Навигация
Определение передаточных функций звеньев
14923
знака
1
таблица
7
изображений
2. Определение передаточных функций звеньев
Синтез САР. Вычисление передаточной функции двигателя.
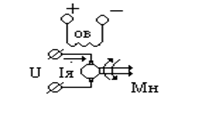
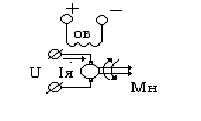
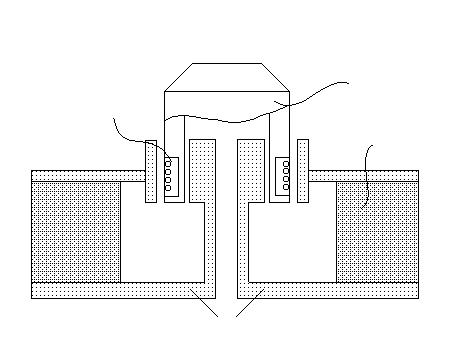
В проекте используются электродвигатель постоянного тока с независимым возбуждением. Система уравнений для такого двигателя при управлении по цепи якоря имеет вид:
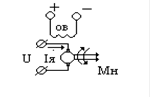
Рис.1. Двигатель постоянного тока
Lя![]() + rя×iя - Cе×W=U(9)
+ rя×iя - Cе×W=U(9)
См×iя – I ![]() =Mн (10)
=Mн (10)
где Lя и rя - индуктивность и сопротивление нагрузки якорной цепи;
iя - ток якоря;
I - момент инерции якоря;
Се и См - коэффициенты пропорциональности между скоростью вращения и противо-э.д.с и между током якоря и вращающим моментом.
Вводя оператор ![]() и решая уравнение относительно скорости вращения
и решая уравнение относительно скорости вращения ![]() , получим
, получим
 ;
;
Примем ![]() . Тогда получим:
. Тогда получим:
![]() ;
;
Данная зависимость представляет собой линеаризованные механические характеристики двигателя постоянного тока. Следовательно коэффициент ![]() может быть подсчитан по паспортным данным двигателя
может быть подсчитан по паспортным данным двигателя
![]() ;
;
где ![]() - номинальное напряжение двигателя;
- номинальное напряжение двигателя;
W0 - угловая скорость идеального холостого хода (при U=Uном и Mн=0);
Iном и Мном - номинальный ток якоря и вращающий момент.
Вычислим электромеханическую постоянную времени:
![]() ;
;
Подставим численные значения в уравнение зависимости ![]() :
:
![]() ;
;
Упростив уравнение ![]() , получим передаточную функцию двигателя:
, получим передаточную функцию двигателя:
![]() ;
;
Из уравнения видно, что коэффициент передачи двигателя ![]() .
.
Синтез корректирующего устройства.
Корректирующего звено вводится в систему регулирования, по средствам отрицательной обратной связи. Корректирующее устройство, представляет из себя идеальное безынерционное звено, с передаточной функцией:
![]() ;
;
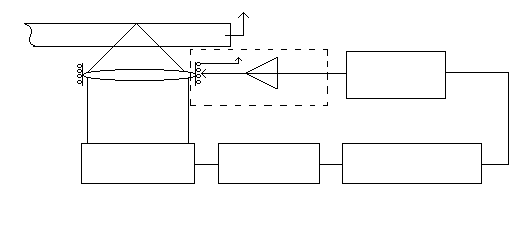
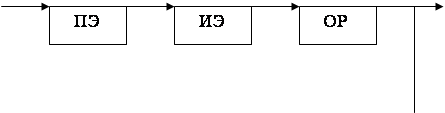
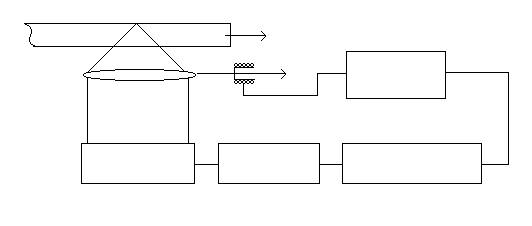
Структурная схема САРВ имеет вид:
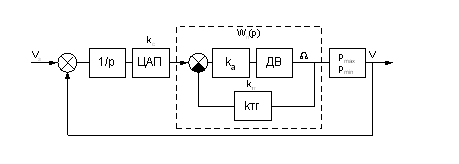
Рис.2. Структурная схема САРВ
Передаточная функция разомкнутой системы имеет вид:
![]() ,
,
Где ![]() -коэффициент передачи ЦАП;
-коэффициент передачи ЦАП;
![]()
Радиус ![]() определяется как
определяется как
![]() = 80 мм =0.8 м.
= 80 мм =0.8 м.
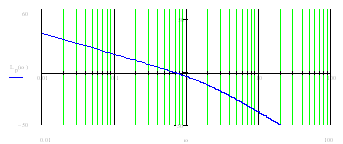 |
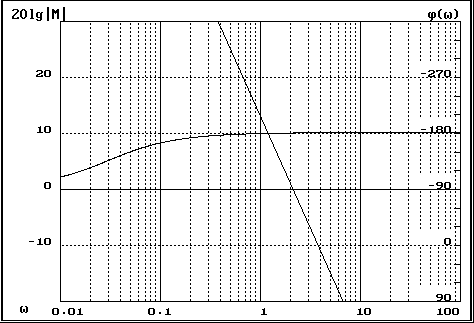
Построим ЛАЧХ и ЛФЧХ разомкнутой системы:
Оценим ошибку, вызванную постоянным входным воздействием вида:
![]()
Добьемся требуемого качества установившегося режима. Система должна обеспечивать точность Dvmax = 10 мм/c при входном воздействии gmax=500 мм, отсюда можно найти суммарный коэффициент усиления всех звеньев системы.
![]()
ЛАЧХ должна располагаться выше контрольной точки Ak имеющая координаты(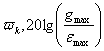 )
)
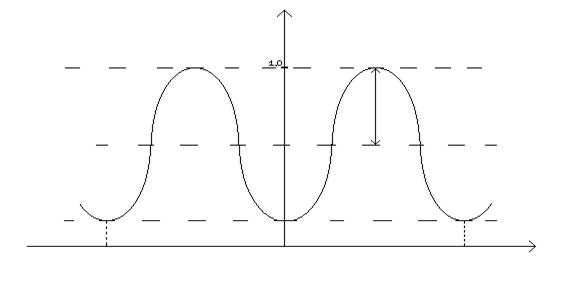
В этом случае значение ошибки так же будет иметь синусоидальный характер:
График зависимости ошибки от времени имеет вид:
Т.к. амплитуда ошибки меньше Dvmax = 10 мм/c, то система регулирования удовлетворяет заданным критериям точности.
Корректировка системы происходит за счет изменения значения коэффициента ![]()
Для увеличения устойчивости, ЛАЧХ разомкнутой системы на частоте wмдолжна иметь значение: ![]() , где M=1.5-показатель колебательности
, где M=1.5-показатель колебательности
Зачение wм, находим поформулам:

 |
Где w0-базовая частота. Ее находим по ЛАЧХ ,как точку пересечения с осью абцисс.
![]()
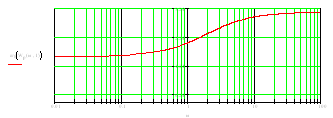
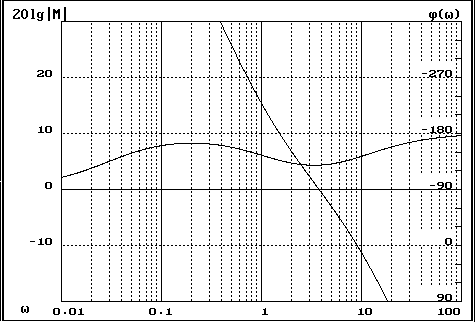
ЛАЧХ скорректированной системы имеет вид:
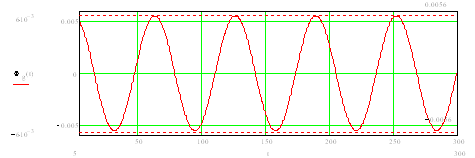
Временная характеристика переходного процесса, вызванного воздействием на систему функцией 1(t) имеет вид:
Т.о. требование значения показателя колебательности системы M=1.5 выполняется.
Заключение
Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечение запаса устойчивости. Это объясняется тем, что стремление снизить ошибки системы регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер система вообще оказывается неустойчивой.
При решении задачи повышения запаса устойчивости проектируемой системы регулирования прежде всего необходимо попытаться рациональным образом изменить ее параметры (коэффициенты передачи отдельных звеньев, постоянные времени и т. п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями.
Для оценки качества любой системы регулирования, в том числе и следящей системы, необходимо знать ее точность, характеризуемую ошибками в некоторых типовых режимах, быстродействие, определяемое по способности системы работать при больших скоростях и ускорениях входного воздействия или по быстроте протекания переходных процессов, и запас устойчивости, показывающий склонность системы к колебаниям. В соответствии с этим можно говорить о критериях точности, критериях быстродействия и критериях запаса устойчивости. При использовании частотных критериев необходимо основываться на тех или иных частотных свойствах системы регулирования.
Библиографический список
1. Сапаров В.Е., Максимов Н.А. Системы стандартов в электросвязи и радиоэлектронике. М.: Радио и связь, 1985. 248 с.
2. Микропроцессорные системы автоматического управления./Под ред. Бесекерского В.А. Л., Машиностроение, 1988.
3. Бесекерский В.А., Изранцев В.В. Системы автоматического управления с микроЭВМ. М., Наука, 1987.
4. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. М., Наука, 1975.
5. Теория автоматического управления./Под ред. Воронова А.А. М., Высшая школа, 1986, Т.1, 2.
Похожие работы

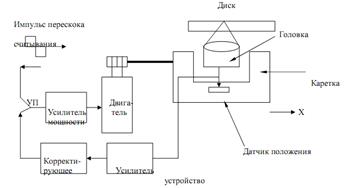

... , а именно: –Вращения диска (САРВ); –Тангенциального слежения (САРТ); –Радиального слежения за дорожкой (САРД); –Радиального перемещения каретки (САРРП); – Вертикального слежения за фокусировкой (САРФ). 2. Описание работы САРРП Системы радиального слежения за дорожкой обычно имеют малый диапазон смещения пятна. Для считывающей головки это, как правило, электромеханические ограничения, ...
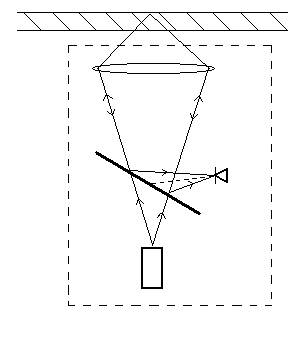
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...

... вращающегося диска. В настоящее время оптические дисковые системы снабжены пятью системами автоматизированного регулирования, а именно: – Вращения диска (САРВ); – Тангенциального слежения (САРТ); – Радиального слежения за дорожкой (САРД); – Радиального перемещения каретки (САРРП); – Вертикального слежения за фокусировкой (САРФ). 1. Описание работы САР На рис.1. схематически ...
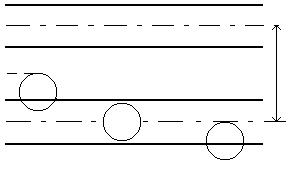
... информационной дорожки, причем величина ПС будет минимальной, если пятно находится на дорожке (в этом случае отражение света минимальное). Зависимость величины ПС сигнала от радиального положения пятна приведена на Рис.2.2. При , где n = 0, 1, 2, …, а q – расстояние между дорожками предполагается, что центр пятна совмещен с центральной линией дорожки. Относительный ...
0 комментариев