Навигация
КОНФІГУРАЦІЙНА СХЕМА СИСТЕМИ
22577
знаков
6
таблиц
29
изображений
4. КОНФІГУРАЦІЙНА СХЕМА СИСТЕМИ
4.1 Вибір закону регулювання
Процес автоматичного регулювання визначається динамічними властивостями об’єкта регулювання, характером збурюючих впливів, типом автоматичного регулятора і величинами його параметрів настройки. Досить важливим моментом являється правильний вибір типу регулятора, закону регулювання і правильна настройка регулятора. Вибір регулятора з тим чи іншим законом регулювання визначається вимогами технологічного процесу, що проходить в об’єктах, до якості автоматичного регулювання, тому в першу чергу визначається принцип дії регулятора: неперервний, релейний та імпульсний. У відповідності із спрощеною інженерною методикою можна вибирати той чи інший вид системи регулювання в залежності від динамічних властивостей об’єкта: часу чистого запізнення ![]() і постійної часу об’єкта регулювання T. До законів безперервного регулювання відносяться:
і постійної часу об’єкта регулювання T. До законів безперервного регулювання відносяться:
Ø П-закон регулювання (пропорційний);
Ø І-закон регулювання (інтегральний);
Ø ПІ-закон регулювання (пропорційно - інтегральний);
Ø ПД- закон регулювання (пропорційний - диференціальний);
Ø ПІД- закон регулювання (пропорційно-інтегрально-диференціальний).
Пропорційна частина - забезпечує швидкодію регулятора.
Інтегральна частина – забезпечує точність регулювання.
Диференціальна частина – забезпечує якість регулювання.
Для регулювання густини вапняного молока використаємо регулятор з ПІ законом регулювання, тому що цей регулятор має високу точність регулювання і час регулювання буде набагато меншим ніж у інтегрального регулятора.
4.2 Вибір перехідного процесу
Більшість об’єктів регулювання в харчовій промисловості володіють достатнім самовирівнюванням (властивість об’єкта самостійно, без зовнішнього впливу встановлювати нове постійне значення вихідної змінної) і з достатньою для практики точністю розглядаються як аперіодичні ланки першого порядку із запізненням. Знаючи параметри об’єкта регулювання можна вибрати перехідний процес. Серед різноманіття перехідних процесів вибрані три найбільш характерних, які прийняті в якості типових:
1. Аперіодичний процес з мінімальним часом регулювання
2. Процес з 20-% перерегулюванням і мінімальним часом першого напівперіода коливання
3. Процес з мінімальною квадратичною площею відхилення.
Аперіодичний процес можна рекомендувати при регулюванні технологічних параметрів, коли основними вимогами до якості є скорочення тривалості перехідних процесів, виключення перерегулювання. Недоліком цього процесу в порівнянні з іншими типовими процесами є найбільше значення динамічної похибки.
Процес з 20% перерегулюванням, що застосовується найбільш часто при розробці систем регулювання, забезпечує ефективне зниження динамічної похибки і порівняно малу хвилю регулювання.
Процес з мінімальною квадратичною площею відхилення характеризується найменшим значенням динамічної похибки, але має 40%- перерегулювання і найбільш тривалий час регулювання.
Кожен з цих процесів може бути забезпечений будь-яким типовим регулятором неперервної дії, але основні величини, що характеризують якість регулювання, повинні мати при цьому різні числові значення.
Для регулювання густини вапняного молока я вибрав процес з 20% перерегулюванням, тому що цей процес застосовується найбільш часто при розробці систем регулювання, забезпечує ефективне зниження динамічної похибки і порівняно малу хвилю регулювання.
4.3 Розрахунок параметрів настройки регулятора
Для того щоб побудувати САР об’єкта потрібно знати параметри настройки регулятора. Знаючи параметри об’єкта регулювання за відповідними формулами можна розрахувати параметри настройки регулятора, які дозволять скласти моделі САР за збуренням та за відхиленням. В даному об’єкті використовується пропорційно-інтегральний регулятор з 20-% перерегулюванням. Для розрахунку використовуються такі формули, взяті з таблиць:![]() ;
; ![]() . Підставивши в ці формули значення параметрів, знайдених з кривої розгону за каналом управління ми зможемо знайти коефіцієнт інтегрування і коефіцієнт пропорційності
. Підставивши в ці формули значення параметрів, знайдених з кривої розгону за каналом управління ми зможемо знайти коефіцієнт інтегрування і коефіцієнт пропорційності
![]()
![]()
![]()
Після знаходження параметрів настройки регулятора будуємо структурну схему ПІ-регулятора

Рисунок4.1 Структурна схема ПІ-регулятора
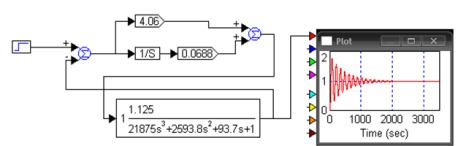
Рисунок4.2 Структурна схема ПІ-регулятора за відхиленням
Рисунок4.3 Графік ПІ-регулятора за відхиленням
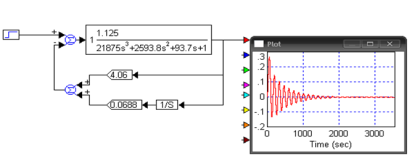
Рисунок4.4 Структурна схема ПІ-регулятора за збуренням
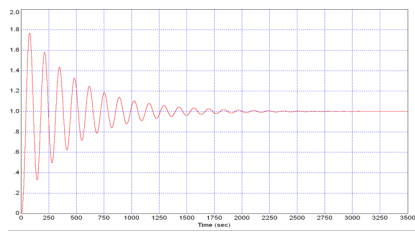
Рисунок4.5 Графік ПІ-регулятора за збуренням
ПІ-регулятор складається з пропорційної та інтегральної частини і на основі його структурної схеми можна отримати загальну передаточну функцію регулятора. Для цього необхідно переведення передаточних ланок системи.

Отримавши передаточну функцію регулятора побудуємо структурну схему одноконтурної системи автоматичного регулювання

Рисунок4.6 Структурна схема одноконтурної САР за відхиленням
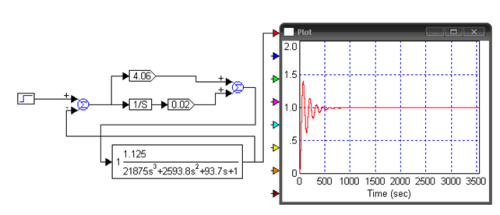
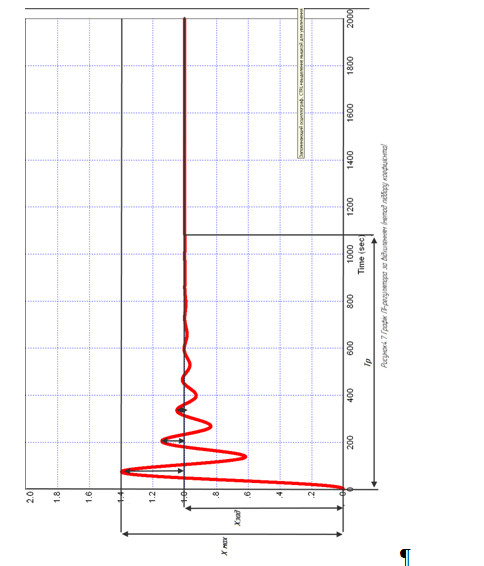
Рисунок 4.7 Структура ПІ-регулятора за відхиленням (метод підбору коефіцієнта).
Похожие работы
... . Варять не більше 20 хв. М'ясний порошок — однорідна маса, отримана подрібненням сухого м'яса, колір світло-коричневий. Варять не більше 5 хв. Волога в порошку не більше 10%, упаковка герметична. ЛЕКЦІЯ ПО ТОВАРОЗНАВСТВУ РИБИ 1.Характеристика сімейств риб Промислові риби класифікують по декількох ознаках. По способу і місцю життя риби ділять на морських, прісноводих, напівпрохідні і прох ...
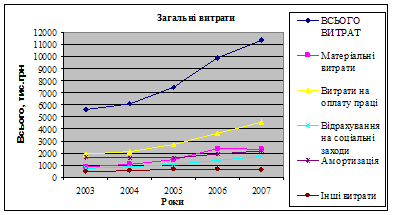
... метою дипломного проекту є обґрунтування реального інвестиційного проекту підприємства. Основними задачами, що необхідно вирішити для досягнення поставленої мети є: Ø аналіз економічних показників роботи підприємства у тому числі витрат на ремонти; Ø прогнозування витрат на 2008 рік; Ø проаналізувати необхідність здійснення реального інвестиційного проекту на підприє ...
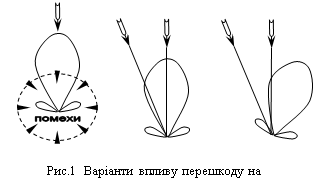


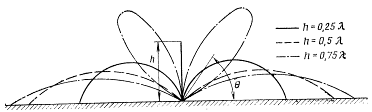

... зниження антени АВ і А|В|, де струми мають однакові напрямки. Антена в цьому варіанті працює в режимі земного випромінювання (рис.17б). Антена зенітного випромінювання КШМ Р-142Н (рис.18) являє собою систему з двох рознесених вертикальних синфазних П-подібних рамок, з'єднаних у нижній частині поперечними штангами. До них підключається блок узгодження (БС) і блок регулювання(БР). Як ...
0 комментариев