Навигация
4. Вибір АЦП і ЦАП
У відповідності з критеріями даної роботи розрядність АЦП має бути 8 біт, а ЦАП із визначеного вище – 8 біт. Критерієм вибору АЦП і ЦАП (крім розрядності) можуть бути наступні параметри:
час перетворення – визначається інтервалом часу від моменту досягнення вихідного сигналу до моменту подачі цифрового сигналу до моменту досягнення вихідним сигналом встановленого значення;
похибка перетворення – найбільше значення відхилення значення аналогового сигналу від розрахункового;
нелінійність – максимальне відхилення лінійно наростаючої напруги від прямої лінії, яка з’єднуєточку нуля і максимального вихідного сигналу.
4.1 Вибір АЦП
Перетворення аналогового сигналу в цифровий здійснюється за допомогою АЦП і представляє собою вимірювальний процес, який полягає в порівнянні аналогового сигналу з еталонною напругою, значення якої відомо наперед з великою точністю. В результаті цього непнрервне значення сигналу замінюється найближчим еталонним значення напруги, іншими словами, відбувається процес квантування по рівню.
Відомості про АЦП, які можуть бути використані в даній курсовій роботі, зведені в таблиці 4.1:
Таблиця 4.1
| Мікросхема | Вид перетвореня | Час пере t, мкс | К-ть вихо-дів | Похиб | Диф. неліній-ність, % | Абс. похибка перетво-рень, % | Розрядність |
| К572ПВ3 К1107ПВ4 К1107ПВ2 К1113ПВ1 | Послідовних наближень Однократний відлік Однократний відлік Послідовних наближень | 7,5 30 100 30 | 18 64 64 18 | 0,5;0,5 0,5;0,5 -1;1 0,1;0,1 | 0,75;0,75 1;1 -1;1 -0,1;0,1 | -3;3 -0,1;0,1 -3;3 -0,4;0,4 | 8 8 8 10 |
[4, ст.142]
З вище наведених параметрів АЦП, ми бачимо, що АЦП К1113ПВ1 має найменшу величину похибок. Крім того, це є єдина з приведених мікросхем функціонально завершена ВІС, яка містить у своєму складі компаратор напруг, ЦАП, РПН, джерело опорної напруги, ГТІ, вихідний буферний регістр з трьома станами а також логічні схеми керування, чого нема у інших мікросхем, тобто її використання дозволяє максимально спростити схему. Це є послідовний з накопиченням АЦП послідовних наближень. Мікросхема призначена для перетворення однополярного або двополярного вхідного сигналу з представленням результатів перетворення у паралельному двійковому коді. Для її експлуатації необхідні тільки два джерела живлення і регулювальні резистори. Виготовляється по біполярній технології, що модифікована для суміщеного формування на кристалі біполярних транзисторів, а також елементів інжекційної логіки і тонкоплівкових прецезійних резисторів. Технологія дозволяє розмістити в одній ВІС велике число цифрових елементів і виконувати аналогові вузли з високим рівнем параметрів. Мікросхема К1113ПВ1 випускається у 18-виводному герметичному металокерамічному корпусі типу 238.18-1 з вертикальним розташуванням виводів.
Нумерація і призначення виводів:
1-9 – цифрові виходи 2-10;
10 – напруга джерела живлення UCC1;
11 – гашення і перетворення;
12 – напруга джерела живлення UCC2;
13 – аналоговий вхід;
14 – аналогова земля;
15 – керування зсувом нуля;
16 – цифрова земля;
17 – готовність даних;
18 – цифровий вихід 1.
Номінальні напруги джерел живлення: UCC1=5В і UCC2=-15В.
Як і будь-який АЦП послідовних наближень, дана мікросхема має наступний принцип роботи: після подачі сигналу “Пуск” на виході найстаршого розряду РПН з’являється логічна одиниця. На виході ЦАП з’являється відповідна напруга. Якщо ця напруга менша Uвх , то включається логічна одиниця на виході наступного розряду регістра, інакше ця напруга знімається. Таким методом спроб перебираються всі розряди до наймолодшого.
У ВІС К1113ПВ1 вихідний струм ЦАП порівнюється з струмом, який протікає через вхідний резистор від джерела сигналу. Тим самим формується логічний сигнал керування РПН. Стабілізація розрядних струмів ЦАП здійснюється вбудованим ДОН на основі стабілітрона із закритою структурою.
Включення АЦП в режимі роботи з уніполярною вхідною напругою передбачає під’єднання виводу 15 до цифрової землі (вивід 16). При цьому на виході вбудованого ЦАП задається струм, який дорівнює струму цифрового виводу 1, але має протилежну полярність [4,ст.150].
При роботі з уніполярною вхідною напругою її величина рівна 0…+10 В.
Встановлення РПН у вихідний стан і запуск його в режим перетворення проводиться по зовнішньому сигналу “Гашення/перетворення”. По закінченню перетворення АЦП видає сигнал “Готовність даних”, і інформація з РПН поступає на цифрові виходи через каскади з трьома станами.
Часові діаграми вхідних і вихідних сигналів зображені на рис. 4.1 [4]:
рис. 4.1 Часові діаграми вхідних і вихідних сигналів АЦП
Для спряження АЦП і ЦАП з МП використаємо програмований паралельний інтерфейс (ППІ) КР580ВВ55. При програмному опитуванні АЦП можна використовувати режим 0 ППІ, а при вводі через переривання при використанні команди RST N – режим 0 або 1.
Режим роботи і напрям обміну з зовнішніми пристроями програмується керуючими словами. Керуюче слово режиму встановлює режими роботи груп А або B і режим вводу або виводу для кожного порта. Керуюче слово порозрядного встановлення або скидання порту С використовується для порозрядного вводу інформації і для початкового встановлення станів окремих розрядів порту С при його використанні для керування обміном в режимах 1, 2.[8].
Рис 4.2 Два способи реалізації команди RST 7
Запуск АЦП (сигнал П) здійснюється через паралельний інтерфейс КР580ВВ55 (розряд 4 каналу С). ППІ використовується в режимі 0, сигнал ГТ після інвертування поступає на вхід синхронізації тригера К155ТМ2. Коли на вході “С” відбувається перехід від рівня логічного нуля до рівня логічної одиниці, дані з входу D (тобто логічна “1”) передаються на вхід Q, який з’єднаний з виводом запиту переривання INT мікропроцесора КР580ВМ80. Очевидно, що ця зміна стану тригера відбувається лише тоді, коли на вході R (виводі INTE) сигнал має рівень логічної “1”, тобто переривання дозволено.
При виконанні машинного циклу “Підтвердження переривання” в керуючому слові, яке на початку машинного циклу записується в системний контролер (СК), розряд INTA є рівним одиниці, що обумовлює формування одноіменного сигналу керування. Цей сигнал через інвертор (якщо він є H – активним і без інвертора при L – активному сигналі) поступає на вхід дозволу буферного елемента (БЕ) з трьома вихідними станами (логічні “0” та “1” і високого вихідного опору). При виходи БЕ повторюють логічні рівні на входах 0 – 7. Як БЕ можуть бути використані дві мікросхеми К155ЛП11, кожна з яких має по шість входів/виходів без інвертора.
Формування логічних рівнів на входах БЕ визначається номером N з команди RST N. Для реалізації коду команди RST 7 на вході 6 повинен бути встановлений рівень логічного “0”, а на всіх інших входах – рівень логічної “1”. Цей код команди МП читає не з пам’яті, а безпосередньо з МП, в результаті якої МП переходить до підпрограми обробки переривань, яка повинна бути розміщена в пам’яті адресою 8*7. Крім того, при виконанні команди RST N на виході INTE встановлюється рівень логічного “0”, який “скидає” за допомогою тригера К155ТМ2 сигнал INT. Встановити сигнал INTE=1 можна лише програмно за допомогою команди EI (дозвіл переривання), якою повинна завершуватись підпрограма обробки переривань.
При такому використанні БЕ реалізується лише один запит на переривання. Для реалізації восьмирозрядної векторної системи потрібно використовувати шифратор (ШФ) з вісьмома входами і трьома виводами (КМ155ИВ1). Для простоти використаємо перший варіант реалізації.
Підключення АЦП до шин МПП в режимі вводу інформації через переривання при використанні команди RST 7 показане на рис. 4.3.
Рис. 4.3 Підключення АЦП до шин МПП в режимі вводу інформації через переривання при використанні команди RST 7.
Похожие работы
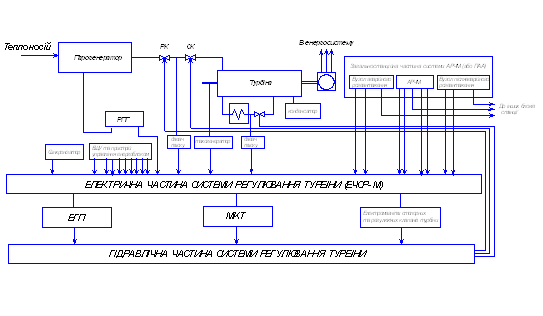
... , звитих в плоскі спіралі. Кінці спіралей приварені до трьох роздаючих і до трьох колекторних труб. 2. Призначення, склад, технічні характеристики системи автоматичного регулювання 2.1 Призначення системи автоматичного регулювання Система автоматичного регулювання (САР) турбіни виконується електрогідравлічною і структурно складається з електричної і гідравлічної частин, робота яких взає ...
... випадків, аварій, а з цим і простоїв на підприємстві, укріпити та створити культуру трудової діяльності. Виконання та розробка дипломного проекту “ Розробка дослідження системи керування електроприводом змінного струму дизель-потягу з використанням нейронних мереж ” відбувається за допомогою комп'ютера, тому питання охорони праці розглядаються щодо забезпечення здорових і безпечних умов роботи ...
... дображення стану систем і т. п. В курсовому проекті я розробляю лічильник, який рахує число людей. 1.Основна частина 1.1 Розробка технічного завдання Загальні відомості: Мікропроцесорній пристрій, який рахує число імпульсів готової продукції. Призначення розробки: розробка МПС з навчальною метою. Вимоги до МПС: Тип МК ATtiny2313, індикація на 2 розряда, число імпульсів – 10, індикац ...
... ів визначається технічними вимогами, що пред'являються до процесу вимірювання температури.Термопара (термоелектричний перетворювач) складається з двох з'єднаних на одному з кінців провідників, виготовлених із металів, що володіють різними термоелектричними властивостями. Рис.13. Термопара(схеми) З'єднані кінці, які звуться робочим спаєм, опускають у вимірюване середовище, а вільні кінці ( ...
0 комментариев