Навигация
Расчет параметров средств создания уводящих помех
29373
знака
18
таблиц
1
изображение
2.2 Расчет параметров средств создания уводящих помех
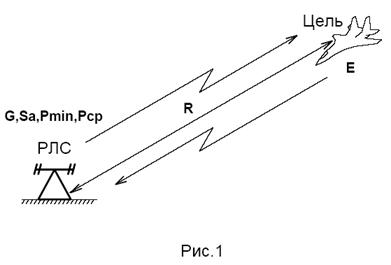
Уводящие помехи (УП) относятся к классу активных помех (АП). Их применение приводит к перегрузке устройств обработки информации РЛС и срыву сопровождения целей. Идея использования УП основана на генерации мощных ответных помех с изменяющимися по определенному закону интервалом задержки (УП по дальности), частотой (УП по скорости) или обоими параметрами (УП по дальности и скорости). Постановка УП включает в себя два этапа:
1). На дальности, соответствующей реальной цели, формируется мощная ответная помеха. Ее прием приводит к срабатыванию системы автоматической регулировки усиления (АРУ) приемного устройства РЛС, а затем к захвату ложной цели и срыву сопровождения реального воздушного объекта.
2). В каждом такте зондирования у ответной помехи изменяется временная задержка и/или частота, что приводит к эффекту сопровождения маневрирующего объекта.
Скорость увода не должна превышать максимально возможную скорость перестройки строба дальности РЛС, в противном случае следящая система автоматически сбросит с автосопровождения сигнал помехи.
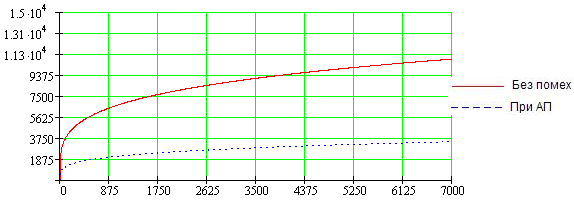
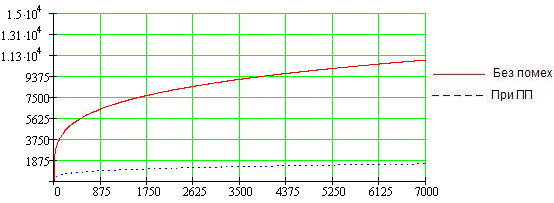
Основным способом защиты РЛС от уводящих помех по дальности и скорости является использование пороговых алгоритмов, вычисляющих рассогласование характеристик движения целей, определяемых на основе оценок скорости по доплеровскому сдвигу частот и дифференцирования текущих значений дальности до цели. Обнаружение рассогласования позволяет своевременно производить сброс сопровождения УП и автоматический перезахват сигнала реальной цели. Различают следующие критерии:
дальностный пороговый
 ,
,
скоростной пороговый
![]()
и пороговый по ускорению
![]() ,
,
где константы СпорR, СпорV, СпорА – величины порогов принятия решений о наличии воздействия УП. Величины порогов выбираются с таким расчетом, чтобы ошибки измерения соответствующих величин (дальности, скорости и ускорения) не приводили к частым ложным тревогам.
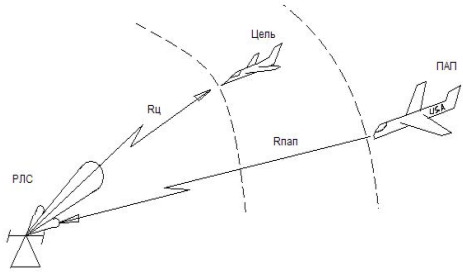
В связи с этим обстоятельством для эффективного подавления РЛС на постановщике уводящих помех необходимо согласование параметров УП по дальности и скорости.
Пусть требуется создание ложной цели (ЛЦ), движущейся с ускорением. Уравнение движения ЛЦ:
х(t) = ±а×t2/2 ± V×t+x0,
где х0 – начальное положение ЛЦ, V и а – ее радиальные скорость и ускорение соответственно. Для создания такой ЛЦ необходимо вырабатывать мощную ответную помеху с изменяющимся во времени интервалом задержки tЗ(t). Интервал задержки для определенного ранее уравнения движения запишется:
tЗ(t)=2×x(t)/c
или
tЗ(t)= ![]() a×t2/c
a×t2/c ![]() 2×V×t/c + t0,
2×V×t/c + t0,
где t0=2×x0/c – начальное значение интервала задержки. Смена знака перед выражениями, содержащими скорость и ускорение ЛЦ, связана с уменьшением времени задержки отраженного сигнала при «приближении» ЛЦ к РЛС и увеличением при ее «удалении» соответственно.
Поскольку в подавляемой РЛС может быть предусмотрено однозначное определение скорости по доплеровскому сдвигу частот принимаемого сигнала, необходимо учесть данное обстоятельство при создании УП. Частота излучаемого постановщиком УП сигнала должна меняться по закону
f(t)=f0±2×(V+a×t)×f0/c,
где f0 = c/l – рабочая частота РЛС (при этом угол между вектором скорости/ускорения и радиальным направлением на РЛС полагается равным нулю).
При создании УП следует отводить некоторый временной промежуток t1 на срабатывание системы АРУ приемника РЛС и захват мощной ответной помехи. Поэтому окончательные законы изменения времени задержки и частоты УП соответственно представимы в виде
 ;
;
 ,
,
где TУП – время, отводимое на постановку помехи.
Предположим, на некоторой дальности R необходимо создание ЛЦ, имеющей начальную скорость V=600 м/с и ускорение а=0,5×g=4,9 м/с; время, отводимое на постановку УП, составляет ТУП=5 с, из них в течение t1=0,5 с характеристики ответной помехи не изменяются. Произведем оценку эффективности применения УП с выбранными параметрами. Максимально достижимая дальность увода:
Smax = a×(ТУП-t1)2/2+V×(ТУП-t1)=4,9×(5-0,5)2/2+600×(5-0,5)=2750 м,
то есть цель уводится из дальностного канала с номером N1 в канал N2=N1±5.
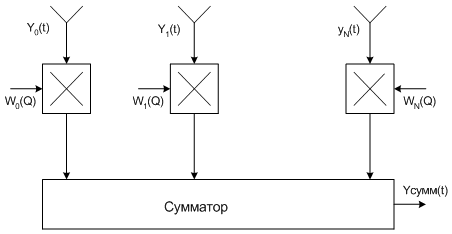
Структурная схема передатчика УП, согласованных по дальности и скорости, приведена на рис. 3.
Похожие работы

... то Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно. Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и ...



... целей, то вероятность правильного обнаружения снижается в 1.5 раза. 7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон. Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств ...
... на выходе над с/п на входе на значительную величину. 6. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту ...





... защиты от УП является введение в РЛС режима сопровождения слабого сигнала, при котором при воздействии ответной помехи (первый этап в постановке УП) продолжается сопровождение менее мощного сигнала от цели. 5. Анализ эффективности применения комплекса помех и средств помехозащиты При воздействии только пассивных помех с рассчитанными в пункте 4.1 параметрами отношение сигнал/помеха на входе ...
0 комментариев