и, следовательно, сила взаимодействия шаров
![]()
С учетом (114)-(116) результат (123) преобразуется к виду
![]()
1) По измеренным значениям длины подвеса R, углов α и γ начального и конечного отклонений первого шара и времени взаимодействия шаров ∆t вычислить по формуле (124) силу взаимодействия шаров. Результаты занести в таблицу.
2) Предполагая, что площадь контакта взаимодействующих шаров составляет S = 0,1 мм, найти величину давления, действующего на стенку шара.
Контрольные вопросы и задания
1. Что называется ударом?
2. Какой удар называется абсолютно упругим? Приведите пример.
3..Какой удар называется абсолютно неупругим? Приведите пример.
4. Запилите закон сохранения анергии при ударе.
5. Выведите формулы для определения скорости шаров после абсолютно упругого и абсолютно неупругого ударов.
6. Запишите закон сохранения импульса при центральном ударе шаров.
7. Выполняется ли закон сохранения механической анергии при абсолютно неупругом ударе?
8. Выведите формулу для определения работы деформации тел при ударе.
9. ИЗУЧЕНИЕ ВЫНУЖДЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ
Цель работы
Исследовать явления резонанса и биений в колебательных механических системах.
Приборы и принадлежности
Прибор для изучения колебаний связанных систем.
Описание экспериментальной установки
На основании 1 установки (рис. 28) смонтирован блок управления и измерений 2, в котором находится электродвигатель. На валу электродвигателя закреплен ведущий стержень 3, движения которого возбуждают колебания механической системы. На колонке 4 закреплен кронштейн с фотоэлектрическим датчиком 5 и измерительной шкалой 6. Связанная система представляет собой маятник 8 с грузом 7 и стержень 9, жестко скрепленный скобой 10 со стержнем 3. Связь между маятником и стержнем осуществляется П-образной скобой 11, снабженной пружинами 12.
Колебания возбуждаются вращением электродвигателя. Последний, перемещая стержень 3, связанный скобой 10 и пружинами 12 с маятником 8, приводит маятник в состояние колебаний. Все стержни закреплены на подвесках 13,.установленных на неподвижной общей оси 14.
Порядок выполнения работы
Определение собственной частоты колебаний маятника.
Собственная частота колебаний маятника в основном зависит от параметров (длины, массы и формы закрепленного груза, жесткости и места закрепления пружин) и незначительно - от амплитуды колебаний, если она невелика.
* На выполнение работы запланировано четыре академических часа.

Последовательность выполнения:
1) Включить прибор нажатием клавиши "Сеть" и убедиться в свечении индикатора.
2) Отклонить маятник на 5-10° от положения равновесия и отпустить его.
3) Нажать клавишу "Сброс".
4) После совершения 10-12 колебаний нажать клавишу ''Стоп". Измерительным блоком при этом фиксируется количество полных колебаний и их время.
В) Определить частоту собственных колебаний маятника
![]()
где n - число колебаний, t - время.
Изучение явления резонанса
Все реальные колебательные системы диссипативные. Энергия их механических колебаний постепенно расходуется на работу против сил трения, поэтому свободные колебания всегда затухают. В случае небольших скоростей движения силы, вызывающие затухание механических колебаний, пропорциональны величине скорости. Таким образом, при отсутствии внешней силы на маятник будут действовать две силы: упругая, пропорциональная величине смещения маятника из положения равновесия, и сила трения, пропорциональная скорости движения маятника. Уравнение движения маятника
![]()
где m - масса маятника; x - координата, характеризующая положение маятника (угол); r - коэффициент сопротивления; К - коэффициент упругости.
Решение (126) показывает, что собственно колебания маятника являются затухающими:
![]()
где β - коэффициент затухания, ![]()
![]() ; w* - собственная циклическая частота колебаний диссипативной системы,
; w* - собственная циклическая частота колебаний диссипативной системы, ![]() ;
;
![]()
w0 - частота собственных колебаний маятника при отсутствии сил трения в системе,
Если коэффициент затухания мал (β<<w0), то
Таким образом, затухающие колебания можно рассматривать как колебания с постоянными частотой w* и периодом
![]()
амплитуда которых уменьшается со временем по экспоненте (рис. 29)
![]()

Как следует из формулы (130) и рис. 30, затухание колебаний увеличивается с ростом величины β.
Для характеристики затухающих колебаний вводится кроме коэффициента затухания β логарифмический декремент затухания δ, равный натуральному логарифму отношения двух амплитуд колебаний, отстоящих друг от друга на период колебаний:
![]()
Если на маятник, кроме упругой силы и силы трения, действует еще внешняя периодическая сила, то уравнения движения
![]()
где F0 - амплитудное значений вынуждающей силы; w - угловая частота внешней силы.
Решение этого уравнения приводит к следующим выражениям для величины смещения x , сдвига фаз φ и амплитуды колебаний А0:
x=A0sin(wt+φ); (133)
![]()
![]()
![]()
Если затухание мало, то при приближении частоты внешнего воздействия к собственной частоте амплитуда колебаний резко возрастает. Это явление называется резонансом. При частоте
амплитуда вынужденных колебаний имеет наибольшее значение. Чем меньше коэффициент затухания, тем более резко выражено явление резонанса (рис. 30).
По мере возрастания коэффициента затухания β явление резонанса проявляется все слабее и, наконец, исчезает при
![]()
Если затухание невелико (β и w0), то резонансная частота

Сравнивая уравнения (128) и (137), отметим, что wрез < w*,
где w* - собственная частота колебаний диссипативной системы.
При этом
![]()
По сдвигу резонансной частоты wрез относительно w* можно определить коэффициент затухания
![]()
учитывая, что ![]()
![]() где f* и fрез – линейные частоты колебаний, получаем
где f* и fрез – линейные частоты колебаний, получаем
![]()
Последовательность выполнения:
1) Включить прибор нажатием клавиши "Сеть".
2) Вывести в крайнее левое положение потенциометр "Частота колебаний".
3) Включить двигатель тумблером "Включение двигателя".
4) Установить минимальную частоту колебаний стержня 3 потенциометром "Частота колебаний" (см. рис. 29).
5) Нажать клавишу "Сброс'', после подсчета прибором времени 10 колебаний стержня 4 нажать клавишу "Стоп".
6) Вычислить частоту колебаний вынуждающего стержня.
![]()
где n - число колебаний; t - время.
7) Записать амплитуду колебаний маятника.
8) Произвести измерения в соответствии с пп. 5)-7), увеличивая частоту оборотов двигателя потенциометром "Частота колебаний", Построить зависимость амплитуды колебаний маятника 8 от частоты вынуждающей силы (частоты колебаний стержней 3 и 4). Отметить на оси частот полученное значение собственной частоты колебаний маятника.
9) Определить значение резонансной частоты fрезпо данным графика. По найденным значениям резонансной частоты fрез и
Похожие работы
... самопроизвольно протекать не может, необходим подвод энергии извне. 2-й закон термодинамики с использованием понятия энтропии формулируется так: Все процессы в природе протекают в направлении увеличения энтропии, энтропия замкнутой системы не может самопроизвольно уменьшаться. В статистической физике энтропию связывают с термодинамической вероятностью состояния системы – с числом ...
... программного комплекса ведется на основании задания на дипломную работу, утвержденное приказом ректора Донбасской машиностроительной академии по ГОСТ 19.101-77. Тема дипломной работы – «Программно – методический комплекс для мультимедийного представления учебной информации». Спецчасть разработки – «Разработка программного обеспечения для интерфейса оболочки комплекса и примера информационного ...
... с учеником, в ходе которого обучаемый получает дополнительные сведения и глубже усваивает материал. Можно использовать как итоговый по темам, определяя уровень учащегося по усвоению основных естественнонаучных умений и овладению навыкам решения физических задач разного уровня сложности. Можно сконцентрировать внимание на умении решать разного уровня сложности-ступени задачи, включая задачи из ...
... процесс, предполагающий использование различных приемов в системе средств развивающего обучения и правильного стиля отношений между учителем и учащимися. §5. Приемы и средства активизации познавательной деятельности на уроках физики. Активизация познавательной деятельности учащихся должна начинаться с использования различных средств, обеспечивающих глубокое и полное усвоение учащимися материала, ...
0 комментариев