Навигация
Функціональна схема та математична модель слідкувальної системи
50871
знак
0
таблиц
14
изображений
2.2 Функціональна схема та математична модель слідкувальної системи
ССП аналогової дії складаються із таких функціонально необхідних елементів: сельсин вимірювальний пристрій, який складається з сельсин-датчика (СД) та сельсин-приймача (СП); вимірювачі кутових швидкостей (тахогенератори); перетворюючі та підсилюючі елементи (фазочутливий випрямляч та електромагнітний підсилювач); виконавчі елементи (електродвигун постійного струму). [3]
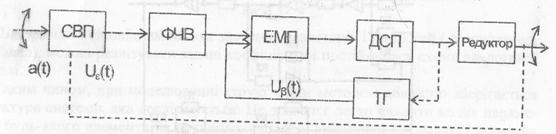
Рисунок 2.1 - Функціональна схема ССП з аналоговим управлінням
Після визначення передаточних функцій елементів ССП, складемо структурну схему силового слідку вального приводу.
На схемі(Рисунок 2.1 ) функціонально необхідні елементи описуються такими передаточними функціями:
Kсвп(P) = Kст ,
де Ксвп – коефіцієнт сельсин вимірювального пристрою;
Kфчп(P) = Kфчп ,
де Кфчп – коефіцієнт фазочутливого випрямляча;
Kемп(P) = ![]() ,
,
де Кемп – коефіцієнт електромагнітного підсилювача, Темп – постійна часу електромашинного підсилювача;
Kд(P) = ![]() ,
,
де Кд – коефіцієнт перетворення ДПС, Тд – постійна часу ДПС;
Kред(P) = Kред ,
де Кред – коефіцієнт редуктора;
Kтг(P) = ![]() ;
;
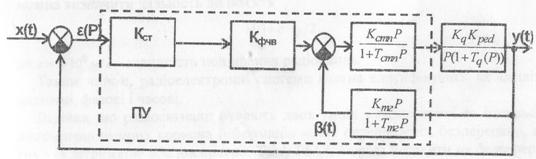
Рисунок 2.2 - Структурна схема ССП
Без урахування тахогенератора ССП описується передаточною функцією розімкненої системи третього порядку
Kp(P)= ![]() ,
,
де Kv = Kст Kфчп Kемп Kд Kред – коефіцієнт перетворення до швидкості.
Для того щоб розрахувати математичну модель ССП нам потрібно знати дані для двигуна, електромашинного підсилювача та коефіцієнт підсилення.
В якості двигуна постійного струму обираємо двигун марки МИ-31та проводимо його розрахунок для визначення необхідних нам параметрів.
Початкові дані:
Pн = 0.2 кВт – номінальна потужність
R = 1.32 Ом – опір ланцюга якоря
Uн = 60 В - напруга
nн = 1000 ![]() - швидкість обертання
- швидкість обертання
J = 9.18*![]() кгм*
кгм*![]() - момент інерції
- момент інерції
Iн = 4.4 A – струм якоря
Розрахунок параметрів:
1. Номінальний момент двигуна
Мн = 975*![]() = 975*
= 975*![]() = 0,195 кг*м
= 0,195 кг*м
2. Постійна часу двигуна за моментом
Cм = ![]() =
= ![]() = 0,0443 кг*м/А
= 0,0443 кг*м/А
3. Номінальна швидкість двигуна
ωн = ![]() =
= ![]() = 105 рад/с
= 105 рад/с
4. Швидкість холостого руху ДПС
ωхр = ![]() =
= ![]() = 113 рад/с
= 113 рад/с
5. Постійна двигуна проти-е.р.с.
Се = ![]() =
= ![]() = 0,53 В*с/рад
= 0,53 В*с/рад
6. Коефіцієнт перетворення ДПС
Kд = ![]() =
= ![]() = 1,89 рад/В*с
= 1,89 рад/В*с
7. Постійна часу ДПС
Тд = ![]() =
= ![]() = 0,05 с
= 0,05 с
Після проведених розрахунків ми можемо скласти передаточну функцію знаючи, що
Кд = 1,89 рад/В*с – коефіцієнт перетворення ДПС
Тд = 0,05 с – постійна часу ДПС
Кемп = 2 В/мА – коефіцієнт перетворення електромашинного підсилювача
Темп = 0,015 с – постійна часу електромашинного підсилювача
Кп = 20 – коефіцієнт підсилення
Отже передаточна функція ССП (без тахогенератора) буде мати такий вигляд:
Kp(P) = ![]()
Формалізована модель дослідження стійкості та якості перехідних процесів слідкувальної системи
Формалізація приведення інформації зв’язаної з виділеними властивостями, до вибраної форми.
![]()
![]() внутрішні впливи; зовнішні впливи.
внутрішні впливи; зовнішні впливи.
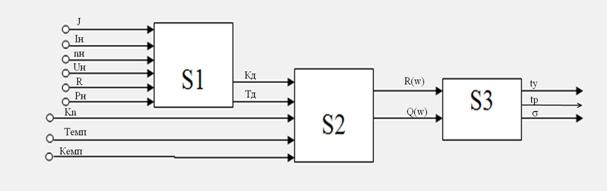
Рисунок 2.3 - Модель підтримки прийняття рішень з оптимального керування процесами системи
Блок S1. Розрахунок характеристик двигуна
Вхідними даними є:
Номінальна потужність; - опір ланцюга якоря; - напруга; - швидкість обертання; - момент інерції; - струм якоря.
Вихідними параметрами є: - коефіцієнт перетворення ДПС; - постійна часу ДПС.
Блок S2. Розрахунок дійсної та уявної частини передаточної функції
Вхідними є: - коефіцієнт перетворення ДПС; - постійна часу ДПС; - коефіцієнт підсилення; - постійна часу електромашинного підсилювача; - коефіцієнт перетворення електромашинного підсилювача.
Вихідними параметрами є: - дійсна частина; - уявна частина.
Блок S3 визначення характеристик
Вхідними є: - дійсна частина; - уявна частина
Вихідними: - час установлення; - час регулювання; - час перерегулювання.
2.3 Розробка алгоритмів визначення стійкості та якості перехідних процесів слідку вальної системи
Алгоритм – система правил виконання обчислювального процесу, що обов'язково приводить до розв'язання певного класу задач після скінченого числа операцій.
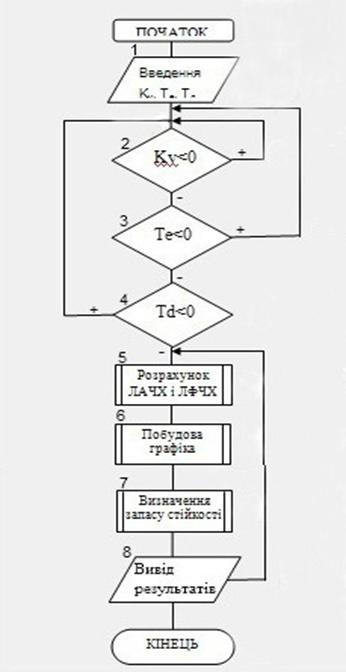
Рисунок 2.4 - Алгоритм роботи програми
На основі математичного опису перехідних процесів в промислових верстатах розроблено алгоритм для дослідження перехідних процесів.
1 – блок введення даних;
2 – перевіряється значення коефіцієнта підсилення;
3 – перевіряється значення постійної часу електромашинного підсилювача;
4 – перевіряється значення постійної часу ДПС;
5 – виконується розрахунок ЛАЧХ і ЛФЧХ;
6 – вивід на графік отриманих результатів ;
7 – визначення запасу стійкості;
8 – вивід результату;
Висновки до другого розділу
Даний розділ присвячений розробці формалізованої моделі систем проектування слідкувальних систем , структурної схеми системи управління слідкувадьними системами. За даною моделлю було розраховано передаточне рівняння для дослідження стійкості та якості управління перехідними процесами в слідкувальних системах.
3. ПРОГРАМНЕ ЗАБЕЗПЕЧЕННЯ МОДЕЛІ ДОСЛІДЖЕННЯ СТІЙКОСТІ ТА ЯКОСТІ ПЕРЕХІДНИХ ПРОЦЕСІВ СЛІДКУВАЛЬНОЇ СИСТЕМИ
3.1 Програмний комплекс
За завданням курсового проекту по дослідженню стійкості та якості слідкувальної системи була розроблена програма на мові високого рівня С++ в програмному середовищі C++ Builder 6.
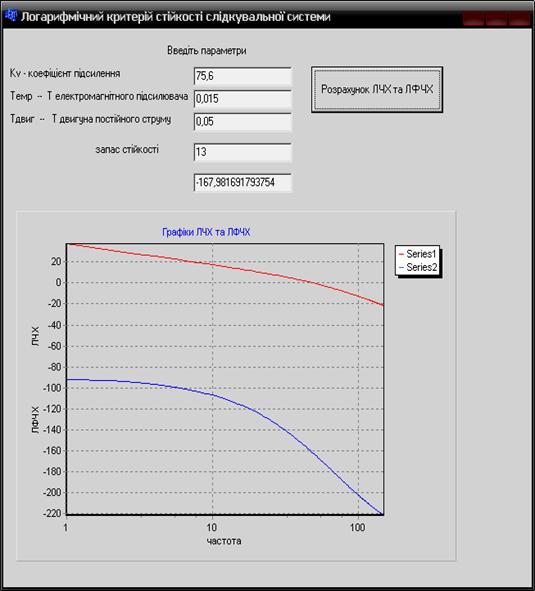
Рисунок 3.1 – Зображення ЛАЧХ і ЛФЧХ
3.2 Перевірка роботи моделі дослідження стійкості та якості перехідних процесів слідкувальної системи в пакеті інженерних розранках Matlab в додатку Simulink і Control System Toolbox
Після отримання результатів на розробленому програмному забезпеченні необхідно зробити перевірку на їх точність, тому далі за допомогою програмного пакету Маtlab було складено схему моделі та проведено дослід (Рисунок.3.2).
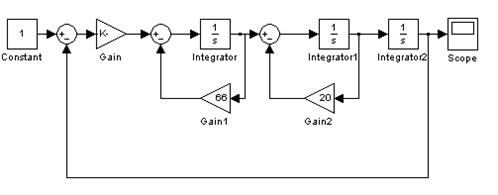
Рисунок 3.2 - Електронна модель слідкувальної системи
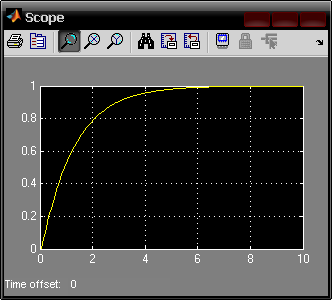
Рисунок 3.3 – Зображення перехідного процесу при одиничній вхідній дії
За допомогою даного графіка можна сказати, що дана система немає часу пере регулювання.
За допомогою Control System Toolbox ми також можемо отримати ЛАХ та ЛФЧХ. Для цього в командному рядку прописуємо наступні команди:
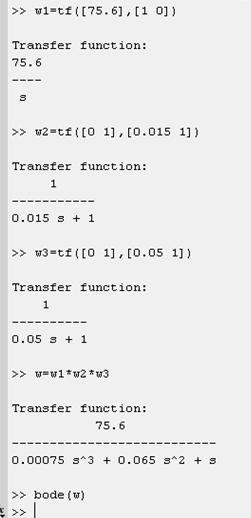
Та отримуємо наступний графік, який приведений на Рисунку 3.4
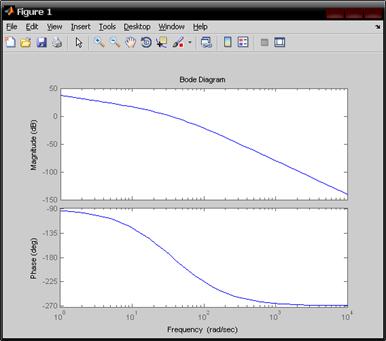
Рисунок 3.4 – Зображення графіка ЛАЧХ і ЛФЧХ
За його допомого можна підтвердити результати раніше проведеного дослідження про те, що система стійка.
Висновок до третього розділу
Після побудови структури слідкувальної системи отримані результати, було підтверджено дослідом в програмному середовищі Маtlab а також використано Control System Toolbox і середовище візуального програмування C++ Builder.
Висновки
В курсовій роботі розроблено алгоритм та програму дослідження стійкості та якості перехідних процесів слідкувальної з використання логарифмічного критерію. Обґрунтовано актуальність та необхідність розробки та проведено дослідження якості перехідних процесів та стійкості слідкувальної системи.
Дано характеристику слідкувальної системи, обґрунтовано вимоги до якості і точності управління. Розроблено функціональну, структурну схеми, математичну модель, розраховано параметри системи. На основі цих даних розроблено алгоритм та написано програму для побудови ЛАХ та ЛФЧХ на мові програмування високого рівня C++ в середовищі C++ Builder 6. Виконано дослідження якості перехідних процесів при одиничній вхідній дії і стійкості.
Дослідження показало, що розроблена система ССП, є стійкою. Має достатньо хорошу якість та стійкість управління.
При розробці системи автоматичного управління основною метою було зробити її не тільки працездатною (стійкою), але й такою, щоб виконувала свої функції з високою якістю. При розробці ССП максимально реалізовані можливості системи з метою отримання максимального ефекту від її використання.
СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ
1. Згуровський М.З. Основи системного аналізу [текст]/М.З. Згуровський, Панкратова Н.Д. – К.: Видавнича група BHV, 2007.–544с.
2. Іщенко В.І. Теорія автоматичного управління. Частина 2. Аналіз та синтез систем автоматичного управління [текст]/В.І.Іщенко; Житомирський військовий інститут радіоелектроніки – Ж.: ЖВІРЕ, 2002. – 296 с.
3. Іщенко В.І. Теорія автоматичного управління. Частина 1. Елементи та системи автоматичного управління [текст]/ В.І. Іщенко; Житомирський військовий інститут радіоелектроніки – Ж.: ЖВІРЕ, 2006. – 208 с.
4. Іщенко В.І. Теорія автоматичного управління: Довідник. [текст]/В.І.Іщенко, Зімчук І.В.; Житомирський військовий інститут радіоелектроніки – Ж.: ЖВІРЕ, 2004. – 96с.
5. В.І. Іщенко. Курсове проектування| та розробка| кваліфікаційних робіт [текст]/В.І. Іщенко/В.І. Іщенко С.В. Ковбасюк, С.В. Водоп’ян. – Житомир: ЖВІРЕ, 2000. – 72 с.
6. Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза систем[текст]/Е.А. Никулин. – СПб.: БХВ – Петербург, 2004. – 640 с.
7. Страшинин Е.Э. Основы теории автоматического управления. Часть 1. Линейные непрерывные системы управления [текст]/E.Э. Страшинин. – Екатеринбург: УГТУ – УПИ, 2000. 214с.
8. Сугоняк І.І. Методичні вказівки щодо виконання та оформлення курсових робіт з дисципліни «теорія систем та системний аналіз» для студентів, які навчаються за напрямом: «Системна інженерія» [текст]/ І.І. Сугоняк, Молодецька К.В.; Житомирський військовий інститут національного авіаційного університету – Ж.: ЖВІНАУ, 2009. – 44 с.
9. Теоретические основы системного анализа [текст]/ В.И. Новосельцев, Тарасов Б.В., Голиков В.К., Бемин Б.Е ; ред. В.И. Новосельцев; – М.: МАЙОР, 2006. – 592 с.
10. Іщенко В. І. Теорія вибору і ухвалення |прийняття, приймання| рішень |розв'язань, вирішень, розв'язувань|: Навчальний посібник. [текст]/В.І. Іщенко, Бобунов А. І.; М.: Наука. Головна редакція фізико – математичної літератури, 1982.–28с.
11. Востриков А.С. Теория автоматического регулирования [текст]/А. С. Востриков, Французова Г.А. М.: Высшая школа, 2004.– 365 с.
12. Шароватов В.Т. Обеспечение стабильности показателей качества автоматических систем [текст]/В.Т.Шароватов. – Л.:Энергоиздат, 1987.–176 с
13. Кустовська О. В. Методологія системного підходу та наукових досліджень[текст]/О. В. Кустовська; – Т: Економічна думка, 2005.– 124 с.
14. Юревич Е.И. Теория автоматического управления [текст]/Е.И.Юревич. – СПб.: БХВ – Петербург, 2007. 560 с.
15. Е.И. Юркевич. Основы робототехники: Учебник для вузов.[текст]/Е.И. Юркевич. – Л.:Машиностроение, Ленингр. отдиление, 2003. – 346 с.
16. Маклов С.В. Создание информационных систем с AllFusion Modeling Suite[текст]/С.В. Маклов; – М.: Диалог–Мифи, 2003. – 432 с.
17. Т.А. Павловская. Програмирование на языке высокого уровня. Учебник для вузов / Павловская Т.А. СПб.: Питер, 2007. – 432с.
18. А.А. Павлов. Основы системного аназиза и проектирования АСУ: Уебное пособие [текст]/А.А. Павлов, С.Н. Гриша, В.Н. Томашевський и др. – К. Выща школа; 1991 – 367с.
19. М. Месарович. Теория иерархических многоуровневых систем: /М. Месарович /М. Месарович, Д. Мако, И.Такахара – М. Мир, 1973 – 173с.
20. Ю. П. Сурмин. Теория систем и системный анализ: учеб. пособие. / Ю. П. Сурмин К.:МАУП, 2003. — 368 с.
21. О.М. Горбань. Oснови теорії систем і системного аналізу: Навчальний посібник./ Горбань О.М., Бахрушин В.Є. Запоріжжя: ГУ “ЗІДМУ”, 2004. – 204 с.
22. В.Н. Спицнадель. Основы системного анализа: Учеб. пособие. / Спицнадель В. Н. СПб.: «Изд. дом «Бизнесс – пресса», 2000 г. — 326 с.
23. А.В. Постолит Visual Studio .NET: разработка приложений баз данных. / Постолит А. В. СПб.: БХВ – Петербург, 2003. — 544 с.
24. Т. Коннолли. Базы данных. Проектирование, реализация и сопровождение. Теория и практика. 3 – е издание. /Т. Коннолли, К. Бегг : Пер. с англ. — М. : Издательский дом "Вильяме", 2003. — 1440 с.
25. Бесекерский В.А. Теория систем автоматического регулирования [текст]/В.А. Бесекерский, Попов Е.П. –М.: Наука, 1982. –304 с.: ил.
ДОДАТОК
Лістинг програми
void __fastcall TForm1::Button1Click(TObject *Sender)
{
double kv,td,tk,te;
try
{
kv = Edit1->Text.ToDouble();
if (kv<0)
{
throw Exception("Неверный формат данных");
}
}
catch(...)
{ MessageBox(Form1->Handle, "Неверный формат данных. Проверте данные.","Ошибка данных",
MB_ICONWARNING);
return;
}
//------------------------
try
{
td = Edit2->Text.ToDouble();
if (td<0)
{
throw Exception("Неверный формат данных");
}
}
catch(...)
{ MessageBox(Form1->Handle, "Неверный формат данных. Проверте данные.","Ошибка данных",
MB_ICONWARNING);
return;
}
//--------------------
try
{
tk = Edit2->Text.ToDouble();
if (tk<0)
{
throw Exception("Неверный формат данных");
}
}
catch(...)
{ MessageBox(Form1->Handle, "Неверный формат данных. Проверте данные.","Ошибка данных",
MB_ICONWARNING);
return;
}
//---------------------
try
{
te = Edit2->Text.ToDouble();
if (te<0)
{
throw Exception("Неверный формат данных");
}
}
catch(...)
{ MessageBox(Form1->Handle, "Неверный формат данных. Проверте данные.","Ошибка данных",
MB_ICONWARNING);
return;
}
//------------------
Series1->Clear();
Series2->Clear();
double v, f, fg,pr;
for (int i=1; i<150; i++)
{
v=20*log10(kv/i)-20*log10(sqrt(1+td*td*i*i))-20*log10(sqrt(1+te*te*i*i));
if (v>-2)
{ if(v<2)
{
pr=180-abs(fg);
if (pr>10)
{ Form1->Edit3->Text="Система не стійка";
}
if (pr<10)
{
Form1->Edit3->Text="Система не стійка";
}
if (pr>=10)
{
if (pr<=30)
{
Form1->Edit3->Text=pr;
}
}
Form1->Edit5->Text=fg;
}
}
f=-(3.14/2)-atan(i*td)-atan(i*te);
fg=57.3*f;
Series1->AddXY(i,v,"",clRed);
Series2->AddXY(i,fg,"",clBlue);
}
}
0 комментариев