Навигация
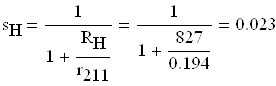
Относительное значение сопротивления фазы обмотки ротора
21773
знака
1
таблица
11
изображений
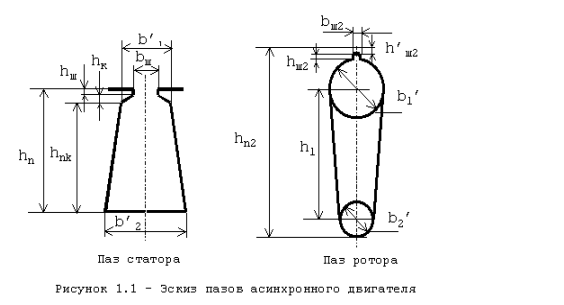
6.11 Относительное значение сопротивления фазы обмотки ротора.
![]() (6.12)
(6.12)
6.12 Индуктивное сопротивление фаз обмотки ротора:
![]() , (6.13)
, (6.13)
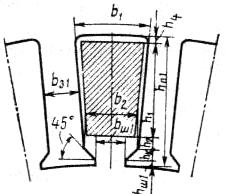
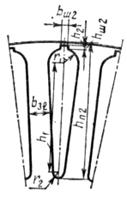
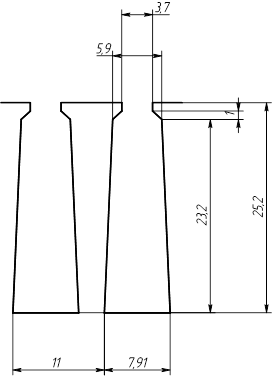
где lп – коэффициент магнитной проводимости пазового ротора.
Исходя из рисунка 9.50, e lп определим по формуле из [1] таблицы 9.26:
 , (6.14)
, (6.14)
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() , (6.15)
, (6.15)
![]()
Коэффициент магнитной проводимости лобового рассеяния:
![]() (6.16)
(6.16)
Коэффициент магнитной проводимости дифференциального рассеяния, определим по формуле:
 , (6.17)
, (6.17)
где  ,
,
где ![]() определяется графически, при
определяется графически, при ![]() ,
, ![]() [1] рисунок 9.51, д,
[1] рисунок 9.51, д, ![]() .
.
![]()
По формуле (6.13) рассчитаем индуктивное сопротивление обмотки статора:
![]()
6.13 Определим относительное значение индуктивного сопротивления обмотки статора ![]() :
:
![]() (6.18)
(6.18)
6.14 Произведём расчёт индуктивного сопротивления фазы обмотки ротора по формуле:
![]() , (6.19)
, (6.19)
где lп2 – коэффициент магнитной проводимости паза ротора;
lл2 – коэффициент магнитной проводимости лобовой части ротора;
lд2 – коэффициент магнитной проводимости дифференциального рассеяния ротора.
Коэффициент магнитной проводимости паза ротора рассчитаем по формуле, исходя из [1] таблица 9.27:
 , (6.20)
, (6.20)
где ![]() ,
, ![]() .
.
![]() , (6.21)
, (6.21)

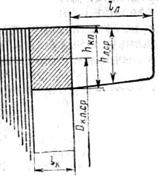
6.15 Коэффициент магнитной проводимости лобовой части ротора определим по формуле:
 ,
,
 (6.22)
(6.22)
6.16 Коэффициент магнитной проводимости дифференциального рассеяния ротора определим по формуле:
 , (6.23)
, (6.23)
где  .
.
![]()
6.17 Найдём значение индуктивного сопротивления по формуле (6.19):
![]()
Приведём x2 к числу витков статора:
![]() (6.24)
(6.24)
Относительное значение, ![]() :
:
![]() (6.25)
(6.25)
7.1 Рассчитаем основные потери в стали статора асинхронной машины по формуле:
 , (7.1)
, (7.1)
где ![]() – удельные потери,
– удельные потери, ![]() [1] таблица 9.28;
[1] таблица 9.28;
b – показатель степени, для марки стали 2013 ![]() ;
;
kда и kдz – коэффициенты, учитывающие влияние на потери в стали, для стали марки 2013 ![]() ,
, ![]() ;
;
ma – масса ярма, считается по формуле:
![]() ,
,
![]() , (7.2)
, (7.2)
где ![]() – удельная масса стали.
– удельная масса стали.
Масса зубцов статора:
![]() , (7.3)
, (7.3)
![]()
7.2 Рассчитаем полные поверхностные потери в роторе:
![]() , (7.4)
, (7.4)
где pпов2 – удельные поверхностные потери, определим по формуле:
 , (7.5)
, (7.5)
где ![]() – коэффициент, учитывающий влияние обработки поверхности головок зубцов ротора на удельные потери;
– коэффициент, учитывающий влияние обработки поверхности головок зубцов ротора на удельные потери;
В02 – амплитуда пульсации индукции в воздушном зазоре, определим по формуле:
![]() , (7.6)
, (7.6)
где ![]() определяется графически при
определяется графически при ![]() [1] рисунок 9.53, б.
[1] рисунок 9.53, б.
7.3 Рассчитаем удельные поверхностные потери по формуле (7.5):
![]() ,
,
![]()
7.4 Рассчитаем пульсационные потери в зубцах ротора:
 , (7.7)
, (7.7)
где mz2 – масса стали зубцов ротора;
Впул2 – амплитуда магнитной пульсации в роторе.
![]() , (7.8)
, (7.8)
![]() , (7.9)
, (7.9)
![]()
7.5 Определим сумму добавочных потерь в стали:
![]() (7.10)
(7.10)
7.6 Полные потери в стали:
![]() (7.11)
(7.11)
7.7 Определим механические потери:
![]() , (7.12)
, (7.12)
где ![]() , при
, при ![]() по таблице 9.29 [1].
по таблице 9.29 [1].
7.8 Рассчитаем добавочные потери при номинальном режиме:
![]() (7.13)
(7.13)
7.9 Ток холостого хода двигателя:
![]() , (7.14)
, (7.14)
где Iх.х.а. – активная составляющая тока холостого хода, её определим по формуле:
![]() , (7.15)
, (7.15)
где Рэ.1 х.х. – электрические потери в статоре при холостом ходе:
![]() , (7.16)
, (7.16)
![]()
7.10 Определим коэффициент мощности при холостом ходе:
![]() (7.17)
(7.17)
8. Расчёт рабочих характеристик
8.1 Определим действительную часть сопротивления:
![]() (8.1)
(8.1)
8.2 Мнимая часть сопротивления:
![]() (8.2)
(8.2)
8.3 Постоянная электродвигателя:
![]() , (8.3)
, (8.3)
 (8.4)
(8.4)
8.4 Определим активную составляющую тока:
![]() (8.5)
(8.5)
8.5 Определим величины:
![]() ,
,
![]() , (8.6)
, (8.6)
![]() , (8.7)
, (8.7)
![]() (8.8)
(8.8)
8.6 Потери, не меняющиеся при изменении скольжения:
![]() (8.9)
(8.9)
Принимаем ![]() и рассчитаем рабочие характеристики, при скольжении равном: 0,005; 0,01; 0,015; 0,02; 0,0201. Результаты расчёта запишем в таблицу 8.1.
и рассчитаем рабочие характеристики, при скольжении равном: 0,005; 0,01; 0,015; 0,02; 0,0201. Результаты расчёта запишем в таблицу 8.1.
Р2н=110кВт; U1н=220/380 В; 2p=10 I0a=2,74 A; I0p=Im=61,99 A;
Pcт + Pмех=1985,25 Вт; r1=0,0256 Oм; r¢2=0,0205 Oм; с1=1,039;
а¢=1,0795; а=0,0266 Ом; b¢=0; b=0,26 Ом
Таблица 8.1
Рабочие характеристики асинхронного двигателя
| Расчётная формула | С. И. | Скольжение s | ||||
| 0,005 | 0,01 | 0,015 | 0,02 | 0,0201 | ||
|
| Ом | 4,43 | 2,21 | 1,48 | 1,11 | 1,1 |
|
| Ом | 0 | 0 | 0 | 0 | 0 |
|
| Ом | 4,46 | 2,24 | 1,51 | 1,14 | 1,13 |
|
| Ом | 0,26 | 0,26 | 0,26 | 0,26 | 0,26 |
|
| Ом | 4,47 | 2,26 | 1,53 | 1,17 | 1,16 |
|
| А | 49,22 | 97,35 | 143,79 | 188,03 | 189,66 |
|
| - | 0,998 | 0,991 | 0,987 | 0,974 | 0,974 |
|
| - | 0,058 | 0,115 | 0,169 | 0,222 | 0,224 |
|
| А | 51,86 | 99,21 | 144,66 | 185,88 | 187,47 |
|
| А | 64,84 | 73,19 | 86,29 | 103,73 | 104,47 |
|
| А | 83,03 | 123,29 | 168,44 | 212,86 | 214,61 |
|
| А | 51,14 | 101,15 | 149,4 | 195,36 | 197,06 |
|
| кВт | 34,23 | 65,48 | 95,48 | 122,68 | 123,73 |
|
| кВт | 0,529 | 1,167 | 2,179 | 3,479 | 3,537 |
|
| кВт | 0,161 | 0,629 | 1,372 | 2,347 | 2,388 |
|
| кВт | 0,171 | 0,327 | 0,477 | 0,613 | 0,619 |
|
| кВт | 2,846 | 4,106 | 6,011 | 8,421 | 8,527 |
|
| кВт | 31,38 | 61,37 | 89,47 | 114,26 | 115,2 |
|
| - | 0,917 | 0,937 | 0,937 | 0,931 | 0,931 |
|
| - | 0,625 | 0,805 | 0,859 | 0,873 | 0,874 |

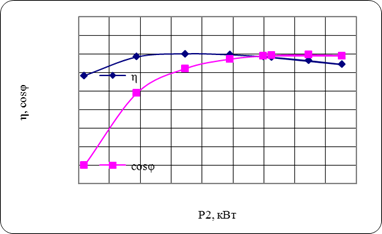
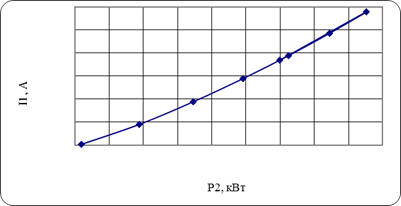
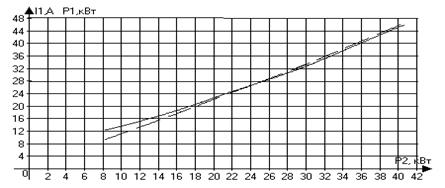
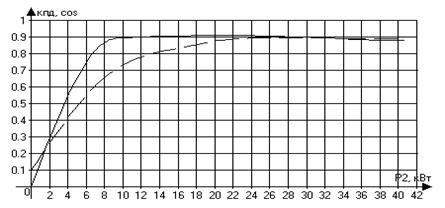
Рисунок 8.1. График зависимости ![]() двигателя от мощности P2
двигателя от мощности P2
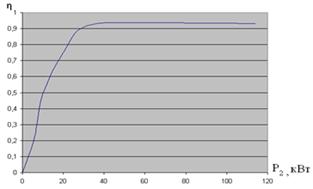
Рисунок 8.2. График зависимости КПД двигателя от мощности P2
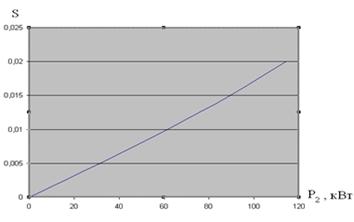
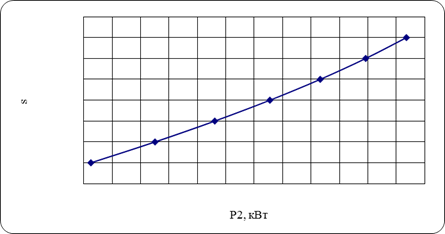
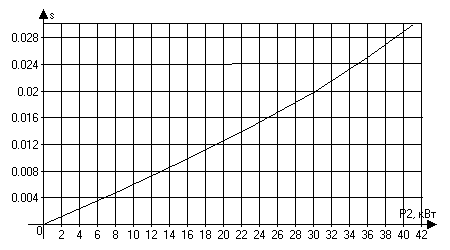
Рисунок 8.3. График зависимости скольжения s двигателя от мощности P2

Рисунок 8.4. График зависимости тока статора I1 двигателя от мощности P2
Похожие работы
... на вале ротора, далее, посредством щеточного контакта, к обмотке ротора можно подключить пусковой реостат. В данном курсовом проекте речь пойдет о трехфазном асинхронном двигателе с короткозамкнутым ротором. 1. АНАЛИТИЧЕСКИЙ ОБЗОР 1.1 Современные серии электрических машин В 70-е годы была разработана и внедрена серия электродвигателей 4А, основным критерием при проектировании которой ...
... 218) (219) (220) (221) Пусковые параметры: (222) (223) (224) (225) (226) (227) (228) Результаты расчёта токов в пусковом режиме асинхронного двигателя с КЗ ротором учетом влияния эффекта вытеснения тока представлены в таблице 3.5.3 и 3.5.4. Таблица 3.5.3 – Расчет пусковых характеристик асинхронного двигателя с КЗ ротором учетом эффекта вытеснения тока и насыщения от ...

... 2,54 2,45 2,59 Графики пусковых характеристик спроектированного двигателя с короткозамкнутым ротором изображены на рисунке 6 и рисунке 7. Рисунок 6 – Зависимость Рисунок 7 – Зависимость Спроектированный асинхронный двигатель удовлетворяет требованиям ГОСТ как по энергетическим показателям (КПД и ), так и по пусковым характеристикам. 9. ТЕПЛОВОЙ РАСЧЁТ Превышение температуры ...
... Потери, не изменяющиеся при изменении скольжения : Pст. + Pмех. = 727,12+125,6 = 852,17 Вт. Таблица 1. Рабочие характеристики асинхронного двигателя. Параметр Ед-ца Скольжение 0,005 0,01 0,015 sн=0,019 0,02 0,025 0,03 a’×r’2/s Ом 48,53 24,27 16,18 12,77 12,13 9,71 8,09 b’×r’2/s Ом 0 0 0 0 0 0 0 R = a + a¢*r¢2/s Ом 49,04 ...
0 комментариев