Навигация
SPECint92 при тактовой частоте 300 МГц. Производительность Р6
43133
знака
1
таблица
6
изображений
330 SPECint92 при тактовой частоте 300 МГц. Производительность Р6
ниже (по оценкам «Intel» - 200 SPECint92 при тактовой частоте 133
МГц), однако Р6 обеспечивает лучшее соотношение стоимость/произ-
водительность для своего потенциального рынка.
При оценке соотношения стоимость/производительность следует
учитывать, что, хотя Р6 может оказаться дороже своих конкурентов,
большая часть других процессоров должна быть окружена дополни-
тельным набором чипов памяти и контроллером кэша. Кроме того, для
достижения сравнимой производительности работы с кэшом, другие
процессоры должны будут использовать кэш большего, чем 256 кб
размера.
«Intel», как правило, предлагает многочисленные вариации
своих процессоров. Это делается с целью удовлетворить разнообраз-
ным требованиям проектировщиков систем и оставить меньше прост-
ранства для моделей конкурентов. Поэтому можно предположить, что
вскоре после начала выпуска Р6 появятся как модификации с увели-
ченным объемом вторичной кэш-памяти, так и более дешевые модифи-
кации с внешним расположением вторичного кэша, но при сохраненной
выделенной шине между вторичным кэшом и процессором.
2Pentium как точка отсчетаПроцессор Pentium со своей конвейерной и суперскалярной ар-хитектурой достиг впечатляющего уровня производительности.
Pentium содержит два 5-стадийных конвейера, которые могут
работать параллельно и выполнять две целочисленные команды за ма-
шинный такт. При этом параллельно может выполняться только пара
команд, следующих в программе друг за другом и удовлетворяющих
определенным правилам, например, отсутствие регистровых зависи-
мостей типа «запись после чтения».
В P6 для увеличения пропускной способности осуществлен пере-
ход к одному 12-стадийному конвейеру. Увеличение числа стадий
· 5 -
приводит к уменьшению выполняемой на каждой стадии работы и, как
следствие, к уменьшению времени нахождения команды на каждой ста-
дии на 33 процента по сравнению с Pentium. Это означает, что ис-
пользование при производстве P6 той же технологии, что и при про-
изводстве 100 МГц Pentium, приведет к получению P6 с тактовой
частотой 133 МГц.
Возможности суперскалярной архитектуры Pentium, с ее способ-
ностью к выполнению двух команд за такт, было бы трудно превзойти
без совершенно нового подхода. Примененный в P6 новый подход уст-
раняет жесткую зависимость между традиционными фазами «выборки» и
«выполнения», когда последовательность прохождения команд через
эти две фазы соответствует последовательности команд в программе.
Новый подход связан с использованием так называемого пула команд
и с новыми эффективными методами предвидения будущего поведения
программы. При этом традиционная фаза «выполнение» заменяется на
две: «диспетчирование/выполнение» и «откат». В результате команды
могут начинать выполняться в произвольном порядке, но завершают
свое выполнение всегда в соответствии с их исходным порядком в
программе. Ядро P6 реализовано как три независимых устройства,
взаимодействующих через пул команд (рис. 1).
2Основная проблема на пути повышения
2производительности
Решение об организации P6 как трех независимых и взаимодейс-твующих через пул команд устройств было принято после тщательного анализа факторов, ограничивающих производительность современных микропроцессоров. Фундаментальный факт, справедливый для Pentium и многих других процессоров, состоит в том, что при выполнении реальных программ мощность процессора не используется в полной мере. Рассмотрим в качестве примера следующий фрагмент программы, записанный на некотором условном языке:
r1 <- mem[r0] /* Команда 1 */
r2 <- r1 + r2 /* Команда 2 */
r5 <- r5 + 1 /* Команда 3 */
r6 <- r6 - r3 /* Команда 4 */
Предположим, что при выполнении первой команды фрагмента -
загрузки из памяти в регистр r1 - оказалось, что содержимое соот-
ветствующей ячейки памяти отсутствует в кэше. При традиционном
подходе процессор перейдет к выполнению команды 2 только после
того, как данные из ячейки mem[r0] основной памяти будут прочита-
ны через интерфейс шины. Все время ожидания процессор будет прос-
таивать.
В то время как скорость процессоров за последние 10 лет вы-
росла по меньшей мере в 10 раз, время доступа к основной памяти
уменьшилось только на 60 процентов. Это увеличивающееся отстава-
ние скорости работы с памятью по отношению к скорости процессора
и было той фундаментальной проблемой, которую пришлось решать при
проектировании P6.
Один из возможных подходов к решению этой проблемы - перенос
· 6 -
ее центра тяжести на разработку высокопроизводительных компонен-
тов, окружающих процессор. Однако массовый выпуск систем, включа-
ющих и высокопроизводительный процессор, и высокоскоростные спе-
циализированные микросхемы окружения, был бы слишком дорогостоя-
щим.
Можно было попытаться решить проблему с использованием гру-
бой силы, а именно увеличить размер кэша второго уровня, чтобы
уменьшить процент случаев отсутствия необходимых данных в кэше.
Это решение эффективное, но тоже чрезвычайно дорогостоящее, осо-
бенно учитывая сегодняшние скоростные требования к компонентам
кэша второго уровня. P6 проектировался с точки зрения эффективной
реализации целостной вычислительной системы, и требовалось, чтобы
высокая производительность системы в целом достигалась с исполь-
зованием дешевой подсистемы памяти.
2Решение, принятое в P6Решение сформулированной в предыдущем разделе проблемы памя-ти, принятое в P6, заключается в обращении к пулу команд, извле-чении из него команд, следующих за командой, требующей обращения к памяти, и выполнения до момента завершения команды-тормоза мак-симума полезной работы. В приведенном в предыдущем разделе приме-ре процессор не может выполнить команду 2 до завершения команды 1, так как команда 2 зависит от результатов команды 1. В то же время процессор может выполнить команды 3 и 4, не зависящие от результата выполнения команды 1. Мы будем называть такое выполне-ние команд опережающим выполнением. Результаты опережающего вы-полнения команд 3 и 4 не могут быть сразу записаны в регистры, поскольку мы должны изменять состояние вычислительной системы только в соответствии с правильным порядком выполнения программы. Эти результаты хранятся в пуле команд и извлекаются оттуда позд-нее. Таким образом, процессор выполняет команды в соответствии с их готовностью к выполнению, вне зависимости от их первоначально-го порядка в программе, то есть с точки зрения реального порядка выполнения команд P6 является машиной, управляемой потоком дан-ных. В то же время изменение состояния вычислительной системы, например запись в регистры, производится в строгом соответствии с истинным порядком команд в программе.
Чтение из памяти данных, необходимых для команды 1, может
занимать достаточно много тактов. Тем временем P6 продолжает опе-
режающее выполнение команд, следующих за командой 1, и успевает
обработать, как правило, 20-30 команд. Среди этих 20-30 команд
будет в среднем пять команд перехода, которые устройство выбор-
ки/декодирования должно правильно предсказать для того, чтобы ра-
бота устройства диспетчирования/выполнения не оказалась бесполез-
ной. Небольшое количество регистров в архитектуре процессоров
«Intel» приводит к интенсивному использованию каждого из них и,
как следствие, к возникновению множества мнимых зависимостей меж-
ду командами, использующими один и тот же регистр. Поэтому, чтобы
исключить задержку в выполнении команд из-за мнимых зависимостей,
устройство диспетчирования/выполнения работает с дублями регист-
ров, находящимися в пуле команд (одному регистру может соответс-
· 7 -
твовать несколько дублей). Реальный набор регистров контролирует-
ся устройством отката, и результаты выполнения команд отражаются
на состоянии вычислительной системы только после того, как выпол-
ненная команда удаляется из пула команд в соответствии с истинным
порядком команд в программе.
Таким образом, принятая в P6 технология динамического выпол-
нения может быть описана как оптимальное выполнение программы ,
основанное на предсказании будущих переходов, анализе графа пото-
ков данных с целью выбора наилучшего порядка исполнения команд и
на опережающем выполнении команд в выбранном оптимальном порядке.
2Архитектура P6На рисунке 2 приведена более подробная блок-схема P6, вклю-чающая кэши и интерфейс с основной памятью.
Далее мы будем понимать под «упорядоченным» устройство, ко-
торое работает в соответствии с исходным порядком команд в прог-
рамме, а под «беспорядочным» - устройство, которое не обращает
внимания на исходный порядок команд в программе.
Устройство выборки/декодирования является «упорядоченным»
устройством, которое воспринимает на входе поток команд из прог-
раммы пользователя и декодирует их, превращая в последователь-
ность микрокоманд, соответствующих потоку данных в программе
пользователя.
Устройство диспетчирования/выполнения является «беспорядоч-
ным» устройством, которое воспринимает поток данных и планирует
выполнение микрокоманд с учетом зависимостей по данным и доступ-
ности ресурсов, а также временно сохраняет результаты опережающе-
го выполнения в пуле команд.
Устройство отката - «упорядоченное» устройство, которое зна-
ет, как и когда завершить выполнение команды, то есть перевести
временные результаты опережающего выполнения в постоянное состоя-
ние вычислительной системы.
Интерфейс шины является «частично упорядоченным» устройс-
твом, отвечающим за связь трех вышеупомянутых устройств с внешним
миром. Интерфейс шины взаимодействует непосредственно с кэшем
2-го уровня и поддерживает до 4 параллельных обращений к кэшу.
Интерфейс шины также управляет обменом данными с основной па-
мятью, который происходит с использованием протокола MESI [1].
2Устройство выборки/декодированияСтруктура этого устройства приведена на рисунке 3.
Команды из кэша команд могут быть быстро выбраны для после-
дующей обработки. Указатель на следующую команду - это индекс кэ-
ша команд, содержимое которого определяется буфером переходов,
состоянием процессора и сообщениями о неправильном предсказании
перехода, поступающими из устройства выполнения целых команд. Бу-
фер переходов с 512 входами использует расширение алгоритма Йе
(Yeh), которое обеспечивает более чем 90-процентную точность
предсказания переходов.
Предположим, что ничего исключительного не происходит и что
· 8 -
буфер переходов в своих предсказаниях оказался прав (в P6 предус-
мотрены эффективные действия в случае неправильного предсказания
перехода).
Кэш команд выбирает строку кэша, соответствующую индексу в
указателе на следующую команду, и следующую за ней строку, после
чего передает 16 выровненных байтов декодеру. Две строки считыва-
ются из-за того, что команды в архитектуре Intel выровнены по
границе байта, и поэтому может происходить передача управления на
середину или конец строки кэша. Выполнение этой ступени конвейера
занимает три такта, включая время, необходимое для вращения пред-
выбранных байтов и их подачи на декодеры команд. Начало и конец
команд помечаются.
Три параллельных декодера принимают поток отмеченных байтов
и обрабатывают их, отыскивая и декодируя содержащиеся в потоке
команды. Декодер преобразует команды архитектуры Intel в микроко-
манды-триады (два операнда, один результат). Большинство команд
архитектуры Intel преобразуются в одну микрокоманду, некоторые
требуют четырех микрокоманд, а сложные команды требуют обращения
к микрокоду, представляющему из себя набор заранее составленных
последовательностей микрокоманд. Некоторые команды, так называе-
мые байт-префиксы, модифицируют следующую за ними команду, что
также усложняет работу декодера. Микрокоманды ставятся в очередь,
посылаются в таблицу псевдонимов регистров, где ссылки на логи-
ческие регистры преобразуются в ссылки на физические регистры P6,
после чего каждая из микрокоманд вместе с дополнительной информа-
цией о ее состоянии (статусе) посылается в пул команд. Пул команд
реализован в виде массива контекстно-адресуемой памяти, называе-
мого также буфером переупорядочивания.
В этой точке заканчивается «упорядоченная» часть конвейера.
2Устройство диспетчирования/выполненияУстройство диспетчирования выбирает микрокоманды из пула ко-манд в зависимости от их статуса. Под статусом мы будем понимать информацию о доступности операндов микрокоманды и наличии необхо-димых для ее выполнения вычислительных ресурсов. Если статус мик-рокоманды показывает, что ее операнды уже вычислены и доступны, а необходимое для ее выполнения вычислительное устройство (ресурс) также доступно, то устройство диспетчирования выбирает микроко-манду из пула команд и направляет ее на устройство для выполне-ния. Результаты выполнения микрокоманды возвращаются в пул.
Взаимодействие с вычислительными ресурсами происходит через
пятипортовую распределительную станцию. Структура устройства дис-
петчирования/выполнения показана на рисунке 4.
P6 может запускать на выполнение до 5 микрокоманд за такт,
по одной на каждый порт. Средняя длительно поддерживаемая про-
пускная способность - 3 микрокоманды за такт. Процесс планирова-
ния выполнения микрокоманд является принципиально «беспорядоч-
ным»: момент направления микрокоманд на вычислительные ресурсы
определяется только потоками данных и доступностью ресурсов, без
какой бы то ни было связи с первоначальным порядком команд в
программе.
· 9 -
Алгоритм, отвечающий за планирование выполнения микрокоманд,
является крайне важным для производительности процессора в целом.
Если в каждом такте для каждого ресурса готова к выполнению толь-
ко одна микрокоманда, то проблемы выбора не возникает. Но если
готовых к выполнению на данном ресурсе микрокоманд несколько, то
какую из них выбрать? Можно доверить выбор случаю. Можно приме-
нить алгоритм «первый пришел - первый обслужен». Идеальным был бы
выбор микрокоманды, выполнение которой привело бы к максимальному
сокращению графа потоков данных выполняемой программы. Однако
поскольку нет возможности определить такую микрокоманду в ходе
выполнения программы, используется алгоритм планирования, имити-
рующий модель «первый пришел - первый обслужен», предпочитая
смежное выполнение смежных микрокоманд.
Поскольку система команд Intel содержит множество команд пе-
рехода, многие микрокоманды также являются переходами. Алгоритм,
реализованный в буфере переходов, позволяет в большинстве случаев
правильно предсказать, состоится или не состоится переход, но
иногда он все же будет ошибаться. Рассмотрим для примера случай,
когда буфер переходов предсказывает переход назад в конце цикла:
до тех пор, пока условие выхода из цикла не выполняется, переход
будет предсказываться верно, однако когда это условие станет ис-
тинным, предсказание будет ошибочным.
Для исправления случаев неверного предсказания перехода при-
менен следующий подход. Микрокомандам перехода еще в упорядочен-
ной части конвейера ставятся в соответствие адрес следующей ко-
манды и предполагаемый адрес перехода. После вычисления перехода
реальная ситуация сравнивается с предсказанной. Если они совпада-
ют, то проделанная, исходя из предположения об исходе перехода,
работа оказывается полезной, так как соответствует реальному ходу
программы, а микрокоманда перехода удаляется из пула команд.
Если же допущена ошибка (переход был предсказан, но не прои-
зошел, или было предсказано отсутствие перехода, а в действитель-
ности он состоялся), то устройство выполнения переходов изменяет
статус всех микрокоманд, засланных в пул команд после команды пе-
рехода, чтобы убрать их из пула команд. Правильный адрес перехода
направляется в буфер переходов, который перезапускает весь конве-
йер с нового адреса.
2Устройство откатаСтруктура устройства отката изображена на рисунке 5.
Устройство отката также проверяет статус микрокоманд в пуле
команд: оно ищет микрокоманды, которые уже выполнены и могут быть
удалены из пула. Именно при удалении микрокоманды результаты ее
выполнения, хранящиеся в пуле команд, реально изменяют состояние
вычислительной системы, например, происходит запись в регистры.
Устройство отката должно не только обнаруживать завершившиеся
микрокоманды, но и удалять их из пула команд таким образом, чтобы
изменение состояния вычислительной системы соответствовало перво-
начальному порядку команд в программе. При этом оно должно учиты-
вать и правильно обрабатывать прерывания, исключительные ситуа-
ции, неправильно предсказанные переходы и другие экстремальные
· 10 -
случаи.
Процесс отката занимает два такта. В первом такте устройство
отката считывает пул команд и отыскивает готовые к откату микро-
команды; затем оно определяет, какие из этих микрокоманд могут
быть удалены из пула в соответствии с исходным порядком команд в
программе. Во втором такте результаты отката записываются в пул
команд и в регистровый файл отката. Устройство отката может обра-
ботать три микрокоманды за такт.
2Интерфейс шиныСтруктура интерфейса шины изображена на рисунке 6.
Есть два типа обращений к памяти: чтение из памяти в регистр
и запись из регистра в память.
При чтении из памяти должны быть заданы адрес памяти, размер
блока считываемых данных и регистр-назначение. Команда чтения ко-
дируется одной микрокомандой.
При записи надо задать адрес памяти, размер блока записывае-
мых данных и сами данные. Поэтому команда записи кодируется двумя
микрокомандами: первая генерирует адрес, вторая готовит данные.
Эти микрокоманды планируются независимо и могут выполняться па-
раллельно; они могут переупорядочиваться в буфере записи.
Запись в память никогда не выполняется опережающим образом,
так как нет эффективного способа организации отката в случае не-
верного предсказания. Разные команды записи никогда не переупоря-
дочиваются друг относительно друга. Буфер записи инициирует за-
пись, только когда сформированы и адрес, и данные, и нет ожидаю-
щих выполнения более ранних команд записи.
При изучении вопроса о возможности и целесообразности переу-
порядочения доступа к памяти инженеры «Intel» пришли к следующим
выводам.
Команда записи не должна обгонять идущую впереди команду за-
писи, так как это может лишь незначительно увеличить производи-
тельность.
Можно запретить командам записи обгонять команды чтения из
памяти, так как это приведет лишь к незначительной потере произ-
водительности.
Запрет командам чтения обгонять другие команды чтения или
команды записи может повлечь существенные потери в производитель-
ности.
Поэтому была реализована архитектура подсистемы памяти, поз-
воляющая командам чтения опережать команды записи и другие коман-
ды чтения. Буфер упорядочения памяти служит в качестве распреде-
лительной станции и буфера переупорядочивания. В нем хранятся от-
ложенные команды чтения и записи, и он осуществляет их повторное
диспетчирование, когда блокирующее условие (зависимость по данным
или недоступность ресурсов) исчезает.
· 11 -
2ВыводТаким образом, реализованная в P6 комбинация таких архитек-турных методов, как улучшенное предсказание переходов (почти всегда правильно определяется предстоящая последовательность ко-манд), анализ потоков данных (определяется оптимальный порядок выполнения команд) и опережающее выполнение (предвиденная после-довательность команд выполняется без простоев в оптимальном по-рядке), позволила удвоить производительность по отношению к Pen-tium при использовании той же самой технологии производства. Эта комбинация методов называется динамическим выполнением.
В настоящее время «Intel» ведет разработку новой 0,35 мкм
технологии производства, что даст возможность выпускать процессо-
ры P6 с тактовой частотой ядра свыше 200 МГц.
.
· 12 -
2Р6 как платформа для построения мощных серверовСреди наиболее значимых тенденций развития компьютеров в последние годы можно выделить как все возрастающее использование систем на основе процессоров семейства х86 в качестве серверов приложений, так и растущую роль «Intel» как поставщика непроцес-сорных технологий, таких как шины, сетевые технологии, сжатие ви-деоизображений, флэш-память и средства системного администрирова-ния.
Выпуск процессора Р6 продолжает проводимую «Intel» политику
переноса возможностей, которыми ранее обладали лишь более дорогие
компьютеры, на массовый рынок. Для внутренних регистров Р6 пре-
дусмотрен контроль по четности, а соединяющая ядро процессора и
кэш второго уровня 64-битовая шина оснащена средствами обнаруже-
ния и исправления ошибок. Встроенные в Р6 новые возможности диаг-
ностики позволяют производителям проектировать более надежные
системы. В Р6 предусмотрена возможность получения через контакты
процессора или с помощью программного обеспечения информации о
более чем 100 переменных процессора или происходящих в нем собы-
тиях, таких как отсутствие данных в кэше, содержимое регистров,
появление самомодифицирующего кода и так далее. Операционная сис-
тема и другие программы могут считывать эту информацию для опре-
деления состояния процессора. В Р6 также реализована улучшенная
поддержка контрольных точек, то есть обеспечивается возможность
отката компьютера в зафиксированное ранее состояние в случае воз-
никновения ошибки.
Р6 поддерживает те же возможности по контролю при помощи
функциональной избыточности (FRC), что и Pentium. Это означает,
что в P6 предусмотрена возможность построения систем с параллель-
ным выполнением одних и тех же операций двумя процессорами с вза-
имным контролем результатов и сообщением об ошибке в случае рас-
хождения. При этом, к сожалению, P6 по-прежнему не сообщает о
причине ошибки.
В модели Р54С процессора Pentium «Intel» предложила простой
и недорогой способ организации двухпроцессорной работы: ведущий и
ведомый процессоры используют общий кэш и невидимо для приложений
разделяют программу на потоки. Однако использовать такую органи-
зацию работы могут лишь многопоточные операционные системы.
Р6 переводит организацию многопроцессорной работы на новый
уровень, соответствующий определенной «Intel» мультипроцессорной
спецификации MPS 1.1. Одним из наиболее сложных аспектов симмет-
ричной многопроцессорной работы является поддержание кэш-соот-
ветствия для всех подсоединенных к отдельным процессорам кэшей.
Р6 поддерживает кэш-соответствие для вторичного кэша на внутрен-
нем уровне, а внешняя шина P6 выступает как симметричная мультип-
роцессорная шина.
Раньше проектировщики мультипроцессорных систем должны были
создавать собственные шины для связи процессоров, либо приобре-
тать лицензию на уже существующие решения, например Corollary
C-bus II. Теперь средства, реализованные «Intel» в Р6, позволяют
объединить четыре процессора в мультипроцессорную систему. Четыре
- это предел, обуславливаемый принятой в Р6 логикой арбитража.
· 13 -
Еще одна проблема для производителей многопроцессорных сис-
тем на базе Р6 состоит в том, что для эффективной работы таких
систем к каждому процессору подключается выделенный кэш, размер
которого должен быть больше, чем 256 кб - размер кэша в корпусе
Р6. Таким образом, проектировщики высокопроизводительных серверов
будут вынуждены использовать внешние контроллеры кэша и дополни-
тельные микросхемы статической памяти.
Эта проблема будет разрешена, если «Intel» увеличит размер
кэша второго уровня в корпусе Р6, что достижимо либо за счет уве-
личения размера кристалла, либо за счет перехода к более миниа-
тюрной технологии производства. Сегодня производители, которые
хотят строить системы с более чем четырьмя процессорами, должны
объединять две или более четырехпроцессорных системы с помощью
высокоскоростного последовательного соединения память-память. Ре-
ализации таких соединений для PCI ожидаются в этом году.
2Системы на основе Р6Можно предположить, что компьютеры на базе P6 первоначально будут напоминать сегодняшние наиболее мощные Pentium-компьютеры: по меньшей мере 1 Гб жесткий диск, 32 Мб оперативной памяти, мощ-ные графические контроллеры. Появятся первые многопроцессорные серверы на Р6.
Улучшенная диагностика и средства обработки ошибок в Р6 поз-
воляют проектировать на базе Р6 надежные серверы уровня предприя-
тия. Улучшенная поддержка симметричной многопроцессорной работы в
сочетании с поддерживающими такую работу версиями OS/2 и NetWare
приведет к построению на Р6 еще более мощных серверов.
«Intel» предполагает, что первыми Р6-системами будут серве-
ры, однако настольные компьютеры на P6 появятся почти одновремен-
но с ними. Цена первых настольных Р6-компьютеров будет начинаться
с 4000 долларов и расти с ростом мощности конфигурации. С учетом
размера корпуса Р6, его потребления энергии и рассеиваемого тепла
(требуется активное охлаждение), не следует ожидать быстрого по-
явления портативных компьютеров на Р6.
Как обычно, первыми пользователями настольных компьютеров на
процессоре нового поколения будут разработчики программного обес-
печения и пользователи из таких областей, как САПР, настольные
издательские системы, научное моделирование и визуализация его
результатов, статистика, одним словом, те области, которым всегда
недоставало и будет недоставать существующих скоростей.
Что касается серверов, то первыми кандидатами на переход к
Р6 являются серверы приложений, осуществляющие такие работы, как
рассылку сообщений, доступ к базам данных и хранилищам докумен-
тов. Системные серверы и серверы печати не привязаны к конкретно-
му типу процессоров и поэтому не испытывают таких потребностей в
увеличении мощности.
Вполне вероятно, что первыми покупателями Р6- систем будут
сравнительно небольшие организации, где на эти системы будет воз-
ложено выполнение самостоятельно разработанных критичных для дея-
тельности организации приложений. Большие предприятия будут при-
обретать такие системы несколько позднее, после тщательной оценки
· 14 -
и подготовки. Дело в том, что большие организации эксплуатируют
значительно большее число разработанных на заказ программ и стан-
дартного программного обеспечения, и требуется провести проверку
на его совместимость с новыми системами.
Типичная Р6-система будет включать процессор Р6 с тактовой
частотой 133 МГц, внешнюю шину, работающую на половине, одной
третьей или одной четверти от этой частоты, набор чипов Intel
Р6/PCI по имени Orion, поддерживающий версию 2.1 32-битовой шины
PCI с частотой 33 МГц, но не поддерживающий 64-битовые расширения
PCI.
Вследствие наличия встроенного кэша второго уровня, в боль-
шинстве Р6-систем будет отсутствовать внешний кэш и контроллер
кэша. Для построения основной памяти будут использоваться обычные
60-наносекундные DRAM или, в некоторых случаях, поддерживаемые в
наборе чипов Intel Triton для Pentium более скоростные EDO DRAM.
Стандартной будет конфигурация с 16 Мб оперативной памяти при все
возрастающем числе систем с 32 Мб.
Первоначально Р6-системы будут включать как шину PCI, так и
шины EISA/ISA. Однако по мере роста поддержки PCI необходимость в
EISA и ISA будет уменьшаться. Особенно важным для этого является
появление предусмотренных в PCI 2.1 мостов PCI-PCI. Главной проб-
лемой при использовании PCI сегодня является ограничения на сте-
пень ее нагрузки. Мосты между шинами позволяют работать с большим
числом устройств в пределах одного логического адресного прост-
ранства.
Включение в систему нескольких шин PCI, соединенных мостами,
позволит как избежать использования других шин, так и подключать
помимо памяти и графики высокоскоростные сетевые интерфейсы (нап-
ример, 100 Мбит/сек Ethernet, FDDI и ATM) и высокоскоростной пос-
ледовательный ввод-вывод.
Емкость памяти на жестком диске будет по меньшей мере 730 Мб
с использованием интерфейса IDE или SCSI. Большая часть систем
будет включать 2-скоростные или более быстрые CDROM. Графика бу-
дет обеспечивать разрешение 1024 на 768 пикселов и управляться
картами-акселераторами с 2-4 Мб памяти.
Более необычные конфигурации могут включать слоты PCMCIA,
4-скоростные CD-ROM, поддержку 40 Мб/сек Ultra SCSI, встроенные
10-100 Мбит/сек сетевые порты и встроенные возможности мультиме-
диа, реализованные с помощью цифровых сигнальных процессоров или
специальных чипов для обработки звука, ввода/вывода видеоизобра-
жений, компрессии/декомпрессии. Некоторые производители, возмож-
но, прибегнут к использованию новых типов памяти, 128-битовых
графических акселераторов, 64-битовых расширений шины и других
новшеств, допускаемых спецификацией PCI.
2Следующее поколение процессоровТехнология Р6 является логическим развитием технологии Pen-tium. Ожидается что в процессоре Р7 будет реализована существенно отличная от Р6 технология, обеспечивающая прорыв в производитель-ности при сохранении совместимости с семейством x86.
В прошлом году «Intel» и «Hewlett-Packard» договорились о
· 15 -
совместной разработке нового микропроцессора, появление которого
планируется на 1997 или 1998 год. О внутреннем устройстве нового
микропроцессора пока известно лишь то, что он будет использовать
RISC-технологию и обеспечивать выполнение всего существующего для
процессоров Intel х86 и Hewlett-Packard PA-RISC программного
обеспечения. Кроме поддержки существующих наборов команд этих се-
мейств, по всей видимости, в Р7 будет введена собственная система
команд.
Согласно преобладающей точке зрения, «Intel» и «Hewlett-Pac-
kard» ведут эксперименты с технологией VLIW («very long instruc-
tion word» - очень длинное командное слово). Можно сказать, что
VLIW в определенном смысле прямо противоположна технологии, ис-
пользуемой в Р6. В Р6 изощренно построенный декодер транслирует
сложные команды х86 в более короткие и простые RISC-микрокоманды.
VLIW-процессор основывается на компиляторе нового типа, который,
наоборот, упаковывает несколько простых операций в одну «очень
длинную» команду. Каждая «очень длинная» команда содержит незави-
симые друг от друга операции, которые выполняются параллельно.
Иными словами, во VLIW-процессоре ответственность за плани-
рование выполнения команд переносится с аппаратуры на программное
обеспечение. Планирование осуществляет компилятор, и получающийся
в результате компиляции код прикладной программы содержит всю ин-
формацию о порядке выполнения команд.
Однако пока VLIW-технология весьма несовершенна. Во-первых,
не разработаны эффективные методы проектирования VLIW-компилято-
ров. Во-вторых, вполне вероятно, что программное обеспечение,
разработанное для VLIW-процессора, придется перекомпилировать при
появлении процессора нового поколения.
По этим причинам, а также учитывая и другие обстоятельства,
многие обозреватели сомневаются в том, что Intel и Hewlett-Pac-
kard смогут выпустить жизнеспособный с точки зрения конкуренции
на рынке VLIW-процессор. Рынок процессоров х86 слишком важен для
Intel, и вряд ли Intel может полностью положиться на неопробован-
ную технологию. Поэтому вполне вероятно, что Intel работает над
параллельным проектом Р7, основанным на более традиционной техно-
логии, чтобы застраховаться на случай неудачи VLIW-проекта.
Дело в том что возможности усовершенствования архитектуры
х86 не исчерпаны. Естественное направление ее развития включает
усиление суперскалярности до шести одновременно выполняемых ко-
манд, увеличение размера первичных кэшей, размещение вторичного
кэша на кристалле процессора, большее число исполнительных уст-
ройств, увеличение размера буферов и поддержка более длинных це-
почек выполняемых с опережением команд.
Конкуренты «Intel» также не собираются сидеть сложа руки.
«NexGen» планирует выпуск процессора Nx686 в конце 1995 года и
утверждает, что его производительность будет в 2-4 раза превосхо-
дить производительность Nx586. «Cyrix» также работает над процес-
сором-преемником М1, но подробностей пока не сообщает.
Наиболее подробно сообщает о своих планах AMD. Следующий за
К5 процессор К6 появится в 1996 году, а его массовое производство
начнется в 1997 году. К6 будет изготавливаться по технологии 0,35
мкм и будет содержать около 6,5 миллионов транзисторов. Предпола-
· 16 -
гаемая производитель К6 - 300 SPECint92. В 1997 году AMD планиру-
ет выпуск процессора К7, с началом его массового производства в
Похожие работы

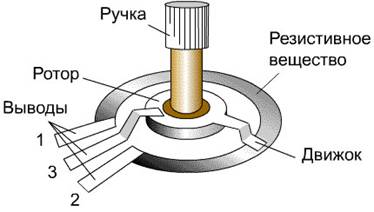
... данные, используют спецификации материалов, покупных комплектующих изделии и полуфабрикатов, что используются при изготовления одного изделия (таблица 3.6). Таблица 3.6 – Ведомость комплектующих элементов на усовершенствование материнской платы № Наименование Стоимость единицы, грн. Количество, шт. Сумма, грн. 1 Резистор МЛТ 0,125 10 кОм / 5% 0,4 2 0,8 2 Переменный резистор ...
... с другом определённым образом общей системой управления. Существует несколько типов регистров, отличающихся видом выполняемых операций. Особенности и различия процессоров Intel и AMD 64-разрядные процессоры AMD и Intel Технология Intel придерживается стандарта EPIC (Explicitly Parallel Instruction Computing). Данная технология создавалась специально для крупных серверов и ...



... информация должна поступать в декодер при восстановлении звукового сигнала. Декодер преобразует серию сжатых мгновенных спектров сигнала в обычную цифровую волновую форму. Audio MPEG - группа методов сжатия звука, стандартизованная MPEG (Moving Pictures Experts Group - экспертной группой по обработке движущихся изображений). Методы Audio MPEG существуют в виде нескольких типов - MPEG-1, MPEG-2 и ...
... 64 KB, 16-Way, 64 Byte/Line, Exclusive Unified (Model 4/6/8) On-Die 256 KB, 16-Way, 64 Byte/Line, Exclusive Unified (Model 10) On-Die 512 KB, 16-Way, 64 Byte/Line, Exclusive AMD вы пускала процессоры двух видов Duron и Atlon.(В настоящее время производство Duron’ов прекращено.) В свою очередь эти 2 серии подразделяются по типу ядра, так называемое кодовое имя (Codename) Argon K7 (0.25 ...
0 комментариев