Навигация
Ограничение любой координаты достигается ограничением ее задания, т.е. выходного сигнала регулятора, внешнего по отношению к рассматриваемому контуру
37427
знаков
3
таблицы
0
изображений
4. Ограничение любой координаты достигается ограничением ее задания, т.е. выходного сигнала регулятора, внешнего по отношению к рассматриваемому контуру.
5. На выходе регулирующей части системы управления устанавливается фильтр. Постоянная времени Тμ этого фильтра является основным параметром системы авторегулирования и определяет важнейшие свойства системы.
6. Синтез регуляторов СПР осуществляется методом последовательной коррекции (начиная с внутреннего контура и кончая внешним). Практически при выборе передаточной функции регулятора Wpi(p) i-го контура стремятся решить две основные задачи:
- обеспечить за счет действия регулятора компенсацию наиболее существенных инерционностей объекта, входящих в данных контур, и тем самым улучшить быстродействие системы;
- обеспечить определенный порядок астатизма данного контура за счет введения в регулятор интегрирующего звена.
Передаточная функция регулятора i-го контура будет иметь вид:
Настройка системы производится путем последовательной оптимизации контуров регулирования. Каждый контур оптимизируется по модульному или симметричному оптимумам, в основе которых лежит обеспечение вполне определенных показателей по выполнению, колебательности и точности системы автоматического управления, т.е. получение технически оптимального переходного процесса.
СПР имеют следующие достоинства:
1. Простота расчета регуляторов каждого контура при настройке по тому или иному оптимуму.
2. Высокие статические и динамические показатели, обеспечиваемые настройкой контуров регулирования по модульному или симметричному оптимумам.
3. Простота ограничения регулируемых координат.
4. Унификация оборудования, обусловленная особенностями регуляторов СПР и наличием унифицированных блочных систем регулирования, специально выпускаемых для СПР.
5. Простота настройки.
Основной недостаток - некоторый проигрыш по быстродействию.
На рис. 10 представлена структурная схема двухконтурной системы подчиненного регулирования электропривода постоянного тока.
В соответствие с требованиями к электроприводу принимаем двухконтурную САР скорости с внутренним контуром регулирования тока якоря. Выбираем однократно интегрирующую САР скорости, поскольку астатизм системы по моменту сопротивления не требуется и однократно интегрирующая САР обладает динамическими свойствами по сравнению с двукратно интегрирующей. Контуры тока якоря и скорости настроены на модульный оптимум. Поэтому в системе применяется ПИ-регулятор тока и П-регулятор скорости. Ускорение и замедление привода обеспечивается путем формирования линейно изменяющегося сигнала задания на скорость задатчиком интенсивности. Функциональная схема САР скорости представлена на рис. 11.
7 РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ ТОКА ЯКОРЯ И ЦЕПИ КОМПЕНСАЦИИ ЭДС ЯКОРЯ 7.1 ВЫБОР КОМПЕНСИРУЕМОЙ ПОСТОЯННОЙ
Величина Тμ является "базовой" при расчете СПР, для которых характерно, что динамические свойства системы не зависит от параметров объекта регулирования и определяется только величиной постоянной времени Тμ фильтра, установленного на выходе регулирующей части системы управления. Таким образом , в стандартных системах регулирования величина Тμ является единственным средством воздействия на систему управления.
С одной стороны уменьшение Тμ приводит к увеличению быстродействия и снижению статической и динамической ошибок по скорости при приложении внешних возмущающих воздействий, с другой стороны величина этой постоянной времени должна быть достаточно большой, чтобы обеспечить высокую помехозащищенность системы, ограничение тока якоря на допустимом уровне и устойчивость работы САУ с учетом дискретность тиристорного преобразователя.
Следовательно фильтр с постоянной времени Тμ должен реально присутствовать в САУ электроприводом.
В реальных САУ с подчиненным регулированием параметров величина Тμ лежит в пределах 0,004-0,01 с.
Для нашей системы выберем Тμ = 0,007 с.
7.2 расчет контура регулирования тока якоря 7.2.1 Расчетная структурная схема контура токаКонтур регулирования тока якоря является внутренним контуром САУ электроприводом. Он образуется регулятором тока, фильтром с постоянной времени Тμ, тиристорным преобразователем, якорной цепью и обратной связью по току через датчик тока (kдт = 1). В объекте управления имеет место внутренняя обратная связь по ЭДС якоря двигателя. Структурная схема контура тока представлена на рис. 12.
7.2.2 Передаточная функция регулятора тока
При синтезе регулятора внутренняя обратная связь оп ЭДС не учитывается.
Передаточная функция регулятора тока, найденная по условию настройки на модульный оптимум:
, где
Тi1 = Tэ = 0,07с;
При выборе данной передаточной функции регулятора тока замкнутый контур тока будет описываться передаточной функцией фильтра Баттерворта II порядка:
| |
рис. 13.
7.2.3 Компенсация влияния ЭДС якоря двигателя
Действие ЭДС якоря приводит к погрешности регулирования тока. Появляется астатизм контура по задающему воздействию. При единичном задании на ток статическая ошибка составит:
, где
Статическая ошибка по току оказывается существенной, поэтому пренебречь влиянием обратной связи по ЭДС нельзя. Для компенсации влияния ЭДС якоря используют принцип комбинированного управления. В систему управления вводится положительная обратная связь по ЭДС. Для удобства технической реализации эта обратная связь подается на вход регулятора тока, а фильтр выносится из контура в цепь задания и обратной связи по току. Структурная схема контура тока с компенсирующей связью по ЭДС представлена на рис. 14.
Передаточная функция звена компенсации ЭДС будет иметь вид:
, где
7.2.4 Реализация датчика ЭДС
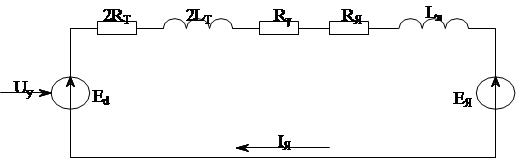
ЭДС якоря двигателя, в отличие от тока якоря и скорости, недоступна для прямого измерения. Датчик косвенного измерения ЭДС якоря использует сигналы датчика тока якоря и датчика напряжения на якоре двигателя. Связь между током якоря, напряжением якоря и ЭДС якоря устанавливает уравнение электрического состояния равновесия в якорной цепи. В операторном виде оно имеет вид:
, где
Выразив ЭДС, получим уравнение датчика. Структурная схема датчика тока приведена ниже. Для возможности практической реализации форсирующего звена и защиты системы от помех в сигналах датчиков в канале тока и напряжения датчика ЭДС добавлено инерционное звено с постоянной времени Тμ. Таким образом реальный датчик ЭДС будет инерционным. 7.3 Конструктивный РАСЧЕТ
Рассмотрим реализацию управляющей части контура тока якоря в аналоговой системе автоматического управления электроприводом на базе операционных усилителей.
Принципиальная схема регулятора тока и цепи компенсации ЭДС представлена на рис. 16.
Регулятор реализован на усилителе DA1, звено компенсации ЭДС - на усилителе DA2. Усилитель DA3 предназначен для суммирования сигналов в датчике ЭДС.
Для расчета элементов схемы по известным значениям параметров в относительных единицах используем базисные величины:
Iбр = 0,5 мА - базисный ток регулирования принимаем, как рекомендуется в [5].
Uбр = 10 В - базисное напряжение регулирования.
Базисное сопротивление системы регулирования:
Принимаем величины сопротивлений
Емкость фильтров в цепи задания и обратной связи по току:
Емкость в цепи обратной связи усилителя DA1:
Сопротивления в цепи обратной связи усилителя DA1:
Емкость во входной цепи усилителя DA2
Сопротивление в обратной связи усилителя DA2:
Емкость фильтра на входе DA3:
Параметры элементов на входе форсирующего звена на входе DA3:
, где
8 РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ 8.1 рАСЧЕТНАЯ СТРУКТУРНАЯ СХЕМА КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
Согласно требованиям, предъявляемым к электроприводу, система регулирования скорости выполняется однократной (см. п. 6). Структурная схема контура скорости представлена на рис. 17. Контур регулирования тока настроен на модульный оптимум с наличием компенсации по ЭДС якоря - рассматриваем как фильтр Баттерворта II порядка.
Контур скорости образуется регулятором скорости, контуром регулирования тока якоря. звеном умножения на поток, звеном механической части привода и обратной связью по скорости через датчик скорости (kдс = 1). На объект действует возмущающее воздействие - момент статического сопротивления. 8.2 расчет регулятора скорости
В однократной САР скорости, по условия настройки на модульный оптимум, регулятор скорости имеет передаточную функцию пропорционального звена:
, где
,
φ = 1, т.к. Ф = ФN = const.
Передаточная функция замкнутого контура скорости при настройке на модульный оптимум представляет собой фильтр Баттерворта III порядка:
Реакция контура скорости на скачок задания на скорость представлена на
рис. 18. такой процесс имеет место при mc = 0 (на холостом ходу). Однократная САР обладает астатизмом по возмущающему воздействию, поэтому появление нагрузки приведет к статической ошибке по скорости. При ω* = 1 и mc = 1 (что соответствует в абсолютных единицах Mc =MN) статическая ошибка будет равна:
конструктивный расчет
Принимаем:
Сопротивление в цепи обратной связи DA4:
9 РАСЧЕТ ЗАДАТЧИКА ИНТЕНСИВНОСТИ 9.1 СТРУКТУРНАЯ СХЕМА ЗАДАТЧИКА ИНТЕНСИВНОСТИ
Задатчик интенсивности устанавливается на входе САР скорости и предназначен для формирования сигнала задания на скорость. ЗИ ограничивает темп нарастания снижения задания на скорость и тем самым обеспечивает, чтобы ускорение и динамический момент электропривода не превышали допустимых значений. Структурная схема ЗИ представлена на рис. 20.
Принцип действия ЗИ
При поступлении на вход ЗИ ступенчатого воздействия нелинейный элемент задатчика выходит на ограничение, и на вход интегрирующего звена поступает неизменная величина ωнэ = Q. На выходе интегратора появляется линейно возрастающий сигнал.
|
9.2 расчет параметров Зи
Темп ЗИ представляет собой величину ускорения электропривода в относительных единицах:
Принимаем постоянную времени интегратора Ти = 0,25 с. При этом величина ограничения нелинейного элемента составит:
В абсолютных единицах ограничение соответствует 10 В.
Установившийся динамический момент при разгоне с темпом А:
Проверим выполнение условия:
Из пункта 3:
Установившаяся динамическая ошибка по скорости при разгоне с темпом А:
9.3 конструктивный РАСЧЕТПринципиальная схема ЗИ представлена на рис. 22.
Нелинейный элемент реализуется на операционном усилителе DA7 за счет включения в обратную связь пары стабилитронов VD6 и МВ7. Интегратор реализуется на операционном усилителе DA6. Усилитель DA5 предназначен для инвертирования сигнала.
Принимаем:
Коэффициент усиления линейной зоны нелинейного элемента принимаем равным 100.
Емкость в обратной связи интегратора:
10 КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ САР СКОРОСТИ
ЛИТЕРАТУРА
1. Типовые задания к курсовому проекту по основам электропривода / Томашевский Н.И., Шрейнер Р.Т. и др. - Свердловск: СИПИ, 1989. - 48 с.
2. Справочные данные по элементам электропривода: Методические указания к курсовому проекту по дисциплине "Теория электропривода" / И.Я. Браславский
А.М. Зюзев и др. - Екатеринбург: УГТУ, 1995. - 56с.
3. Расчет полупроводникового преобразователя системы ТП-Д: Методические указания к курсовой работе по курсу "Электронные микропроцессорные и преобразовательные устройства" /В.И. Лихошерст. Свердловск: УПИ, 1990. - 37 с.
4. Комплектные тиристорные электроприводы: Справочник / И.Х. Евзеров, А.С. Горобец и др.; под ред. В.М. Перельмутера. - М.: Энергоатомиздат, 1988. - 319 с.
5. Шрейнер Р.Т. Однозонные системы автоматического управления скоростью электроприводов: Учебно-методическая разработка к курсовому проектированию по дисциплине "Системы автоматического управления электроприводами". - Свердловск: СИПИ, 1985. - 77 с.
Похожие работы
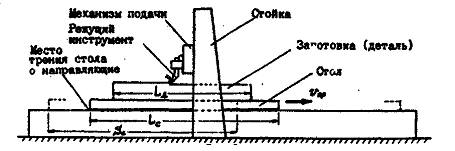
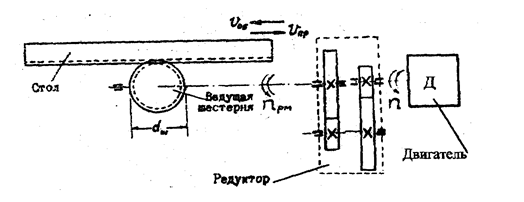
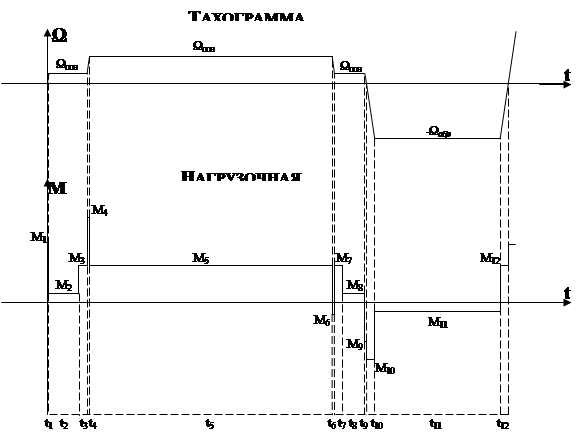
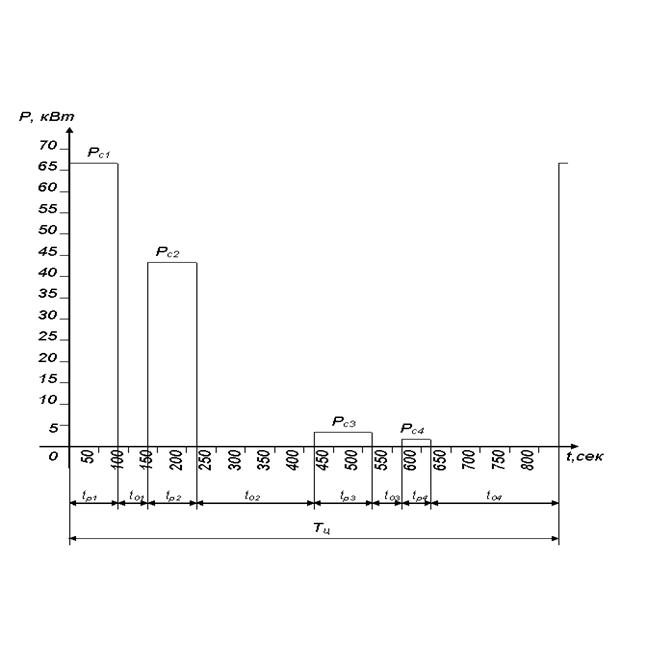
... силовой преобразовательный агрегат, силовой трансформатор и реакторы, выполнить расчет элементов системы автоматического управления электроприводом, выполнить компьютерное моделирование системы автоматизированного электропривода в типовых режимах. Требования к электроприводу: 1. Обеспечение работы механизма по следующему циклу: • подход детали к резцу с пониженной скоростью; • ...
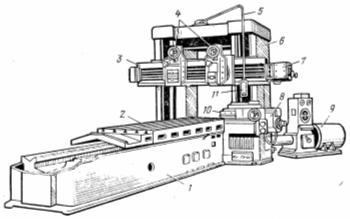

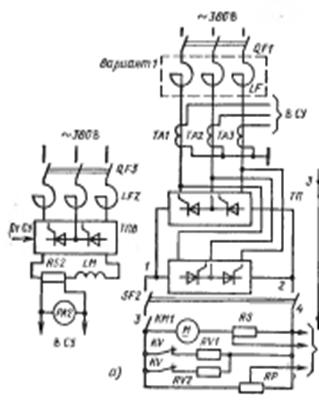
... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
... in 1975 together with Paul Alien, his partner in computer language development. While attending Harvard in 1975, Gates together with Alien developed a version of the BASIC computer programming language for the first personal computer. In the early 1980s. Gates led Microsoft's evolution from the developer of computer programming languages to a large computer software company. This transition ...
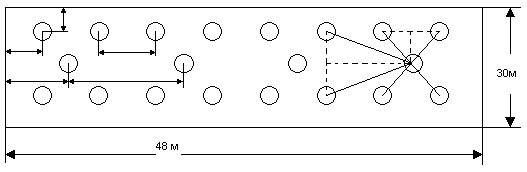
... приемников электроэнергии, режимы их работы и размещении по территории цеха, номинальные токи и напряжения. Электромеханический цех (ЭМЦ) предназначен для подготовки заготовок из металла для электрических машин с последующей их обработкой различными способами. Он является одним из цехов металлургического завода, выплавляющего и обрабатывающего металл. ЭМЦ имеет станочное отделение, в котором ...
0 комментариев