Навигация
Анализ эффективности применения комплекса помех и средств помехозащиты
21432
знака
2
таблицы
14
изображений
6. Анализ эффективности применения комплекса помех и средств помехозащиты
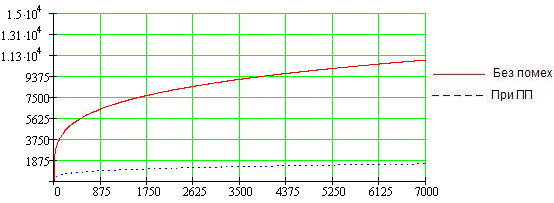
Мерой эффективности режекторного фильтра служит достигнутый, коэффициент подавления. В нашем случае он равен 48.71 дБ, т.е. сигнал помехи от земной поверхности фильтр подавляет до уровня шумов. Таким образом, помеха практически полностью исключается из дальнейшей обработки. Однако надо заметить, что в месте с помехой будет режектирован также сигнал от малоскоростных целей и целей имеющих только тангенциальную составляющую скорости, летящих перпендикулярно направлению излучения РЛС.
Также критерием эффективности служит коэффициент улучшения отношения с/п, в спроектированном фильтре он составляет 31.04 дБ, что означает превышение отношения с/п на выходе над с/п на входе более чем в тысячу раз.
Эффективность постановки уводящей помехой, определяется снижением вероятности правильного обнаружения. Допустим, в нормальном режиме РЛС может обнаруживать 100 целей, если постановщик ставит еще 50 ложных целей, то вероятность правильного обнаружения снижается в 1.5 раза.
7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон.
Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту обработку.
Цифровые режекторные гребенчатые фильтры (ЦРГФ) подавления помех требуют предварительного преобразования сигналов в цифровую форму с помощью АЦП. В таких устройствах производиться дискретизация по времени, с дискретом ![]() . Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета
. Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета ![]() , где m- число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
, где m- число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
Аналогичные требования предъявляются и к быстродействию АЦП РПрУ устройства постановки помех.
Требования к устройствам ВОИ менее жесткие, так как, например, индикатор кругового обзора (ИКО) должен обновлять информацию через время обзора.
8. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
Техническая реализация фильтровых устройств возможна на фильтрах с быстрым преобразованием Фурье (БПФ), а также на микропроцессорах DSP. Всё большую роль в цифровой обработке РЛИ начинают играть программируемые логические интегральные микросхемы (ПЛИС), которые обладают гибкой структурой и возможностью смены программы, в отличие, например от микропроцессоров.
Несколько слов об АЦП. В настоящее время быстродействие использующихся образцов характеризуется частотой дискретизации ![]() , например, АЦП AD 6644 фирмы Analog Device (США) имеет
, например, АЦП AD 6644 фирмы Analog Device (США) имеет ![]() , при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала до 39 МГц.
, при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала до 39 МГц.
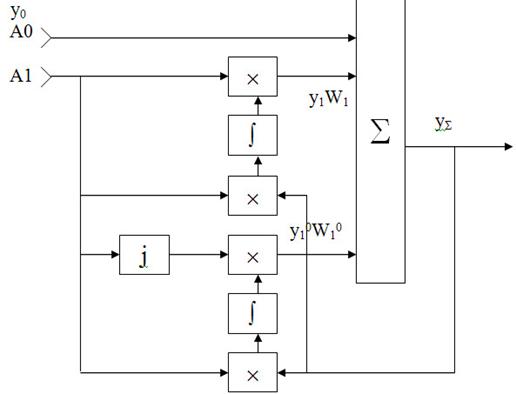
Типовая реализация устройства обнаружителя движущихся целей (ОДЦ) многоканально по дальности (m = 2000 каналов), рис.7. После подавления помех используется оптимальная, междупериодная обработка сигнала на фоне белого шума. Обычно применяют когерентное накопление остатков вычитания. При этом вводится поправка в фазу сигнала для компенсации движения цели.
Каналы дальности реализуются либо с помощью селекторов дальности в УПЧ, либо с помощью коммутации ячеек ОЗУ.

Селекторы дальности (СД) обеспечивают поступление в каждый из m каналов сигналов только с одного элемента разрешения по дальности. С подавлением помех в ЦРГФ информация записывается в ОЗУ, а затем фильтруется на основе n-точечного алгоритма БПФ, пусть даже с неоднозначностью по скорости. Причем n = N-Kф = 42-7 = 35, где N- количество импульсов в пачке, а Кф - порядок режекторного фильтра.
9. Составление структурной схемы устройства и описание её работы
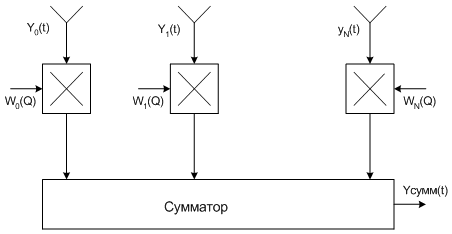
Упрощённая структурная схема устройства постановки уводящих помех изображена на рис.8. В разведывательном радиоприёмном устройстве (РПрУ) производиться измерение параметров подавляемой РЛС. Генератор (Г), генерирует колебания несущей частотой равной несущей РЛС.

Детектор выделяет огибающую сигнала РЛС. После детектора сигнал подаётся на управляемые линии задержки. Блок управления задержками (БУЗ) предназначен для согласования временных параметров постановки помех на различных дальностях.
Огибающие, задержанные на соответствующее время, подаются на модуляторы, в которых обеспечивается уже согласование по энергетическим параметрам генерируемой помехи.
В дальнейшем, промодулированный соответствующим образом сигнал, поступает на сумматор, осуществляющий объединение мощностей и излучается в пространство.
На практике, осуществляться преобразование огибающей сигнала в цифровую форму, и запоминание в ОЗУ, что позволяет генерировать сигнал помехи в любой момент времени, не измеряя вновь параметров РЛС.
10. Заключение
В ходе выполнения курсовой работы были получены ценные навыки расчета параметров РЭС разных сторон РЭ конфликта, а также навыки анализа эффективности подавления и помехозащиты. Был произведен эскизный расчёт РЛС и параметров помехозащиты. Определена структура средств помехопостановки и помехозащиты.
Таким образом, курсовая работа достигла всех поставленных целей и задач.
Список использованных источников
1. Бакулев П.А. Радиолокационные системы. - М.,: Радиотехника, 2004 г.
2. Радзиевский В.Г. Сирота А.А. Теоретические основы радиоэлектронной разведки. - М.,: Радиотехника, 2004 г.
3. Гоноровский И.С. Радиотехнические цепи и сигналы. – М.: Радио и связь, 1986 г.
4. Кузьмин С.З. Цифровая обработка РЛИ. – М.: Советское радио, 1967 г.
5. Воскресенский Д.И. Антенны и устройства СВЧ. – М.: Радио и связь, 1981 г.
Графические материалы
Структурная схема РЛС дальнего обнаружения (Во избежание излишней детализации, устройства дальнейшей обработки, не рассматривавшиеся в данной курсовой работе, не показаны, в виду их очевидности).

Похожие работы



... . Ко второму типу относятся РЛС управления объектами по данным радиолокационных измерений, такие как РЛС управления воздушным движением. 2). Анализ задачи и ее формализация Основываясь на требованиях технического задания нам необходимо создать средства постановки помех и помехозащиты для радиолокационной станции управления воздушным движением работающей по трем координатам: дальности, ...
... на выходе над с/п на входе на значительную величину. 6. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту ...
... параметры обнаружения. Поскольку принимаемая пачка из N импульсов является когерентной, то . 2. Расчет параметров помехопостановщика 2.1 Расчет мощности передатчика заградительной и прицельной помех помеха помехозащита радиолокационная станция Можно выделить несколько основных типов передатчиков заградительных помех: прямошумовые передатчики; передатчики помех, использующие мощный ...





... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
0 комментариев