Навигация
4.3 Проектування зачеплення.
Приймаємо висоту зубця на кресленні №4 – 50 мм.
Визначимо масштабний коефіцієнт:
![]()
Визначимо графічні розміри геометричних параметрів:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
На кресленні №4 проводимо міжосьову відстань ![]() і отримуємо центри коліс, точки О1 та О2 , з яких проводимо кола радіусами
і отримуємо центри коліс, точки О1 та О2 , з яких проводимо кола радіусами ![]() . Проводимо загальну дотичну до основних кіл. Відмічаємо точки дотику А та В. Визначаємо теоретичну лінію зачеплення АВ. Проводимо початкові кола
. Проводимо загальну дотичну до основних кіл. Відмічаємо точки дотику А та В. Визначаємо теоретичну лінію зачеплення АВ. Проводимо початкові кола ![]() , вони повинні перетнутися в точці W, точці перетину лінії зачеплення і лінії центрів.
, вони повинні перетнутися в точці W, точці перетину лінії зачеплення і лінії центрів.
Проводимо кола радіусами ![]() . Відрізок AW ділимо на чотири частини і отримуємо точки 1, 2, 3, 4, які зносимо на коло
. Відрізок AW ділимо на чотири частини і отримуємо точки 1, 2, 3, 4, які зносимо на коло ![]() і отримуємо точки 1’,2’,3’,4’, з яких проводимо дотичні до кола і зносимо на відповідні дотичні відрізки W0, W1, W2, W3, W4 . З’єднуємо точки і отримуємо профіль зубця. Проводимо вісь симетрії S1/2 і по закону симетрії добудовуємо іншу сторону зубця. Потім округлюємо зубець радіусом округлення ρ. Аналогічно будуємо зубець і для другого колеса. Робимо шаблони і добудовуємо ще по два зубця.
і отримуємо точки 1’,2’,3’,4’, з яких проводимо дотичні до кола і зносимо на відповідні дотичні відрізки W0, W1, W2, W3, W4 . З’єднуємо точки і отримуємо профіль зубця. Проводимо вісь симетрії S1/2 і по закону симетрії добудовуємо іншу сторону зубця. Потім округлюємо зубець радіусом округлення ρ. Аналогічно будуємо зубець і для другого колеса. Робимо шаблони і добудовуємо ще по два зубця.
4.4 Визначаємо величини параметрів якості.
Визначаємо коефіцієнт перекриття:

![]()
де: ab – практична лінія зачеплення
Визначимо коефіцієнти відносного ковзання:

де: Х – відстань від точки А до точки зачеплення
U1,2 – передаточне відношення
Визначаємо передаточне відношення:
![]()
| Х мм | 0 | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 166 |
| λ1 | -∞ | -4,38 | -1,32 | -0,3 | 0,21 | 0,51 | 0,72 | 0,86 | 1 |
| λ2 | 1 | 0,81 | 0,57 | 0,23 | -0,26 | -1,06 | -2,54 | -6,31 | -∞ |
4.5 Проектування планетарної передачі.
4.5.1 Вихідні данні.
U1Н - -0,36 (передаточне відношення);
К - 3 (кількість сателітів).
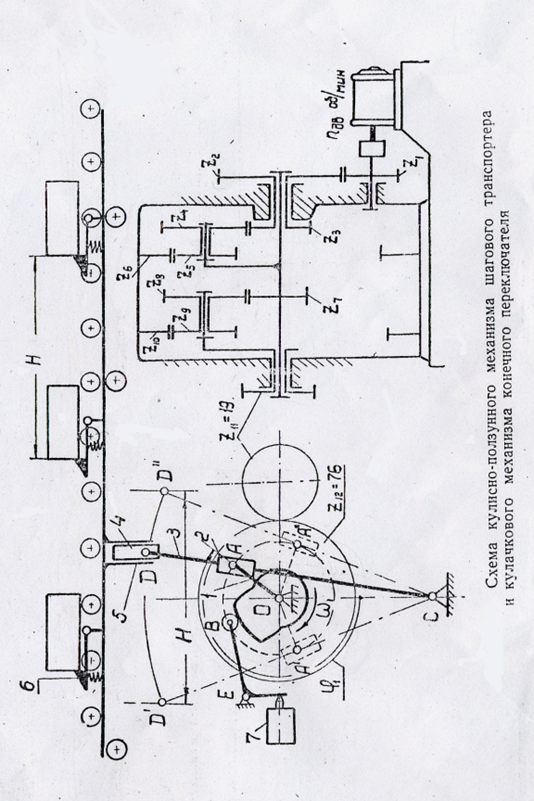
Схема механізму (мал.8)
Z2 Z3
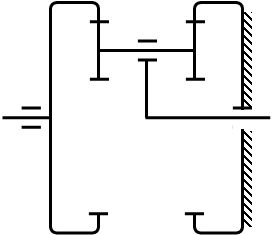
Z1 Z4
(мал. 8)
4.5.2 Розрахунок параметрів планетарної передачі.
Визначаємо кількість зубців:
![]()
![]()
![]()
![]()
![]()
Перевіряємо умову одноосності:
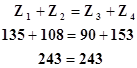
умова виконується
перевіряємо умову правильного зачеплення:
![]()
умова виконується
Перевіряємо умову сусідства:

умова виконується
Визначаємо діаметри ділильних кіл зубчастих коліс:
![]()
![]()
![]()
![]()
Визначаємо міжосьові відстані:
![]()
4.5.3 Побудова планів лінійних і кутових швидкостей.
Визначаємо масштабний коефіцієнт:
![]()
На кресленні №4 будуємо схему планетарного механізму у масштабі.
![]()
![]()
![]()
На схемі механізму відмічаємо точку А, полюс зачеплення коліс 1-2, точку В, та полюс зачеплення коліс 3-4. А також точку Н – центр колеса 3. Ці точки переносимо на базову лінію плану швидкостей.
Визначаємо лінійну швидкість точки А:
![]()
По горизонталі від базової лінії відкладаємо відрізок АА’.
Визначаємо масштабний коефіцієнт:
![]()
З’єднуємо точку А’ з полюсом Р, і отримуємо трикутник швидкості для колеса 1. З точки Н проводимо відрізок РН під кутом ΨН , отримуємо точку Н’ на перетині горизонталі проведеної з точки Н і відрізка Н’, з’єднавши яку з точкою А’ отримуємо трикутник швидкостей коліс 2 та 3.
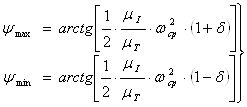
Визначаємо кут ΨН:
![]()
Проводимо горизонталь на відстані КР, довільно беремо полюс і через нього проводимо промені паралельно відрізкам А’Р, АВ, РН’. На перетині їх з горизонталлю отримуємо а1, а2,3, аН, що і є планом лінійних швидкостей. Відрізок Ка1 є графічним зображенням кутової швидкості колеса 1.
Визначаємо масштабний коефіцієнт:
![]()
Визначаємо кутову швидкість коліс 2,3 і водила Н:
![]()
![]()
5. Використана література.
1. Левітська О.Н., Левітський Н.И. «Курс теорії механізмів та машин», - М.: Висш. шк., 1985. – 279 с., іл.
2. Кореняко А.С. та ін., «Курсове проектування по теорії механізмів та машин», - К.: Вища шк., 1970. – 332 с.
3. Артоболевський .І.І., «Теорія механізмів та машин», - М.: Наука, 1988. – 640 с.
4. Методичні вказівки.
Похожие работы
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... аналогов скоростей рs2 , ps4. Положение механизма. 1 2 3 4 5 6 6’ 7 8 9 10 11 ps2 75 71 70 76 90 110 0 110 103 98 93 84 ps4 42 49 62 93 117 81 0 106 118 96 68 47 1.3 Динамический анализ механизма 1.3.1 Расчет и построение графика приведённого момента сил полезного сопротивления Рассчитаем значение приведённого момента сил полезного сопротивления для ...

... Прод. П/кр. Прод.. Гарантийный срок службы, ч 500 500 500 400 50 25цикл 10 Масса, кг 1,4 2,6 3,0 2,0 1,8 3,5 Технические характеристики Д-0,1 Д-0,16 А Д-5 Д-7 Д-25А Д-25-1С Д-40 Д-50А Д-55 Напряжение питания, В 2,8 4,5 27 27,5 27 27 27 27 27 Номинальный момент •10 4,Н · м 4,9 6,37 41,2 102 399 285 ...
0 комментариев