Навигация
Восьмиразрядных регистра общего назначения;
72188
знаков
6
таблиц
20
изображений
32 восьмиразрядных регистра общего назначения;
128 определяемых пользователем программно-управляемых флагов;
набор регистров специальных функций.
Регистры общего назначения и определяемые пользователем программно-управляемые флаги расположены в адресном пространстве внутреннего ОЗУ данных.
ОМЭВМ при функционировании обеспечивает:
минимальное время выполнения команд сложения регистр-регистр – 1мкс, регистр-память – 2 мкс;
аппаратное умножение и деление с минимальным временем выполнения команд умножения/деления – 4 мкс.
Расширенная система команд обеспечивает побайтовую и побитовую адресацию, двоичную и двоично-десятичную арифметику, индикацию переполнения и определения четности/нечетности, возможность реализации логического процессора. Отличительной чертой ОМЭВМ является то, что ее арифметико-логическое устройство (АЛУ) может наряду с выполнением операций над 8-разрядными типами данных манипулировать одноразрядными данными. Остальные программно-доступные биты могут быть установлены, сброшены или заменены их дополнением, могут пересылаться, проверяться и использоваться в логических вычислениях. Таким образом, благодаря наличию мощного АЛУ и битового процессора набор инструкций ОМЭВМ замечательно подходит для данного устройства сопряжения.
Микросхемы КР1830ВЕ51 конструктивно выполнены в 40-выводных пластмассовых корпусах с двухрядным расположением штырьевых контактов.
Среди прочего, ОМЭВМ содержит следующие узлы:
Логика ввода – вывода, предназначенная для приема и выдачи сигналов, обеспечивающих обмен информацией ОМЭВМ с внешними устройствами через порты ввода/вывода Р0 – Р3.
Блок Т/С состоит из двух таймеров/счетчиков, предназначенных для подсчеты внешних событий, получения программно управляемых временных задержек и выполнения времязадающих функций ОМЭВМ.
Блок последовательного интерфейса и прерываний предназначен для организации ввода-вывода последовательных потоков информации и организации системы прерывания программ.
Порты Р0 – Р3 являются двунаправленными портами ввода/вывода и предназначены для обеспечения информацией ОМЭВМ с внешними устройствами, образуя 32 линии ввода/вывода. Каждый из портов содержит фиксатор-защелку, который представляет собой восьмиразрядный регистр, имеющий байтовую и битовую адресацию для установки (сброса) разрядов с помощью программного обеспечения.
Фиксаторы портов Р0, Р1, Р2, Р3 имеют свои внутренние физические адреса, как при байтовой адресации, так и при битовой адресации.
Помимо работы в качестве обычных портов ввода/вывода линии портов Р0 – Р3 могут выполнять рад дополнительных функций, описанных ниже.
Через порт Р0:
Выводится младший байт адреса А0 – А7 при работе с внешней памятью программ и внешней памятью данных;
Выдается из ОМЭВМ и принимается в ОМЭВМ байт данных при работе с внешней памятью (при этом обмен байтом данных и вывод младшего байта адреса внешней памяти мультиплексированы во времени);
Через порт Р2:
Выводится старший байт адреса А8 – А15 при работе с внешней памятью программ и внешней памятью данных (для внешней памяти данных – только при использовании команд, которые вырабатывают 16-разрядный адрес)
Каждая линия порта Р3 имеет индивидуальную альтернативную функцию:
P3.00 – RxD, вход последовательного порта, предназначен для ввода последовательных данный в приемник последовательного порта;
P3.1 – TxD, выход последовательного порта, предназначен для вывода последовательных данных из передатчика последовательного порта;
P3.2 – INT0 – используется как вход 0 внешнего запроса прерывания;
P3.3 – INT1 - используется как вход 1 внешнего запроса прерывания;
P3.4 – T0, используется, как вход счетчика внешних событий Т/С 0;
P3.5 – T1, используется, как вход счетчика внешних событий Т/С 1;
P3.6 – WR, строб записи во внешнюю память данных, входной сигнал, сопровождающий вывод данных через порт Р0 при использовании соответствующих команд;
P3.7 – RD, строб чтения из внешней памяти данных, выходной сигнал, сопровождающий ввод данных через порт Р0 при использовании соответствующих команд.
Альтернативная функция любой из линий порта Р3 реализуется только в том случае, если в соответствующем этой линии фиксаторе-защелки содержится «1». В противном случае на линии порта 3 будет присутствовать «0».
Среди прочих особенностей данной ОМЭВМ особого внимания заслуживают следующие.
Параллельные порты ввода/вывода.
Для связи ОМЭВМ с объектами управления, для ввода/вывода информации используются 32 двунаправленные линии. Эти линии сгруппированы в 4 порта по 8 линий в каждом. Каждая линия может быть индивидуальна и независимо запрограммирована на вход или выход. При использовании линии в качестве входа необходимо соответствующий бит порта установить в «1». При установке ОМЭВМ в исходное состояние все линии портов включены в исходное состояние. Обращение к портам ввода/вывода осуществляется через регистры специальных функций Р0 – Р3. Обращение производится с использованием команд, оперирующих с байтами, битом или с комбинацией бит.
В случае использования внешней памяти программ или данных, порт 0 служит для ввода младшего байта адреса внешней памяти, а через Р2 – для вывода старшего байта вывода внешней памяти, поэтому, когда мы используем внешнюю память – эти порты заняты. Данные во внешнюю память передаются через регистр Р0 (рис. 9).
 |
Все выводы порта 3 могут быть использованы для реализации альтернативных функций. Альтернативные функции могут быть задействованы путем записи «1» в соответствующие разряды порта «Р3».
В состав ОМЭВМ входят 2 независимых таймера/счетчика Т0 и Т1, предназначенных для измерения временных интервалов, длительности импульсов регенерирования периодически повторяющихся прерываний. Каждому таймеру/счетчику соответствует 16-разрядный таймерный регистр, состоящий из двух байт (TH0, TL0; TH1, TL1)
Таймеры/счетчики работают в двух режимах (в качестве таймера и счетчика).
При работе в качестве таймера, содержимое таймерного регистра увеличивается на единицу в каждом машинном цикле.
Путем программной установки таймерного регистра в исходное состояние и анализа флага переполнения могут быть реализованы различные временные задержки в диапазоне 0000-FFFF. Временная задержка, превышающая это значение (65535 мкс) может быть получена накоплением переполнений в рабочем регистре под управлением программы.
При работе в режиме счетчика событий таймерный регистр увеличивается на 1 каждый раз, когда сигнал на входе Т0 порта 3 переходит из «1» в «0».
Состояние внешнего входа Т0 или Т1 опрашивается каждую микросекунду (машинный цикл). Для управления таймером/счетчиком используются 2 регистра специальных функций: TCON – регистр управления и TMOD – регистр режимов.
Прерывания
МК51 имеет 5 аппаратных источников прерываний. Прерывание – сигнал, который поступает в ОМЭВМ от одного из 5 источников прерываний и вызывает переход из основной программы в подпрограмму обработки прерываний.
Появление сигнала – событие, неожиданное для основной программы. Поэтому точно не известно, в каком месте выполнения программы это произойдет. В ОМЭВМ используется векторная система прерываний. Это значит, что для каждого источника прерываний в ПЗУ предусмотрен адрес (вектор) начала подпрограммы обработки прерываний.
Каждый источник прерываний имеет свой адрес начала подпрограммы обработки прерываний. Адреса находятся в ПЗУ.
Получив запрос прерывания от одного из пяти источников, система обработки прерываний выполняет следующие действия:
Помещает в стек содержимое счетчика команд, чтобы запомнить команду основной программы, на которую нужно вернуться после обработки прерываний.
Загружает в счетчик команд адрес вектора, соответствующей подпрограммы обработки прерываний и осуществляет переход по этому адресу. По адресу вектора должна быть расположена команда безусловного перехода к начальному адресу подпрограммы обработки прерываний.
Подпрограмма обслуживания прерывания обязательно завершается командой выхода из подпрограммы, обслуживающей прерывания, по которой счетчик команд перезагружается из стека адресом возврата в основную программу и осуществляет аппаратный сброс запросов прерываний.
Последовательный порт ввода/вывода
В состав ОМЭВМ входит последовательный порт, представляющий собой асинхронный приемопередатчик. Он осуществляет прием и передачу информации, представленной последовательным кодом, младшими битами вперед. Для этого в состав УАПП входят принимающие и передающие сдвиговые регистры, преобразующие параллельный код в последовательный. Последовательный порт является дуплексным, то есть одновременно осуществляет прием и передачу. Передаваемые и принимаемые данные хранятся в регистре специальных функций SBUF – буферный регистр. Физически регистр SBUF представляет собой 2 раздельных регистра. Один – для передаваемых данных, второй – для принимаемых. При приеме обеспечивается хранение принятого байта до конца приема следующего байта. Байт, не прочитанный из SBUF за время приема следующего байта, теряется. Запись байта в буфер SBUF при передаче приводит к автоматической перезаписи байта в сдвигающий регистр передатчика и инициализирует передачу байта. Всего имеется 4 режима работы последовательного порта:
00 – синхронный режим приема/передачи 8-битных данных. Частота передачи – 1/12 частоты процессора. Скорость фиксированная.
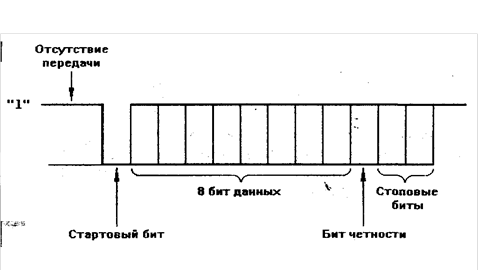
01 – 8-битный режим передачи с переменной скоростью. Скорость передачи задается таймером Т1 (600 – 9600 бит/сек). Формат посылки: 1 старт + 8 бит информации + 1 стоп.
10 – 9-битный режим передачи информации с фиксированной скоростью. Скорость передачи – частота резонатора деленная на 64 или на 32. 9-й бит может использоваться для контроля по четности.
11 – 9-битный режим передачи информации с переменной скоростью, величина которой задается таймером Т1.
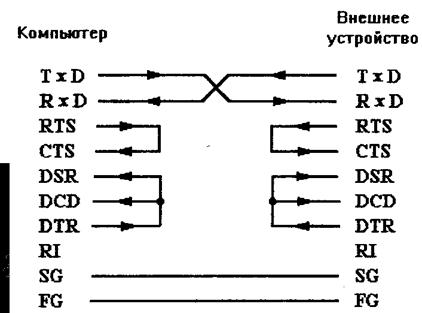
Для сопряжения с интерфейсом RS232C, УАПП может работать в режимах 10 и 11, когда скорость определяется таймером Т1. Если устройство разрабатывается на МК51, оно должно иметь выход на последовательный интерфейс с RS232C. При этом перед разработчиком встают следующие проблемы:
Согласование уровней сигналов RS232C и МК51.
Поддержание стандартной скорости передачи.
Поддержание стандартных форматов посылок.
Поддержание стандартных протоколов обмена – набор символов для того, чтобы обеспечить нормальный прием/передачу.
Задача преобразования последовательного кода выходного сигнала частотомера в параллельный несколько усложняется тем, что необходим опрос 38 каналов. Данное обстоятельство приводит к необходимости применения дополнительных микросхем, позволяющих решить эту задачу. Для этого использовались микросхемы КР580ВВ55А.
Микросхема КР580ВВ55А предназначена для параллельной передачи информации между микропроцессором и периферийными устройствами и содержит три 8-разрядных канала ввода/вывода
А, В, С.
Канал С может быть представлен в виде двух 4-разрядных каналов ввода/вывода, доступ к которым производится как к отдельным независимым каналам. Периферийные устройства подключаются к каналам А, В, С, а связь с микропроцессором осуществляется с помощью шины D через буфер данных. Структурная схема КР580ВВ55А представлена на рис 10.

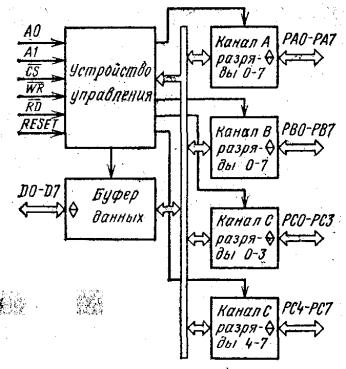
Рисунок 10 Структурная схема микросхемы КР580ВВ55А
Каждый из каналов А, В, С состоит из 8-разрядного регистра и двунаправленных формирователей, имеющих на выходе состояние «Выключено», Устройство управления содержит регистр управляющего слова (РУС), в который предварительно производится запись информации, определяющей режим работы каналов, и формирует сигналы выбора канала и управления каналом С.
Микросхема может работать в одном из трех режимов: режим 0 - простой ввод/вывод; режим 1 - стробируемый ввод/вывод; режим 2 -двунаправленный канал. Режим работы каналов можно. изменять как в начале, так и в процессе выполнения программы, что позволяет обслуживать различные периферийные устройства в определенном порядке с помощью одной микросхемы КР580ВВ55А. Каналы А и В могут работать в различных режимах, а работа канала С зависит от режимов работы каналов А и В, Комбинируя режимы работы каналов, можно обеспечить работу микросхемы почти с любым периферийным устройством.
В режиме 0 осуществляется простой ввод/вывод данных по трем 8-разрядным каналам, причем канал С может использоваться как два 4-разрядных канала. Каждый из каналов может использоваться отдельно для ввода или вывода информации, В режиме 0 входная информация не запоминается, а выходная хранится в выходных регистрах до записи новой информации в канал или до записи нового режима.
В режиме 1 передача данных осуществляется только через каналы А и В, а линии канала С служат для приема и выдачи сигналов управления. Каждый из каналов А и В независимо друг от друга может использоваться для ввода или вывода 8-разрядных данных, причем входные и выходные данные фиксируются в регистрах каналов,
В режиме 2 для канала А обеспечивается возможность обмена информацией с периферийными устройствами по 8-разрядному двунаправленному каналу. Для организации обмена используются пять линий канала С, В режиме 2 входные и выходные данные фиксируются во входном и выходном регистрах соответственно. Назначение выводов КР580ВВ55А приведено в табл. 3
| Номер вывода | Обозначение | Назначение |
| 9, 8 | А0, А1 | Адрес |
| 27 – 34 | D7 – D0 | Шина данных |
| 37 - 40, 1 - 4 | РА7 – РА0 | Канал А |
| 5 | RD | Чтение |
| 6 | CS | Выбор микросхемы |
| 7 | GND | Общий |
| 10 - 13, 17, 16, 15, 14 | PC7—PCO | Канал С |
| 18 - 25 | PB0 - PB7 | Канал В |
| 26 | Ucc | +5В |
| 35 | RESET | Установка |
| 36 | WR | Запись |
Таблица 3 Назначение выводов микросхемы КР580ВВ55А
Данные микросхемы подключались к микроЭВМ и позволяли увеличить количество портов ввода/вывода до необходимого количества.
Конечная схема подключения представлена на рис 9.
|
| |
Разработка программного обеспечения устройства сопряжения
В задачи программного обеспечения, для устройства сопряжения входит:
Получение от частотомера сигнала очередного замера информации с датчика;
По пришествии этого сигнала последовательно считать информацию о каждой цифре выходного сигнала;
Отметить время прихода сигнала (точнее, время, прошедшее со времени предыдущего прихода сигнала);
Инициализировать порт последовательной передачи информации;
Преобразовать данные в последовательный код;
Переслать последовательный код на ЭВМ;
Получить и обработать данные на ЭВМ, представив их в удобном для прочтения виде.
Первые шесть задач решаются непосредственно ОМЭВМ на уровне языка Ассемблер, седьмая задача решается при помощи языка высокого уровня на ЭВМ.
Перед тем, как использовать устройство сопряжения по назначению, необходимо провести инициализацию необходимых аппаратных ресурсов:
Источника прерываний INT0;
Установка необходимого времени отсчета Т0;
Установка необходимой величины пересчета Т1;
Программирование альтернативных функций порта ввода/вывода Р3 ОМЭВМ;
Установка необходимых режимов работы таймеров Т0 и Т1 и последовательного порта ввода/вывода.
Блок-схема программы устройства сопряжения представлена на рис 12.
|
|
 Рисунок 12 Блок-схема программы устройства сопряжения
Рисунок 12 Блок-схема программы устройства сопряжения Текст программы на языке Ассемблер представлен ниже
0000 0200F7 LJMP 00F7
0003 020200 LJMP 0200
0006 00 NOP
0022 00 NOP
0023 020300 LJMP 0300
0026 00 NOP
00F6 00 NOP
00F7 D2B0 SETB RXD
00F9 D2B1 SETB TXD
00FB D2B2 SETB INT0
00FD D2B6 SETB WR
00FF D2B7 SETB RD
0100 758921 MOV TMOD,#21
0103 758B00 MOV TL1,#00
0106 758DF4 MOV TH1,#F4
0109 D28E SETB TR1
010B D2AF SETB EA
010D 758C3C MOV TH0,#3C
0110 758AB0 MOV TL0,#B0
0113 7582000 MOV DPL,#00
0116 7A00 MOV R2,#00
0118 D28C SETB TR0
011A D2A8 SETB EX0
011C 108D02 JBC TF0,0121
011F 80FB SJMP 011C
0121 0A INC R2
0122 758C3C MOV TH0,#3C
0125 758AB0 MOV TL0,#B0
0128 80F2 SJMP 011C
012A 00 NOP
01FF 00 NOP
0200 75F002 MOV B,#02
0203 EA MOV A,R2
0204 84 DIV AB
0205 F5F0 MOV B,A
0207 7A00 MOV R2,#00
0209 7805 MOV R0,#05
020B 7904 MOV R1,#04
020D C299 CLR TI
020F 85F099 MOV SBUF,B
0212 D2AC SETB ES
0214 32 RETI
0215 00 NOP
02FF 00 NOP
0300 C2AC CLR ES
0302 C299 CLR TI
0304 8983 MOV DPH,R1
0306 E0 MOVX A,@DPTR
0307 F599 MOV SBUF,A
0309 09 INC R1
030A B90701 CJNE R1,#07,030E
030D 09 INC R1
030E D801 DJNZ R0,0311
0310 32 RETI
0311 D2AC SETB ES
0313 32 RETI
0314 00 NOP
Математическое моделирование
Задачей математического моделирования является получение теоретических зависимостей выходной величины датчика (изменение частоты поверхностно-акустической волны) от входной величины (изменение концентрации необходимого газа) и получение изменения выходной величины в динамике (зависимость частоты от времени при скачкообразном изменении концентрации).
Изменение резонансной частоты, обусловленное наличием покрытия на поверхности распространения поверхностно-акустической волны, описывается следующим соотношением [2]:
![]() ,
,
где ![]() - сдвиг резонансной частоты за счет изменения чувствительным покрытием скорости поверхностно-акустической волны,
- сдвиг резонансной частоты за счет изменения чувствительным покрытием скорости поверхностно-акустической волны,
![]() и
и  характеристики пьезоэлектрического материала,
характеристики пьезоэлектрического материала,
![]() - начальная резонансная частота,
- начальная резонансная частота,
h - толщина чувствительного покрытия,
![]() - его плотность.
- его плотность.
Не трудно заметить, что произведение ![]() - представляет собой массу покрытия на единицу площади.
- представляет собой массу покрытия на единицу площади.
![]()
где m – масса покрытия;
s – площадь покрытия.
Таким образом, изменение частоты поверхностно-акустической волны зависит в первую очередь от двух факторов - массы единицы площади пленки и механических свойств пьезоэлектрической подложки.
Скорость изменения величины адсорбции со временем описывается следующим уравнением [21]:
![]()
где a – содержание адсорбируемого вещества – масса адсорбируемого вещества к единице объема адсорбента ![]() ;
;
by – коэффициент массоотдачи;
![]() - концентрации адсорбируемого вещества в парогазовой смеси инертного газа (входной параметр) .
- концентрации адсорбируемого вещества в парогазовой смеси инертного газа (входной параметр) .
![]() - концентрация адсорбируемого вещества в парогазовой смеси, равновесная поглощенному единицей объема количеству вещества
- концентрация адсорбируемого вещества в парогазовой смеси, равновесная поглощенному единицей объема количеству вещества ![]() . Определяется по изотерме адсорбции.
. Определяется по изотерме адсорбции.
Коэффициент массоотдачи определяется по следующему уравнению[21]:
![]()
где Nu – диффузионный критерий Нуссельта;
d – средний размер частиц адсорбента![]() ;
;
D – коэффициент диффузии вещества в газе![]() .
.
Значение диффузионного критерия Нуссельта для ориентировочных расчетов коэффициента массоотдачи определяется по критериальному уравнению [20]:
![]()
где Re – критерий Рейнольдса.
Для определения критерия Рейнольдса воспользуемся следующей формулой [20]:
![]()
где w – скорость потока на свободном сечении ![]() ;
;
![]() - кинематический коэффициент вязкости.
- кинематический коэффициент вязкости.
Кинематический коэффициент вязкости можно определить, пользуясь следующим соотношением [20]:
![]()
где ![]() - динамический коэффициент вязкости газа ;
- динамический коэффициент вязкости газа ;
![]() - плотность газа .
- плотность газа .
Для определения ![]() - концентрации адсорбируемого вещества в парогазовой смеси, равновесной поглощенному единицей объема количеству вещества воспользуемся изотермой адсорбции. Ввиду отсутствия необходимых табличных данных, описывающих как чувствительное полимерное покрытие, а как следствие, и отсутствие какого либо конкретного определяемого компонента, данная математическая модель ставит себе целью получение качественных характеристик описываемого ПАВ сенсора. Таким образом, за искомую изотерму адсорбции принимаем изотерму адсорбции бензола [20]. График данной изотермы приведен ниже.
- концентрации адсорбируемого вещества в парогазовой смеси, равновесной поглощенному единицей объема количеству вещества воспользуемся изотермой адсорбции. Ввиду отсутствия необходимых табличных данных, описывающих как чувствительное полимерное покрытие, а как следствие, и отсутствие какого либо конкретного определяемого компонента, данная математическая модель ставит себе целью получение качественных характеристик описываемого ПАВ сенсора. Таким образом, за искомую изотерму адсорбции принимаем изотерму адсорбции бензола [20]. График данной изотермы приведен ниже.
В качестве определяемого компонента воздушной смеси принят аммиак.
Зависимость концентрации от парциального давления компонента выражается следующей формулой [20];
![]()
где p – парциальное давление компонента в газовой смеси;
R – универсальная газовая постоянная;
Т – абсолютная температура.
Подставляя числовые значения всех вышеперечисленных переменных в уравнение скорости адсорбции, а величину адсорбции в уравнение изменения частоты поверхностно-акустической волны и добавив к этому начальные и граничные условия получаем искомые зависимости величины адсорбции от времени и изменение частоты от времени.
Как видно из приведенных ниже графиков, время реакции сенсора на скачкообразное изменение концентрации определяемого компонента составляет порядка 10-5 сек.
 |
 |
Таким образом, в будущих исследованиях инерционностью процессов, происходящих в самом датчике можно пренебречь. А основное время процесса будет состоять из времени определения частоты поверхностно-акустической волны, времени подвода газа необходимой концентрации и пр. Таким образом, получаем еще одно подтверждение необходимости дальнейшего повышения автоматизации измерительной установки.
Для математического получения градуировочной характеристики ПАВ датчика воспользуемся уравнением [20]:
![]()
И подставив полученное тем самым значение величины адсорбции в уравнение зависимости изменения частоты поверхностно-акустической волны, получим градуировочный график.
 |
Как видно из этого графика, зависимость изменения частоты поверхностно-акустической волны от концентрации – величина линейная. Таким образом получаем еще одно подтверждение перспективности использования поверхностно-акустических датчиков в качестве газовых сенсоров низких концентраций.
Экспериментальные результаты
Для оценки точности показаний ПАВ сенсора возникает необходимость оценить влияние различных параметров на частоту. В ходе работы был проведен ряд экспериментов по выявлению такого влияния.
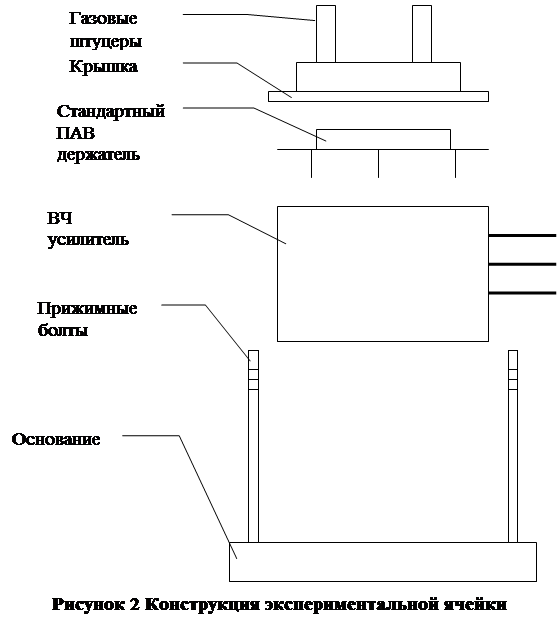
В ходе работы была проведена серия экспериментов по определению стабильности частоты ПАВ преобразователей. Для этого они закреплялись в экспериментальную ячейку, конструкция которой описана в выше. Методика проведения экспериментов заключалась в следующем. Измерения частоты производились непрерывно в течение двух с половиной часов.
В течение времени измерений, данные об изменении частоты фиксировались каждые пять минут. Характерный ход зависимости частоты поверхностно-акустической волны от времени представлен на рис. 17. Как видно из данной зависимости, частота ПАВ преобразователя первоначально имеет тенденцию увеличиваться. Увеличение частоты поверхностно-акустической волны за первые 20-30 минут наблюдений составило порядка 2 – 2.5 кГц. По прошествии этого времени частота колеблется в гораздо более низких пределах. Изменения частоты в это время происходят в пределах нескольких десятков герц. Небольшой рост частоты объясняется нагревом кристалла кварца нагревающимся в процессе эксперимента ВЧ усилителем Ч3-63. Разные значения установившихся частот поверхностно-акустической волны объясняются различной температурой в помещении.
Таким образом, было выяснено, что для проведения исследования необходимо предварительно провести прогон измерительной системы в течение 20-30 минут. Также было выяснено, что с увеличением температуры частота также имеет тенденцию увеличиваться.
Также в ходе работы была проведена серия экспериментов, целью которых было выяснение влияния давления на частоту ПАВ сенсора. Методика эксперимента заключалась в следующем. После предварительной прогонки ячейки на холостом ходу, как было указано выше, ее ступенчато откачивали на вакуум. Величина вакуума в ячейке фиксировалась при помощи вакуумметра. После чего показания частоты фиксировались каждые 10 секунд. По прошествии 120 секунд после окончании переходных процессов значения частоты устанавливались на определенном уровне и дальше не менялись. После чего ячейку снова откачивали до нового значения вакуума.
График откачки ячейки на вакуум и зависимости частоты ПАВ сенсора от времени переходных процессов показаны на рис. 18
|
|
Так же в работе представлен график зависимости частоты ПАВ сенсора от давления в газовой ячейке. Данный график построен на основании предыдущего. По оси абсцисс откладывалось давление в ячейке в мм. рт. ст., по оси ординат – частота ПАВ сенсора после окончания переходных процессов. Данный график представлен на рис. 19
Данные зависимости были получены при температуре окружающей среды – 17 0С и атмосферном давлении 749 мм. рт. ст.
Как видно из приведенных графиков, частота ПАВ сенсора практически линейно изменяется с давлением в диапазоне 100 – 500 мм. рт. ст., в то время, как характер зависимости существенно меняется по мере выхода за указанный диапазон.
Следует отметить, что проведение экспериментов сопряжено с достаточно высокой трудоемкостью, что еще раз указывает на необходимость модернизации экспериментальной установки путем сопряжения ее с ЭВМ.
Экономическая часть
Задача данной работы заключается в разработке и исследовании поверхностно-акустического датчика. Экономический аспект данного исследования заключается в том, что:
Современные методы контроля концентрации вредных веществ в атмосфере не позволяют определить концентрацию с достаточной точностью, а лабораторные исследования представляются малоэффективным в первую очередь из-за своей дороговизны.
Закупка подобного рода оборудования также представляется невозможным из-за дороговизны закупаемого оборудования и таможенных пошлин.
В то время, как за рубежом исследования перспективных направлений в области обнаружения и определения малых концентраций токсичных веществ выходит на все более ведущее место [20], отечественные разработки отличаются разобщенностью и неполнотой.
В силу приведенных выше причин экономический аспект данного исследования представляется очевидным, а внедрение самого сенсора в производство экономически выгодным и перспективным.
Техника безопасности
Так как данный сенсор разрабатывается для анализа состава атмосферного воздуха на предмет наличия в нем вредных газовых примесей, то при разработке сенсора приходится иметь дело с газовыми смесями, содержащими данные компоненты.
Среди данных компонентов можно выделить окись углерода, окислы азота, оксиды серы, различного рода углеводороды и пр.[22]
Так как данные компоненты являются токсичными [22], то при работе с этими компонентами необходимо соблюдать следующие положения техники безопасности:
Все работы с газами производить под вытяжным шкафом.
Не допускать превышения концентрации данных компонентов в лаборатории свыше предельно-допустимых норм.
Регулярно производить проветривание помещений.
При выполнении вышеперечисленных правил, ваша работа в лаборатории не будет омрачена несчастными случаями.
Выводы
За время выполнения магистерской работы было выполнено следующее:
Проработан необходимый объем теоретического материала для конкретизации задач диссертации.
Доказана необходимость повышения автоматизации экспериментальной установки для более эффективной исследовательской работы и повышения точности получаемых результатов.
Разработана схема сопряжения установки с персональной ЭВМ и разработана схема устройства сопряжения.
Разработан алгоритм и отлажена программа, обслуживающая данное устройство сопряжения.
Разработан алгоритм и написана программа, позволяющая обрабатывать поступающую с экспериментальной установки информацию.
Список использованных источников
Беспалов А. Е., Соборовер Э. И., Швандеров А. Ф. «Исследования сенсорных свойств чувствительного элемента на поверхностно-акустических волнах» // Вестник Нижегородского государственного университета им. Н. И. Лобачевского. Сер. «Физика твердого тела» 1999г.
Соборовер Э. И., Швандеров А. Ф. «Возможности сенсора на ПАВ в контроле параметров газовых сред» // В. Сб.: Материалы XII научно-технической конференции с участием зарубежных специалистов / под ред. проф. Азарова В. Н. М.: МГИЭМ 1999г.
Wohltjen H., Dessy R. “Surface acoustic wave probe for chemical analysis.” // Anal. Chem. 1979 V. 51 #9 P. 1458-1464.
Snow A., Wohltjen H. “Poly(ethylene maleate)-cyclopentadiene: a model reactive polymer-vapour system for evaluation of a SAW microsensor.” // Anal. Chem., 1984, V. 56, #8, P. 1411-1416.
Benes E., Groschl M., Seifert F., Pohl A. “Comparison between BAW and SAW sensors.” // 1997 IEEE International Frequency Control Symposium.
Rapp M., Stier S., Ache H. “Classification of odours and spoiling detection of food with analytical microsystem based on SAW devices” // Pittcon’96, Chicago, March 3-8 1996: Book abstr-Chicago (|||), 1996, P. 947.
Hayt A. E., Ricco A. J., Iang H.L., Crooks R. H. “Speciation of linear and branched hydrocarbons by fluorinated polyamin film-based SAW sensor” // JACS, 1995, V. 117, #33, P. 8672-3
Mitsud J., Mog L. “Procedes et apparells de detection des substances odorantes et applications” // ALPHA M.O.S. # 9311291, 17.09.93. on 24.03.95.
Florian Bender and Reiner Dahint “Characteristics of Acoustic plate modes on rotated Y-cuts of quartz utilized for biosensing applications” // Anal. Chem., 1999, 71, 5064-5068.
Joshua J. Caron, Thomas D. Kenny, L. Jay LeGore, Derek G. Libby, Carl J. Freeman and John F. Vetelino “A surface acoustic wave nitric oxide sensor” 1997 IEEE International frequency control symposium.
Joshua J. Caron, Reichl B. Haskell, Derek G. Libby, Carl J. Freeman and John F. Vetelino “A surface acoustic wave mercury vapor sensor” 1997 IEEE International frequency control symposium.
R. Andrew McGuill, Douglas B. Chrisey, Todd E. Mlsha, Jennifer L. Stepnowski, Russel Chung & Nector Cobal. “Performance optimization of surface acoustic wave chemical sensors” 1997 IEEE International frequency control symposium.
H. Wohltjen, N. L. Jarvis, A. Snow, W. Barger, J. Guiliani, D. Dominiques. “Chemical microsensors for vapour detection”.
Zvi Liron, Nathali Kanshanski, Gad Frishman, Doron Caplan, and Jeremy Greenblatt. “The polimer-coated SAW sensor as a gravimetric sensor”. Anal. Chem. 1997, 69, 2848-2854
Wohltjen N., Davis N., Busey B., Klusty M., Soling R., McKeee // Pittsburgh Conf. Anal. Chem. Chem and Appl. Specrtosc. Orlando, Flaa, March 7 – 12, 199 PITTCON’99: Book Abstr – [Orlando (Fla)]. 1990 – C722.
Р. Джордейн «Справочник программиста персональных компьютеров типа IBM PC, XT и AT». Перевод с английского. Москва. «Финансы и статистика» 1992 г.
Бочков С. О., Субботин Д. М. «Язык программирования СИ для персонального компьютера». Под общей редакцией канд. техн. Наук, доцента П. И. Садчикова. Москва СП «Диалог» «Радио и связь». 1990 г.
П. Нортон, Р. Уилтон «IBM PC и PS/2 руководство по программированию». Перевод с английского. Москва «Радио и связь» 1994 г.
П. Абель «Язык ассемблера для IBM PC и программирования». Перевод с английского. Москва. Высшая школа. 1992 г.
А. А. Шульга, Б. К. Зуев, В. В. Лонцов «Цеолитосодержащие чувствительные покрытия для газовых химических сенсоров на поверхностно акустических волнах» 1999г.
Павлов К. Ф., Романков Н. Г., Носков А. А. «Примеры и задачи по курсу процессов и аппаратов химической технологии. Учебное пособие для вузов» Л.: Химия, 1987.
Д. П. Никитин, Ю. В. Новиков «Окружающая среда» Москва. «Высшая школа» 1980г.
Похожие работы
... можно пренебречь. А основное время процесса будет состоять из времени определения частоты поверхностно-акустической волны, времени подвода газа необходимой концентрации и пр. Таким образом, получаем еще одно подтверждение необходимости дальнейшего повышения автоматизации измерительной установки. Для математического получения градуировочной характеристики ПАВ датчика воспользуемся уравнением [20]: ...


... матрицах. Такого эффекта удалось достигнуть благодаря применению специальной синей фосфоресцирующей химической составляющей. Важно и то, что по утверждению инженеров Mitsubishi процесс производства с использованием новой технологии относительно недорог. В отличие от ЖК-панелей, работающих «на просвет», дисплеи OLED не требуют ламп подсветки. Каждый элемент OLED-матрицы светится самостоятельно. ...


... возможность работать с компьютером, набирая текст на клавиатуре и считывая информацию прямо с экрана. Преимущества подобной технологии были очевидны: экономилась бумага – это раз, из-за отсутствия электромеханических устройств ввода-вывода возросла скорость обмена информацией – это два. Стало понятно, что именно такой способ общения с компьютером наиболее удобен, а это значит, что печатная ...
... в конструкции сенсорной части нескольких молекулярных слоев. Тем не менее "молекулярный дизайн" при конструировании биосенсоров будущего может составить реальную конкуренцию объемному их варианту. Где применяют биосенсоры По-видимому, самым распространенным в настоящее время является амперометрический биосенсор на основе иммобилизованной глюкозоксидазы для определения сахара в крови. ...
0 комментариев