1. Опыт эксплуатации ПКП показывает, что система стабилизации ПКП является неотъемлемой частью ТС.
2. Применение систем автоматической стабилизации ПКП в горизонтальном положении позволит повысить безопасность ее движения, равномерно распределить нагрузки по опорам, упростить управление ПКП при движении и при проведении погрузочно-разгрузочных работ, упростить комплектацию многомодульных транспортных средств и, в конечном итоге, повысить эффективность использования ПКП.
3. Существующие САС ПКП обеспечивают стабилизацию поперечно-угловых колебаний в движении и равномерный подъем и опускание платформы при проведении погрузочно-разгрузочных работ. Информация о более сложных САС ПКП пока отсутствует. Использование САС подрессоренной массы других типов автомобилей неприемлемо по ряду конструктивных отличий ПКП и недостаточному алгоритмическому обеспечению САС. Задача создания САС ПКП является актуальной.
4. Невысокие технологические скорости движения ПКП при транспортировке грузов, близких по массе к максимально допустимой для ПКП, позволяет рассматривать задачу стабилизации ПКП в горизонтальном положении только при прямолинейном равномерном движении и при проведении погрузочно-разгрузочных работ.
2.4. Разработка функциональной схемы
Известные законы управления позволяют в общих чертах выяснить как надо реализовывать обратную связь между входными и выходными координатами ПКП как объекта управления. Для замыкания системы автоматической стабилизации необходимо снять информацию об угловом положении ПКП и о ее вертикальном положении и, обработав эту информацию по соответствующим законам, изменить расход жидкости в гидрогруппы, то есть законы управления определяют обратную связь как показано на рисунке 2.7.
Рис. 2.7. Структура САС, реализующая законы управления
УУ - управляющее устройство; ПКП - пневмоколесная платформа; h0 - заданная высота подъема платформы; Q - объемный расход жидкости; S - площадь силового гидроцилиндра; V - объем жидкости в гидрогруппах; a - поперечный крен платформы; j - продольный крен платформы; x - дорожное возмущение.
Обратную связь такого вида реализовать техническими устройствами невозможно. Во-первых, необходимо выяснить, как можно получить или измерить клиренс ПКП. Во-вторых, управление подачей жидкости в гидрогруппы осуществляется не непосредственно управляющим устройством, а через гидрораспределители. Последние являются сложным техническим объектом и включают в себя электронный усилитель, электромеханический преобразователь и гидроусилитель. Входная координата гидрораспределителя - напряжение в обмотке катушки электромеханического преобразователя, выходная координата - смещение золотника гидрораспределителя.
В качестве структуры гидропривода системы подвесок может быть выбрана схема регулирования объемно-дроссельного регулирования или дроссельного регулирования с постоянным давлением нагнетания. Регулирование второй схемы осуществляется более просто, к.п.д. у нее достаточно высок.
В системах стабилизации ПКП обычно используется один регулируемый насосный агрегат и блок гидрораспределителей. Регулируемым насосом и блоком гидрораспределителей можно управлять так, чтобы давление и расход насоса и расход жидкости в гидрораспределителях соответствовал необходимому расходу жидкости в гидросистемах подвесок. Такое управление гидроприводом достаточно сложное по сравнению со схемой гидропривода, часто используемой при работе насоса с несколькими гидрораспределителями. В последнем случае используется гидропривод с источником питания постоянного давления. Такой привод просто управляется и имеет достаточно высокий к.п.д. будем ориентироваться именно на такую структуру гидропривода.
Непосредственное измерение клиренса невозможно. Для его вычисления необходимо измерять либо ход каждой подвески с помощью поворотного потенциометрического датчика на рычаге подвески или датчика линейных перемещений, либо измерять уровень жидкости в гидробаке.
Таким образом, САС ПКП должна включать в себя датчики продольного и поперечного крена ПКП, датчик уровня жидкости в гидробаке или датчики хода всех подвесок, блок электрогидравлических распределителей, задатчик высоты подъема платформы и управляющее устройство. Взаимосвязь между ними дается законами управления. На основании этого можно составить блок-схему САС ПКП и описать принцип ее работы.
САС работает следующим образом. Перед движением ПКП оператор устанавливает задатчик высоты платформ, вмонтированный в пульте оператора, на заданной величине. Одновременно управляющее устройство приводит в действие соответствующий закон управления. Гидрораспределители подают в каждый цилиндр объем масла, пропорциональный входному напряжению. После выставки платформы в горизонтальном положении на заданном уровне ее высоты оператор приводит в движение платформу. При этом, однако, надо иметь в виду, что в движении может не хватить запасов мощности для одновременного подъема платформы и ее стабилизации. Поэтому такой режим работы нежелателен.
Раздел:
Радиоэлектроника Количество знаков с пробелами: 105355
Количество таблиц: 15
Количество изображений: 0
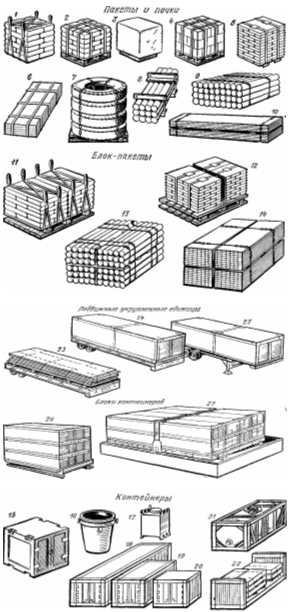
... навыки у докеров. 23. СИСТЕМА ОБЕСПЕЧЕНИЯ ПЕРЕГРУЗОЧНЫХ РАБОТ ТЕХНОЛОГИЧЕСКОЙ ОСНАСТКОЙ Система обеспечения оснасткой технологических процессов портовых перегрузочных работ включает: планирование поставки и производство механизмов и приспособлений; содержание их в исправном состоянии, т. е. регистрацию, освидетельствование с испытанием, периодические осмотры, техническое обслуживание и ...

0 комментариев