Навигация
Фазовий напівкутовий дискримінатор
16189
знаков
1
таблица
10
изображений
3. Фазовий напівкутовий дискримінатор
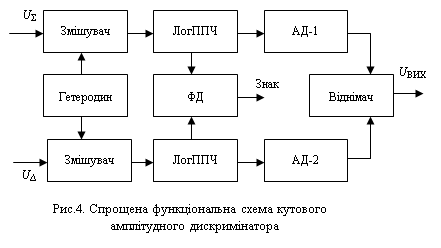
Як уже наводилося вище, основним недоліком фазового кутового дискримінатора, функціональна схема якого наведена на рис. 4, є мала межа однозначного визначення кутового положення цілі. Однозначність зберігається в межах, коли кут 2a між векторами r+ і r – лежить у діапазоні ±90°, тобто коли кут a лежить у межах ±45°.
Робочий сектор, однозначно визначений коригувальною поправкою Djц, в цьому випадку визначатиметься областю, де співвідношення прийнятих сигналів D/У лежить у межах від нуля до одиниці, тобто до точок перетинання сумарної і різницевої ДН антени.
Для усунення цього недоліку використовують метод, суть якого полягає в тому, що сигнали r+ і r – порівнюються за фазою не між собою, а із сигналом сумарної ДН å у двох окремих ФД. Пелeнгаційна характеристика в цьому випадку утвориться додаванням результатів окремого порівняння сигналів, фазовий кут між якими дорівнює не 2a, а a. Для кожного з ФД рівняння (3) прийме вигляд
![]() ,
,
із чого витікає, що відношення сигналів D і å для однозначного визначення значення U лежатиме в межах від нуля до нескінченості. Робочий сектор пеленгаційної характеристики значно збільшується, а його межі фактично визначатимуться шириною ДН сумарного променя антени.
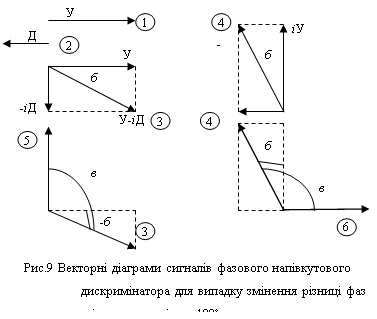
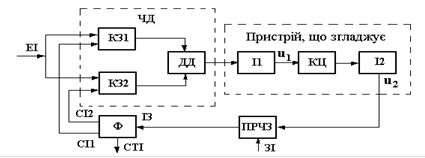
Кутовий дискримінатор, в основу роботи якого покладений цей принцип, одержав назву сумарно-різницевого напівкутового фазового дискримінатора або, просто, напівкутового фазового дискримінатора. На рис. 8 показана спрощена функціональна схема такого дискримінатора, а на рис. 9 і 10 наведені векторні діаграми сигналів, що ілюструють принцип роботи цієї схеми.
На вхід схеми надходять сигнали сумарного і різницевого каналів амплітудного пеленгатора (точки 1 і 2 на функціональній схемі) і відповідні сигнали на векторних діаграмах. Перетворювач П, виконаний на пасивному елементі у вигляді кільцевого моста або хвилеводного трійника, утворює на своїх двох виходах сумарні сигнали +iД і Д+iУ із поворотом фази одного з вхідних сигналів У або Д на +90° (точки 3 і 4 на функціональній схемі). Сигнали У і Д попередньо фазовані для одного з напрямків відхилення цілі від положення осі антени (рис. 10).

Для випадку відхилення цілі від напрямку осі антени в протилежну сторону, різниця фаз цих сигналів, як очевидно з рис. 9, змінюється на 180˚ (рис. 9, вектори 1 і 2). Після перетворення високочастотних сигналів у проміжну частоту, їхнього підсилення і «м’якого» обмеження в логарифмічних підсилювачах проміжної частоти (ППЧ-ЛОГ) сигнали надходять до фазових детекторів ФД-1 і ФД – Опорною напругою для цих ФД служить сумарний сигнал У, який отримав перед тим такі самі перетворення, що і сигнали У+iД і Д+iУ, і сумарний сигнал iУ, зсунутий попередньо за фазою на +90°.
В схемі використані так називані «косинусні» ФД, у яких вихідна напруга визначається не синусною, а косинусною залежністю від фазового кута між векторами сигналів вхідної й опорної напруг. Ці детектори схемно відрізняються від «синусних» ФД тільки тим, що один із вхідних сигналів попередньо повернений за фазою на 90°.
Згідно з векторними діаграмами, наведеними на рис. 10,
![]() ;
;
![]() ;
;
![]() ;
;
![]() . (4)
. (4)
Для векторних діаграм, наведених на рис. 10, b=90°+a.
Отже, ![]() .
.
Тоді
![]() ;
;
![]() .
.
З цих виразів витікає, що знак пеленгаційної функції міститься у самій функції і вживати спеціальні заходи для визначення сторони відхилення цілі від напрямку осі антени, як це робилося в амплітудних ФД, немає потреби.
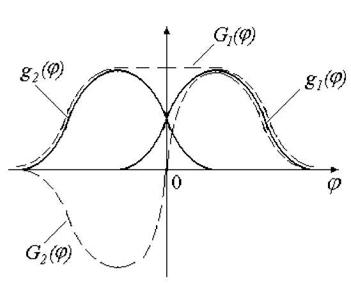
Якщо припустити, що сумарна і різницева ДН амплітудного пеленгатора визначаються виразами (4) і (5), то вираз пеленгаційної характеристики напівкутового фазового дискримінатора, що працює разом із сумарно-різницевим амплітудним пеленгатором, матиме вигляд
![]() .
.
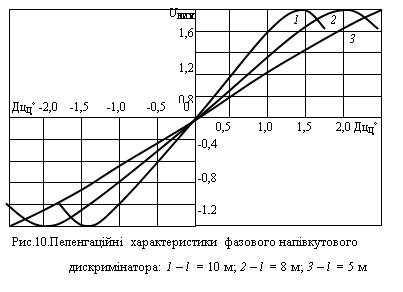
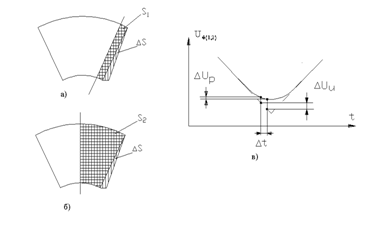
Графіки цієї функції наведені на рис. 10.
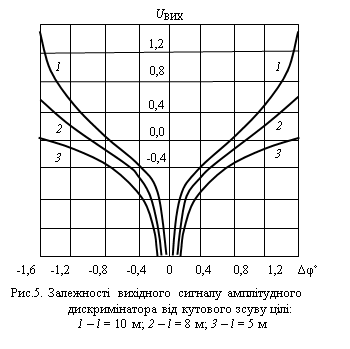
Графіки обраховані за умови, що довжина робочої хвилі бортових відповідачів дорівнює 27,5 см, а розкриви антенних ґраток у поземному напрямку дорівнюють відповідно 10; 8 і 5 м. Як очевидно з рисунку, на відміну від пеленгаційних характеристик кутового фазового дискримінатора (див. рис. 8) робочий сектор однозначного визначення відхилення цілі від напрямку осі антени в цьому випадку практично обмежується лише шириною ДН сумарного променя антени і припустимої зміни крутизни пеленгаційної характеристики.
Деяке ускладнення схеми напівкутового дискримінатора, пов’язане з необхідністю введення третього каналу для сумарного сигналу, двох ФД і додаткових перетворювачів фаз, не принципове. Основним недоліком аналізованої схеми, як і для кутового фазового дискримінатора, є необхідність стабілізації фазових співвідношень сигналів у всіх трьох каналах. Нестабільність фази може призвести до прямих помилок визначення азимутального положення цілі. Усувається цей недолік в сучасних моноімпульсних ВРЛ раціональністю рішень під час розробки і виготовлення апаратури приймачів, а також застосуванням контрольних відповідачів і спеціальних каліброваних пілот-сигналів, за якими провадиться постійна корекція фазових характеристик дискримінаторів.
На разі принцип напівкутового фазового визначення азимутального положення цілей використовується в радіолокаторах RSM 970 (Thomson-CSF, Thales, Франція), RSM 970S (Airsys ATM, Франція), IRS-20 MP/L (Indra-Іспанія), MSSR/Mode S (Northrop Grumman, США), S-470 Messenger (Marconi Radar Systems, Англія), CM SSR-401 (Cardion Electronics, США) і в деяких інших радіолокаторах.
Похожие работы
... ість різниці фаз Dy° між сумарним і різницевим сигналами у функції кута Dj°. За позитивних значень Dj° коригувальна добавка Djц° матиме негативний знак, а за негативних – позитивний. Таким чином, амплітудні кутові дискримінатори, призначені для визначення коригувальної добавки Djц, повинні містити пристрої, що реагують не лише на співвідношення амплітуд сигналів UD і Uå, але і на різницю фаз ...


... ; для виділення періодично повторюваних імпульсів на тлі перешкод у системах зв'язку з імпульсними піднесійними. Такі системи спостереження мають назву часових автоселекторів. Функціональна схема системи подана на рис. 4. Радіолокаційний приймач відкривається (стробується) за допомогою часового автоселектора на короткі інтервали часу очікуваного приходу ехосигналу від обраної цілі. Ця міра пі ...
... ією палива, підвищенням продуктивності автомобіля в цілому і окремих його вузлів; збільшенням його ресурсу й в остаточному підсумку підвищенням коефіцієнта готовності парку. Витрати на діагностику системи запалення включають капіталовкладення на придбання й установку діагностичного встаткування, вартість займаних їм виробничих площ і експлуатаційні витрати, пов'язані із проведенням діагностики ( ...
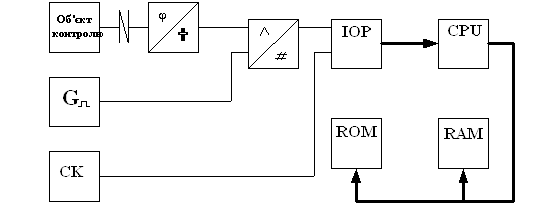
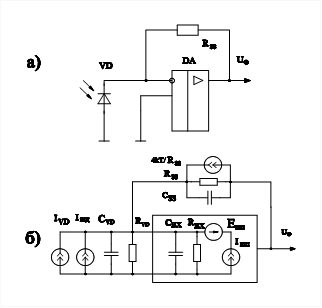
... дипломного проекту. Рисунок 3.1 – Схема електрична структурна пристрою контролю середнього значення кутової швидкості 4. Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом 4.1 Аналіз лінійного фотоприймача Фотоелектричні перетворювачі площа-напруга (ППН) використовуються у багатьох пристроях, таких як перетворювач ...
0 комментариев