Навигация
Передаточные функции звеньев
16998
знаков
2
таблицы
9
изображений
1. Передаточные функции звеньев
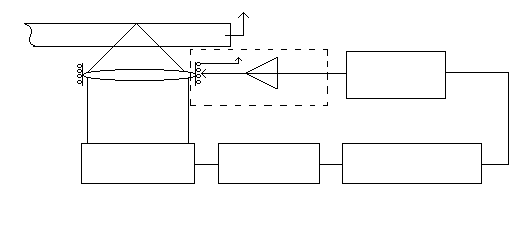
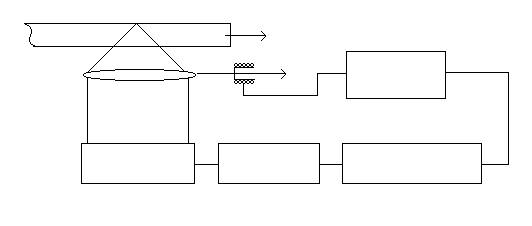
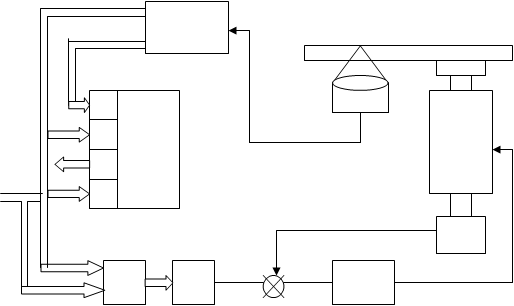
На рис.2. схематически показана САРФ.
| g(t)
У(t) Усилитель мощности
Датчик положения Усилитель Корректирующее устройство |
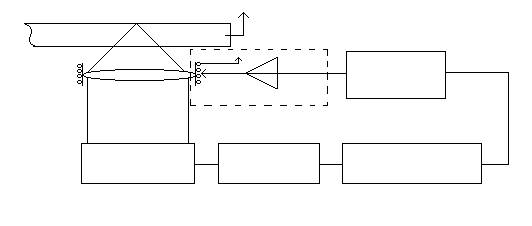
Рис.2. САРФ
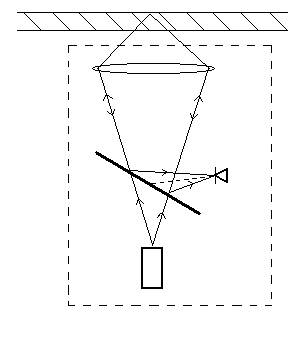
Датчик положения обеспечивает сигнал в виде напряжения постоянного тока, приблизительно пропорциональный ошибке фокусировки. После усиления и коррекции этот сигнал преобразуется в ток, протекающий по катушке, находящейся в магнитном поле (местный электродвигатель), что вызывает появление вертикально направленной силы, приложенной к объективу. Он перемещается в направлении уменьшения ошибки. Из рисунка видно, что САРФ является системой с замкнутой петлей обратной связи.
Для работы такой системы требуется наличие биполярного сигнала ошибки фокусировки. Этот сигнал получают оптическими средствами. Большинство методов получения сигнала ошибки фокусировки основаны на том факте, что лазерный луч отражается диском точно в обратном направлении только в случае, когда фокус находится точно на поверхности диска. Если внести некоторую асимметрию в оптический путь отраженного луча, то появляется возможность выделять сигнал отклонения фокуса от поверхности диска. При этом диск не должен найти никакой информации специально для фокусировки. К наиболее широко используемым методам выделения сигнала ошибки фокусировки относится метод ножа Фуко, метод частичного перекрытия зрачка и астигматический метод.
Во всех этих методах при выделении и формировании сигналов ошибки высокочастотные составляющие сигнала с фотоприемника интереса не представляют. Сигнал с фотоприемника поступает на низкочастотный фильтр, который подавляет высокочастотные колебания, обусловленные питами или отверстиями. Можно сказать, что питы так быстро движутся перед объективом, что сливаются в единую дорожку усредненной промежуточной интенсивности.
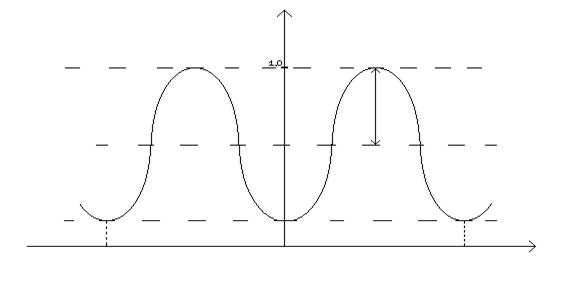
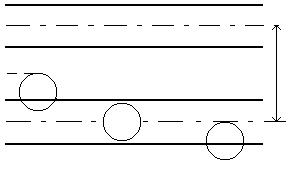
При использовании метода ножа Фуко бипризма размечается при согласованном состоянии в фокусе. Это позволяет увеличить крутизну характеристики сигнала расфокусировки, которая приведена на рис.3.
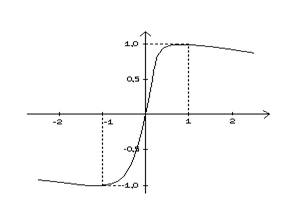 UФ
UФ
х[мкм]
Рис.3. Характеристика сигнала расфокусировки, полученная методом ножа Фуко.
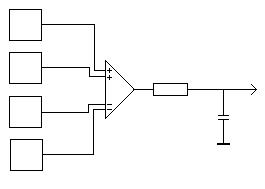
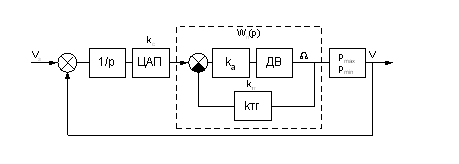
При использовании любого метода определения ошибки фокусировки, датчик положения можно условно представить в виде схемы, приведенной на рис.4., состоящей из суммирующего усилителя с коэффициентом передачи КУ и фильтра низких частот.
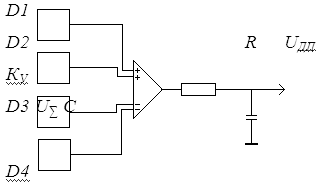
Рис.4. Схема датчика положения.
Уравнения, описывающие эту схему при неограниченной мощности усилителя и бесконечно большом входном сопротивлении следующего каскада, имеют вид:
 , (1)
, (1)
где: UФ - сигнал расфокусировки;
RУ - коэффициент передачи суммирующего усилителя;
UДП - сигнал на выходе датчика положения;
![]() - постоянная времени фильтра низких частот;
- постоянная времени фильтра низких частот;
![]() - Оператор дифференцирования;
- Оператор дифференцирования;
x – сигнал ошибки фокусировки;
Кф– крутизна характеристики сигнала расфокусировки.
Значение Кф путем линеаризации характеристики в точке начала координат, а Тф скоростью потока данных, считываемых с дорожки диска и может быть выбрана по выражению:
![]() >(3
>(3![]() 5)
5)![]() ;
;
где: л – максимальное расстояние между двумя переходами от пита к ленду в канальном ходе на дорожке диска (обычно л=10);
f – скорость считывания канального хода (потока данных) бит/с.
Wдп(P) = (КуКф)/(Тф+1)
Тф = (4л)/(2pf) = л/(7pf) = 10*10-6/(7*3,14*300) = 1,5*10-9;
Кф = 2,87 (В/мкм);
Wдп(P) = 11,48/(1,5*10-9Т + 1);
Усилитель и усилитель мощности с высокой степенью точности можно представить как безинерционные звенья с коэффициентами передачи kус и kум соответственно. Передаточная функция корректирующего устройства определяется на этапе синтеза САРФ, исходя из требований точности устойчивости и качества переходного процесса.
Сигнал выхода усилителя мощности поступает на исполнительный двигатель, как правило линейный электродвигатель (ЛЭД), работающий по принципу громкоговорителя. Составными частями такого двигателя являются: катушка, постоянный магнит и, возможно, магнитопровод из магнитномягкого железа.
Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
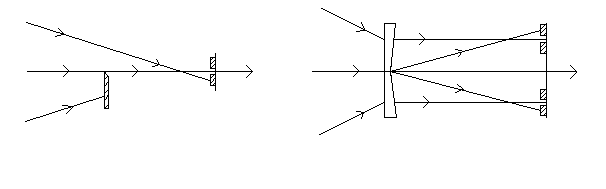
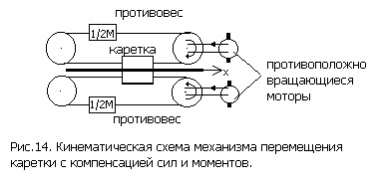
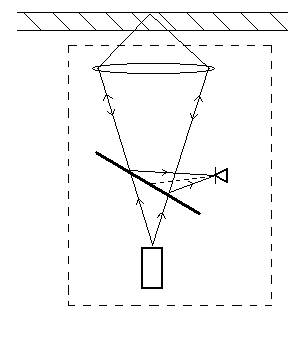
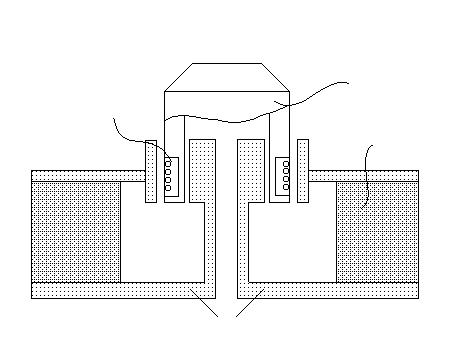
Конструкция с подвижной катушкой (рис.5) имеет ряд преимуществ и недостатков. Помимо проблем обрыва проводников, подводящих ток к катушке, движущая часть имеет обычно плохой тепловой контакт с окружающей средой (высокое тепловое сопротивление RT). Тепло, выделяющееся в подвижной катушке, приводит к росту температуры всей подвижной части, в частности объектива, что нежелательно. Это в конечном счете приводит к уменьшению среднего значения силы, развиваемой данным ЛЭД.
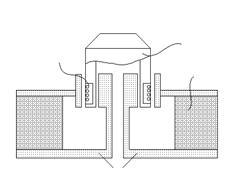
Рис.5. Привод головки с подвижной катушкой.
Достоинством системы с подвижной катушкой является то, что стационарная магнитная система может быть увеличена и, следовательно, с ее помощью можно обеспечить более сильное магнитное поле (высокое значение магнитной индукции В).
Альтернативным решением может быть конструкция с подвижным постоянным магнитом и неподвижной катушкой. В этом случае отвод тепла от катушки не является серьезной проблемой (низкое RT) и максимально допустимая температура катушки Ткат maxможет быть выше, так как она изолирована от объектива. Но развиваемая ЛЭД сила будет меньше из-за ослабления магнитного поля (низкое В), поскольку объем магнита меньше. Увеличение же магнита нежелательно, так как приводит к возрастанию массы подвижной части, что ухудшает динамические свойства САРФ.
Поэтому в реальных конструкциях применяется ЛЭД с подвижной катушкой.
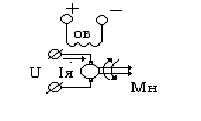
Поскольку оба типа ЛЭД являются одинаковыми по принципу действия и различаются лишь подвижностью составляющих их частей, уравнения, описывающие их поведение можно представить в виде:
 ,
,
где: L – индуктивность катушки;
R=Rк+Rум - сопротивление катушки и внутреннее сопротивление усилителя мощности;
I - ток катушки;
В – магнитная индукция;
l – Длина проводника катушки в магнитном поле;
F – Сила действующая на катушку;
UУМ – напряжение на выходе усилителя мощности, или в операторной форме:
(Т·Р+1) F=LлэдUум; (2)
где ![]() - постоянная времени ЛЭД;
- постоянная времени ЛЭД;
![]() - коэффициент передачи ЛЭД;
- коэффициент передачи ЛЭД;
l = р dk W;
W – Число витков катушки ЛЭД.
Определим передаточную Функцию ЛЭД:
WЛЭД = LЛЭД/(TP + 1);
Подставим значения:
WЛЭД = 4,71/(5*10-4P + 1).
В общем случае движение подвижной части зависит от воздействий, обусловленных наличием упругих элементов, рассеянием энергии в катушке при ее движении в магнитном поле, особенностей подвески подвижной системы.
Основная цель, стоящая при разработке подвески, обеспечить движение головки только по жестко заданным направлениям. Подвески могут быть с помощью линейных подшипников механического или электромагнитного типа и пружинных гибких направляющих. В первом случае перемещение в направлении регулирования ничем не ограничивается, а в перпендикулярных направлениях предотвращается путем выбора соответствующих подшипников с минимально возможными допусками у механических и максимальной жесткостью у электромагнитных. Тогда с учетом демпфирования в подвесе и диссинации энергии в катушке, уравнения движения подвижной части имеют вид:
![]() ,
,
где ![]() - коэффициент вязкого трения,
- коэффициент вязкого трения,
или в операторной форме
![]() ,
,
где ![]()
![]() .
.
k = 1/0.03 = 33;
T1 = 0.33;
Определим передаточную функцию подвижной головки:
Wп = k/P(T1P +1);
Подставим значения:
Wп = 33/P(0.33P + 1).
Похожие работы

... вращающегося диска. В настоящее время оптические дисковые системы снабжены пятью системами автоматизированного регулирования, а именно: – Вращения диска (САРВ); – Тангенциального слежения (САРТ); – Радиального слежения за дорожкой (САРД); – Радиального перемещения каретки (САРРП); – Вертикального слежения за фокусировкой (САРФ). 1. Описание работы САР На рис.1. схематически ...
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
... информационной дорожки, причем величина ПС будет минимальной, если пятно находится на дорожке (в этом случае отражение света минимальное). Зависимость величины ПС сигнала от радиального положения пятна приведена на Рис.2.2. При , где n = 0, 1, 2, …, а q – расстояние между дорожками предполагается, что центр пятна совмещен с центральной линией дорожки. Относительный ...
... ); – Тангенциального слежения (САРТ); – Радиального слежения за дорожкой (САРД); – Радиального перемещения каретки (САРРП); – Вертикального слежения за фокусировкой (САРФ). 1. Система автоматического регулирования скорости вращения диска В оптических дисковых системах считывание информации с компакт-диска производится с постоянной скоростью. Для этого необходимо поддерживать линейную ...
0 комментариев