Навигация
Оптимальний варіант структурної схеми
40982
знака
4
таблицы
12
изображений
2.2 Оптимальний варіант структурної схеми
На основі попередніх досліджень проведених вище. Ми зробили
висновок, що наша система буде розроблятися за такою схемою як зображена на рисунку 2.3. Система побудована за такою схемою матиме найкращі технічні характеристики та задовольнятиме технічним вимогам поставленим в завданні (рисунок 2.4).

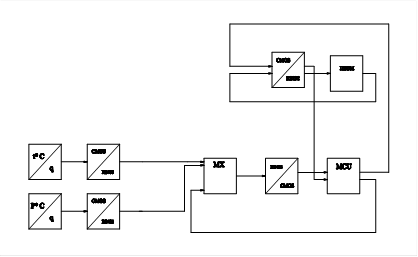
Рисунок 2.4 – Структурна схема системи для вимірювання температури
Отже, інформаційно – вимірювальна система вимірювання температури матиме вигляд :
Т/^ – датчик, призначений для вимірювання температури;
Мх – мультиплексор;
![]() – аналого-цифровий перетворювач - це функціональний пристрій, призначений для перетворення аналогової величини, в даному випадку постійної напруги в цифровий код;
– аналого-цифровий перетворювач - це функціональний пристрій, призначений для перетворення аналогової величини, в даному випадку постійної напруги в цифровий код;
MCU – мікроконтролер;
USART/RS485 – прилад який призначений для перетворення інтерфейсу з USART в RS485;
РС – персональний комп’ютер, або інша обчислювальна машина.
Розглянемо детальніше переваги і роботу системи для вимірювання температури. Обрана схема має ряд переваг над попередніми, головною перевагою даної реалізації схеми є простота в реалізації схеми, для розробки цієї схеми ми затратимо набагато менше конструкторських зусиль, але це призвело до того, що більшої уваги прийдеться затратити на написання програмного забезпечення і забере більше часу у програмістів для реалізації програмування мікроконтролера. Але, завдяки того, що дана схема має малу кількість комплектуючих деталей вона є більш завадостійкою, як наслідок отримання реального сигналу спрощується. Це в свою чергу призводить до того, що точність та надійність цієї системи збільшується. А також дана схема має набагато менше енергоспоживання ніж вище розглянуто.
Тепер розглянемо роботу системи для визначення температури. Після того як датчики для визначення температури підключені до живлення вони починають вимірювати температуру в середовищі, де вони безпосередньо знаходяться і під дією зовнішніх факторів починають формувати аналоговий сигнал. Після того, як з персонального комп'ютера буде поданий запит про стан того чи іншого датчика, мікроконтролер подає сигнал мультиплексору про підключення того чи іншого вимірювального каналу, далі аналоговий сигнал з будь-якого датчика подається на АЦП, де аналоговий сигнал перетворюється в цифровий код і потім подається на мікроконтролер. Далі мікроконтролер обробляє ці дані і через блок гальванічної розв'язки передає на перетворювач інтерфейсів інформацію формату інтерфейсу USART, перетворювач міняє формат даних в зручну для порту RS – 485, яким обладнаний комп’ютер, вже підготовлену кодову інформацію комп’ютер в свою чергу розшифровує її і подає в зручній для оператора формі або на пристрої контролю, які можуть керувати процесом і надалі при будь-яких критичних ситуаціях. Ще важливим блоком структурної схеми є блок гальванічної розв'язки, який виконує роль буфера між мікроконтролером та перетворювачем інтерфейсу, і призначений для захисту порту персонального комп'ютера від потужних завад, які можуть призвести до випалення порту ЕОМ. Завдяки цьому блоку значно підвищується завадостійкість надійність системи.
3. Розробка електричної принципової схеми системи вимірювання температури
3.1 Вибір мікроконтролера
На основі розробленої, структурної схеми системи вимірювання температури, виконана розробка електричної принципової схеми вимірювальної системи.
Для виконання поставленої задачі ми обираємо мікроконтролер типу MSP430F149, який здійснює основні функції управління, збору і передачі інформації, схема ввімкнення якого представлена на рисунку 3.2.
Мікроконтролер має: наявність процесора або арифметико-логічного пристрою, оперативної пам’яті, портів введення-виведення та інших периферійних засобів. Головним критерієм яким ми будемо керуватись є те, що для поставленої задачі нам потрібно вибрати такий мікроконтролер, який би мав невисоке енергозпоживання та в разі збою роботи головного сервера (комп’ютера) зміг би забезпечити роботу локальної вимірювльної системи.
Найбільшими виробниками мікроконтролерів в світі є Atmel Corporation, Texas Instruments&MAXIM, Analog Devices, Microchip. Менш потужними є Intel, Winbond, Scenix, Motorola. Компанія Texas Instruments розробила й серійно випускає сімейство мікроконтролерів MSP430, що задовольняє вимоги найвимогливішого розроблювача пристроїв на мікроконтролерах. Розглянемо модулі та периферійні пристрої мікроконтролера MSP430F149. Представимо узагальнений огляд кожного модуля й периферійного пристрою вибраного нами мікроконтролера.
Сімейство MSP430 має наступні ключові особливості:
Архітектура з наднизьким споживанням, що збільшує час роботи при
живленні від батарей:
- для збереження вмісту ОЗУ необхідний струм не більше 0,1 мкА;
- модуль тактування реального часу споживає 0,8 мкА;
- струм споживання при максимальній продуктивності становить 250 мкА;
Високоякісна аналогова периферія для виконання точних вимірів:
- убудовані модулі 12-розрядною або 10-розрядного АЦП швидкістю 200 ksps;
- є температурний датчик і джерело опорної напруги URef;
- здвоєний 12-розрядний ЦАП;
- таймери, керовані компаратором для виміру резистивних елементів;
- схема спостереження (супервізор) за напругою живлення;
16-розрядне RISC CPU, що допускає нові додатки до фрагментів коду:
- великий регістровий файл знімає проблему «вузького файлового горлечка»;
- компактне ядро має знижене енергоспоживання й вартість;
- оптимізоване для сучасного високорівневого програмування;
- набір команд складається з 27 інструкцій, підтримується сім режимів адресації;
- розширені можливості векторних переривань;
Можливість внутрішньо схемного програмування Flash-пам'яті дозволяє гнучко змінювати й обновляти програмний код, робити реєстрацію даних.
Допоміжна низькочастотна система тактування (ACLK) працює безпосередньо від звичайного 32 кГц годинного кристалу. Модуль ACLK може використатися як фонова система реального часу з функцією самостійного «пробудження». Інтегрований високошвидкісний осцилятор із цифровим керуванням (DCO) може бути джерелом основного тактування (MCLK) для ЦПУ й високошвидкісних периферійних пристроїв. Модуль
DCO стає активним і стабільним менш ніж через 6 мкс після запуску. Вирішення на основі архітектури MSP430 дозволяють ефективно використати високопродуктивне 16-розрядне CPU у дуже малі проміжки часу: низькочастотна допоміжна система тактування забезпечує роботу мікроконтролера в режимі ультранизького споживання потужності; активізація основного високошвидкісного модуля тактування дозволяє виконати швидку обробку сигналів.
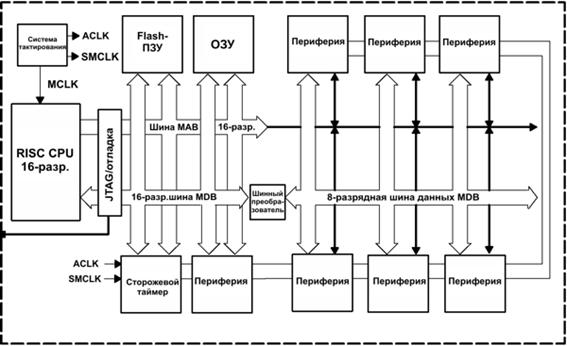
Рисунок 3.1- Архітектура MSP430
Периферійні модулі відображаються в адресному просторі. Адреси зарезервовані для 16-розрядних периферійних модулів, вони доступні за допомогою команд-слів. Якщо використаються однобітні команди, то припускаються лише парні адреси, при цьому старший біт результату завжди буде містити «0». Читання бітів модулів за допомогою команд приведе до появи в старшому біті непередбаченого вмісту. Якщо в біт модуля будуть записуватися дані у вигляді слова, то в регістрі периферійного модуля збережеться тільки молодший біт цього слова, старший буде проігнорований.
При включенні мікроконтролера вивід RST/NMI конфігурується як вивід скидання. Його функціональне призначення визначається в регістрі керування сторожовим таймером WDTCTL. Якщо вивід RST/NMI запрограмований на функцію скидання, центральний периферійний пристрій буде перебувати в стані скидання доти, поки на цьому виводі присутній сигнал низького рівня. Після зміни рівня на цьому вході на рівень «1», центральний периферійний пристрій починає виконувати програму з команди, адреса якої зберігається у векторі скидання .
Універсальний синхронно - асинхронний прийомо - передавач (USART) периферійний інтерфейс підтримує два послідовних режими в одному апаратному модулі. В асинхронному режимі USART підключає MSP430 до зовнішньої системи через два зовнішніх виводи: URXD й UTXD. Режим UASRT має наступні особливості:
- 7- або 8-розрядні дані з перевіркою парності/непарності й без контролю парності;
- незалежні регістри передачі й прийому;
- роздільні буферні регістри передачі й прийому;
- передача й прийом починаються з молодшого біта даних ;
- вбудовані комунікаційні протоколи вільної лінії й адресного біта для багатопроцесорних систем;
- визначення в приймачі стартового фронту сигналу для автоматичного пробудження з режимів;
- програмувальна швидкість передачі з модуляцією для підтримки дробових величин швидкостей;
- прапори статусу для виявлення помилок, блокування й визначення адреси;
- можливі незалежні переривання для прийому й передачі.
Модуль АЦП являє собою високоефективний 12-розрядний аналого-цифровий перетворювач. Модуль АЦП12 забезпечує швидкі 12-розрядні
аналого-цифрові перетворення. Модуль має 12-розрядне ядро, схему вибірки, опорний генератор і буфер перетворення й керування. Буфер перетворення й керування дозволяє одержувати й зберігати до 16 незалежних вибірок АЦП
без втручання ЦПП. АЦП 12 має наступні особливості :
- максимальна швидкість перетворення понад 200 ksps ;
- монотонний 12-розрядний перетворювач без кодів помилок;
- вибірка й зберігання із програмувальними періодами вибірки, обумовленими програмним забезпеченням або таймерами;
- перетворення ініціалізується програмним забезпеченням, таймером А або таймером В;
- програмно-обраний інтегрований генератор опорної напруги (1,5В або 2,5В);
- програмно обране внутрішнє або зовнішнє опорне джерело;
- вісім індивідуально конфігуруючих зовнішніх вхідних каналів;
- канали перетворення для внутрішнього температурного датчика, AVCC і зовнішніх опорних джерел;
- незалежні опорні джерела, що задають шляхом вибору каналу, для обох позитивних і негативних опорних джерел;
- джерело тактування перетворень;
- одноканальний, повторний одноканальний, послідовний і повторно-послідовний режими перетворення;
- ядро АЦП й опорна напруга можуть вимикатися роздільно;
- регістр вектора переривань для швидкого декодування 18 переривань АЦП ;
- 16 регістрів зберігання результату.
Дванадцятирозрядне ядро АЦП перетворює аналоговий вхідний сигнал в 12-розрядне цифрове подання й зберігає результат у пам'яті перетворень.
Ядро використає два програмно - обраних рівні напруги (VR+ й VR-) для задавання верхньої й нижньої меж перетворення. На цифровому виході
(NADC) представлена повна шкала, коли вхідний сигнал дорівнює або вище VR+, і нуль, коли вхідний сигнал дорівнює або нижче VR-. Вхідний канал й опорні рівні напруги (VR+ й VR-) задаються в пам'яті керування перетвореннями. Формула перетворення для результату АЦП NADC виглядає в такий спосіб:
 (3.1)
(3.1)
Ядро АЦП 12 конфігурується двома керуючими регістрами: ADC12CTL0 й ADC12CTL1. Ядро включається бітом ADC12ON. Якщо ADC12 не використовується, для збереження енергії воно може бути виключено. Біти керування АЦП12 можуть бути модифіковані, тільки коли ENC=0. ENC повинен бути в стані логічної «1» перед виконанням будь-якого перетворення.
Вісім зовнішніх і чотири внутрішніх аналогових сигнали вибираються як канал для перетворення аналоговим вхідним мультиплексором. Вхідний мультиплексор має тип break-before-make (розрив перед включенням), що зменшує інжекцію шумів від каналу до каналу, що виникає при перемиканні каналів. Вхідний мультиплексор також є Т-перемикачем, що мінімізує взаємозв'язок між каналами. Невибрані канали ізольовані від АЦП, а проміжний вузол підключений до аналогової землі (AVSS), тому паразитна ємність заземлюється, що допомагає усувати перехресні перешкоди.
АЦП використовує метод перерозподілу заряду. Коли входи внутрішньо перемикаються, перемикання може привести до перехідних процесів на вхідному сигналі. Ці перехідні процеси загасають і встановлюються до появи помилкового перетворення.
Відмінними рисами мікроконтролерів MSP430 є висока якість виготовлення, невелика кількість апаратних та програмних помилок та наднизьке енегроспоживання
Основні характеристики MSP430F149:
- об’єм Flash-пам’яті 60 Кбайт;
- об’єм оперативної пам’яті 2 Кбайт;
- напруга живлення 1.8 - 3.6 V;
- низьке споживання струму : 280 mk, 1MHz, 2.2 V, 2.5 mk, 4 kHz, 2.2V;
- п'ять режимів зниження споживання струму: LPM0-LPM4 (30 mk - 0.8 mk);
- повернення в робочий режим за 6 mk;
- 16-бітова RISC архітектура, час виконання інструкції - 125 nS;
- єдний 32 кГц керамічний резонатор, внутрішня системна частота - до 3.3 МГц;
- 16-бітовий таймер з 6 регістрами спостереження/порівняння;
- 16-бітовий таймер з 3 регістрами спостереження/порівняння;
- вбудований компаратор;
- 12 розрядний АЦП із джерелом опорної напруги;
- сторожовий таймер ( 16 біт );
- порти вводу-виводу : 32 ліній;
- два апаратних незалежних послідовних порта введення- виведення USART;
- послідовне програмування ( JTAG );
- корпус: 64 QFP.
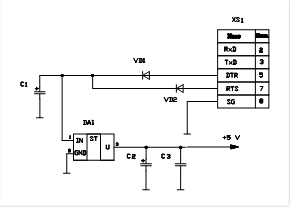
Функціональна схема мікроконтролера MSP430F149 представлена на рисунку 3.2.

Рисунок 3.2 – Схема підключення мікроконтролера MSP430F149
Перевагами їх є широко розвинута периферія, ідеально підходять для керуванням технологічними процесами.
До виводів XIN, XOUT мікроконтролера підключається кварцевий резонатор ZQ, який задає частоту роботи контролера. Таке підключення дозволяє дуже точно задати тактову частоту мікроконтролера (розсіювання
частот зазвичай становить не більше 0,01%). Такий рівень точності необхідний для організації інтерфейсу мікроконтролера з іншими пристроями. Номінали ємностей конденсаторів в даній схемі підключення визначаються виробником мікроконтролера для конкретної резонансної частоти кварца. При використанні малих ємностей тактові імпульси будуть мати кращу форму, оскільки при підключені дуже великої ємності це призведе до деградації форми імпульсів і мікроконтролер не буде запускатися. Запуск мікроконтролера повинен відбуватись лише тоді, коли встановилась необхідна напруга живлення. Для цього використовують вивід RESET (скидання мікроконтролера в початковий стан).
Похожие работы
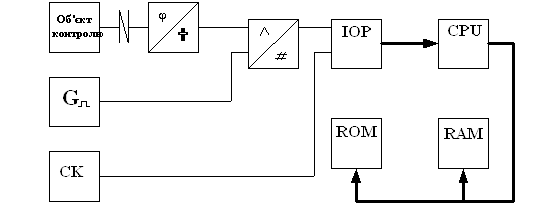
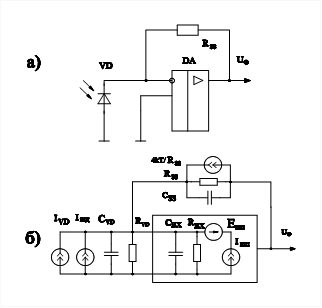
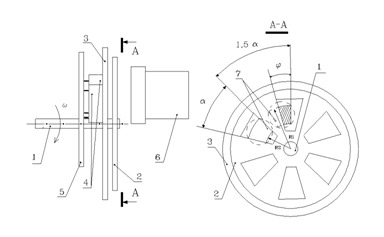
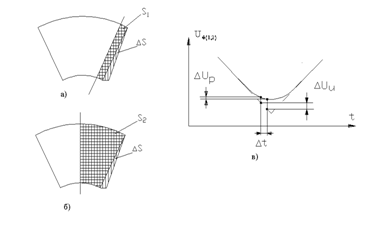
... дипломного проекту. Рисунок 3.1 – Схема електрична структурна пристрою контролю середнього значення кутової швидкості 4. Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом 4.1 Аналіз лінійного фотоприймача Фотоелектричні перетворювачі площа-напруга (ППН) використовуються у багатьох пристроях, таких як перетворювач ...
... виході мікроконтролера в рівні RS-232 використовується відповідний перетворювач, як це наведено на структурній схемі. 3. Розробка електричної принципової схеми комп’ютерного засобу вимірювання тиску і температури у кліматичній камері Електрична принципова схема розробленого пристрою наведена у графічній частині курсового проекту. Пристрій розрахований на підключення двох перетворювачів, але ...
... і. Недоліки: розрахована на навчання робочих ручним і машино-ручним професіям безпосередньо в учбових умовах 1.3.4 Побудова сводно–тематичного плану професійної підготовки робочого за фахом: «Слюсар по контрольно-вимірювальним приладам і автоматиці» Сводно-тематичний план - це документ, який включає тематику спеціальних дисциплін, регламентує послідовність вивчення тем і кількість годин, ...
... ./ “_____”_________2009р. Виконавець Студент групи x /xxxxxx./ “_____”____________2009р. Харків 2009 ЗАТВЕРДЖЕНО xxx.03077-01 12 01-1-ЛЗ ВІРТУАЛЬНИЙ ВИМІРЮВАЛЬНИЙ КОМПЛЕКС НА БАЗІ УЧБОВОГО ЛАБОРАТОРНОГО СТЕНДУ EV8031 Текст програми xxxxx.03077-01 12 01-1 Аркушів _48_ Харків 2009 ЗМІСТ 1 ТЕКСТ ПРОГРАМНОГО ЗАБЕСПЕЧЕННЯ ...
0 комментариев