Постановка и декомпозиция общей задачи управления технологическим процессом
Защитные функции и блокировки
Выбор принципиальных технических решений
Математическое описание объекта регулирования
Выбор и расчет регулятора
Исследование устойчивости системы автоматического регулирования
Измерение температуры
Навигация
Математическое описание объекта регулирования
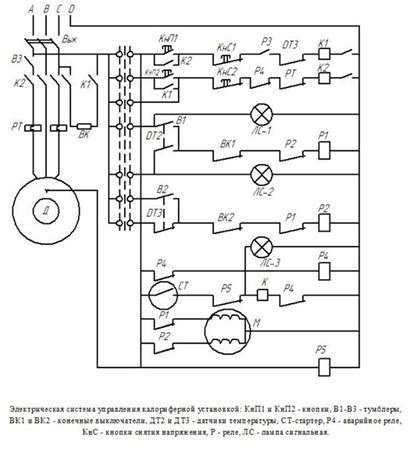
Автоматическая система управления приточно-вытяжной вентиляции
48556
знаков
3
таблицы
7
изображений
6. Математическое описание объекта регулирования
При создании и внедрении САР вентиляции и кондиционирования воздуха необходимо знать характеристики, как определенных элементов СКВ, так и системы в целом, которые описывают их поведение в переходных и установившихся режимах. Только по таким характеристикам можно оптимально выбрать регулятор, датчики, исполнительные механизмы, построить САР и произвести ее наладку.
Наиболее широко используются методы математического описания САР на основе передаточных функций W(p), которые отражают взаимосвязь входных и выходных параметров отдельных элементов и всей системы [1].
Обобщенную структурную схему САР можно представить в виде, показанном на рисунке 3:
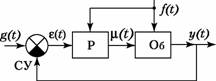
Рисунок 3 – Обобщенная структурная схема САР
Датчики параметров воздуха и тепловлагоносителей можно рассматривать как апериодическое звено первого порядка. Их инерционность (постоянная времени) зависит от конструкции и массы чувствительного элемента. Еще в более сильной степени инерционность зависит от скорости воздуха. При неподвижном воздухе постоянная времени датчиков достигает десятков минут и для помещений может оказаться самой большой постоянной среди звеньев объекта. Поэтому с целью снижения инерционности применяют локальное повышение скорости воздуха вблизи датчика, установку датчиков в приточном или рециркуляционном воздухопроводах и другие приемы.
Регуляторы расхода (клапаны) изменяют расход воздуха Gв или воды Gw при повороте створок на угол α или перемещении плунжера h. При мгновенном изменении α или h расход воздуха или воды также меняется мгновенно. Поэтому клапаны являются обычными усилительными звеньями, в которых входная и выходная величины связаны коэффициентом передачи. Для воздушного клапана ![]() , где
, где ![]() – сечение клапана. Для водяного клапана при данном диаметре клапана и типе плунжера
– сечение клапана. Для водяного клапана при данном диаметре клапана и типе плунжера ![]() . Функции
. Функции ![]() и
и ![]() обычно нелинейны, и коэффициенты передачи при разных положениях α или h могут меняться значительно, если клапаны поставлены без расчета.
обычно нелинейны, и коэффициенты передачи при разных положениях α или h могут меняться значительно, если клапаны поставлены без расчета.
Основным элементом CКВ является обслуживаемое помещение (ОП), в котором постоянно совершается переход воздуха из одного состояния в другое. Для поддержания заданных параметров в обслуживаемое помещение подается приточный воздух с параметрами, отличными от параметров внутри помещения. Перемешиваясь с внутренним воздухом и вытесняя его, приточный воздух ассимилирует избыточное тепло и влагу или подогревает и увлажняет воздух помещения.
Обслуживаемое помещение характеризуется рассредоточенными показателями воздуха. Учет рассредоточенных характеристик затруднен, поэтому помещение при решении задач автоматического регулирования рассматривается как объект с сосредоточенными параметрами, т. е. температура и влажность воздуха определяются в наиболее типичной (рабочей) зоне. Именно в такой зоне должны быть установлены датчики регулируемых параметров.
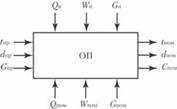
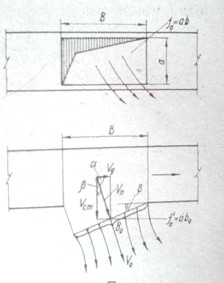
Рисунок 4 – Обобщенная функциональная модель обслуживаемого помещения как объекта регулирования
На функциональной схеме обслуживаемого помещения (рисунок 4) выделены внешние возмущающие воздействия (тепловая Qн, влажностная Wн и аэродинамическая Gн нагрузки) и внутренние (тепловая Qпом, влажностная Wпом и газовая Спом нагрузки). Входными параметрами являются: температура tпр, влажность dпр и расход подаваемого в помещение воздуха Gпр, и соответственно регулируемыми: tпом, dпом и Спом. В системах комфортного кондиционирования для стабилизации заданного состояния воздуха, т. е. двух независимых переменных tпом и dпом можно использовать, в общем случае, три управляющие воздействия: tпр, dпр и Gпр. Особенности применения каждого определяются исходными условиями, ограничениями, накладываемыми на систему, а также экономическими соображениями.
Обычно в кондиционируемых помещениях переменна тепловая нагрузка, влажностная – относительно постоянна, а газовая – требует некоторого минимального расхода наружного воздуха.
Для такого объекта возможны три вида систем стабилизации температуры: с постоянным или переменным расходом воздуха и смешанные.
Управление температурой помещения с помощью изменения расходов приточного и удаляемого воздуха (количественное регулирование), несмотря на преимущества, связанные с экономией теплоты, воды и электроэнергии, уменьшении мгновенных и годовых расходов, реализуется редко. Это связано с относительно высокими капитальными затратами и сложностью управления, особенно многозональных систем. Поэтому, наиболее распространенными являются системы стабилизации температуры в помещении по каналу изменения температуры приточного воздуха (качественное управление). Такие системы наиболее полно исследованы как объекты автоматизации: выведены аналитически и экспериментально подтверждены передаточные функции, значения коэффициентов передач и постоянных времени.
Динамические свойства помещения зависят от кратности воздухообмена Кв, обобщенного размера помещения lV (отношение объема помещения Vпом к площади поверхности ограждений F), коэффициентов теплопередачи ограждений Когр и постоянной времени ограждения Тогр. Аналитически передаточная функция по каналу температуры приточного воздуха получена в виде
![]() , (1)
, (1)
где Kпом и Тогр могут быть определены по показателям Кв, lV, Когр,
теплопроводности св и плотности ρв воздуха [2];
Тпом – постоянная времени помещения – может быть определена как
Тпом ≈Кв-1.
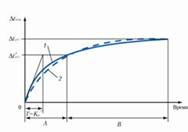
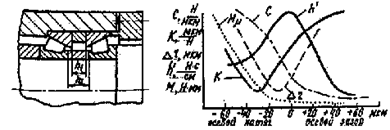
1 – эксперимент; 2 – расчет
Рисунок 5 – Процесс изменения температуры в помещении
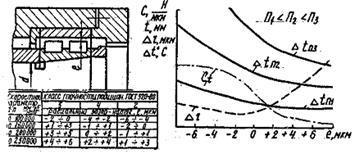
Анализ кривых переходного процесса, построенных на основании приведенной передаточной функции и экспериментальных данных, показывает, что процесс изменения температуры в помещении имеет два явно выраженных участка (рисунок 5). На первом (А) – процесс изменения температуры происходит быстро, скорость изменения температуры при этом зависит от кратности воздухообмена Кв. По литературным данным этот отрезок времени составляет (3–4)Кв-1. По мере поглощения теплоты ограждением и оборудованием скорость изменения температуры воздуха замедляется (участок В), проявляется инерционность ограждений (Тогр может составлять порядка десятка часов). Поэтому, теоретический конец переходного процесса достигается через несколько суток.
Учитывая, что для помещений характерны периоды изменения составляющих тепловой нагрузки от нескольких минут до часов, в задачах с такими периодами колебаний можно пренебречь инерционностью ограждений и представить помещение апериодическим звеном первого порядка с передаточной функцией
![]() . (2)
. (2)
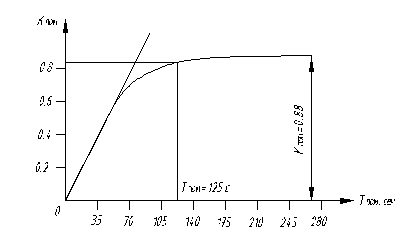
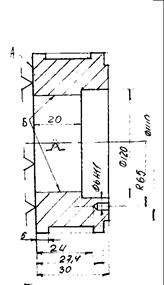
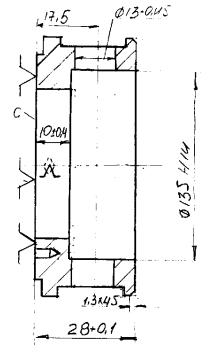
Рисунок 6
По экспериментальной кривой разгона (рисунок 6) определяем параметры объекта регулирования: коэффициент теплопередачи помещения Кпом=0,88 и постоянной времени помещения Тпом=125 секунд. Запишем передаточную функцию, подставив в формулу 2 численные значения:
![]() (3)
(3)
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...

... помещении, а так же выбрать марку вентиляторов и их количество для обеспечения микроклимата. Расчет системы вентиляции В создании оптимального микроклимата наиболее важную роль играют вентиляция и отопление помещений. При проектировании систем вентиляции и отопления животноводческих помещений учитывают количество животных, их возраст, продуктивность, выделение ими тепла, водяных паров и ...

... Федерации и г.Москвы в области охраны окружающей среды. Влияние проектируемого объекта на окружающую природную среду допустимо. Реализация проекта возможна. III. Управление и эксплуатация торгового центра 3.1 Ход реализации проекта Заказчик (Инвестор) выполнил следующие инвестиционные исследования: · Формирование инвестиционного замысла; · Его предварительное согласование; · ...
... ) по стоимости, надежности и другим характеристикам занимают промежуточное положение между этими группами. ОСНОВНАЯ ЧАСТЬ 1 Структурная схема Структурная схема данной системы управления кондиционером представлена на Рисунке 6. Рисунок 6 – Структурная схема 2 Выбор элементной базы 2.1 Пульт управления Пульт управления кондиционером содержит два ЖКИ индикатора текущей ...
0 комментариев