Навигация
Микропрограммные автоматы
34836
знаков
6
таблиц
6
изображений
Введение
Тема курсовой работы по дисциплине «Прикладная теория цифровых автоматов» – «Микропрограмные автоматы».
Цель курсовой работы – ознакомиться с основными понятиями; принципами микропрограммного управления; концепцией управляющего и операционного автоматов; управляющими автоматами с жесткой и программируемой логикой; научиться строить графы схем алгоритмов; проводить синтез управляющего автомата по граф-схеме алгоритма; строить УА с программируемой логикой на основе ПЗУ и общей структурой микропроцессорного вычислительного устройства.
1. Основные понятия. Принцип микропрограммного управления
Рассмотренные методы и приемы синтеза дискретных устройств (ДУ) использовали их представление в виде совокупности двух основных блоков: комбинационного логического и блока элементов памяти. Такой подход обладает универсальностью и обеспечивает хорошие результаты при построении относительно несложных ДУ. Однако полученные на его основе процедуры синтеза ДУ оказываются чрезмерно громоздкими и трудоемкими при построении устройств средней и большой сложности, имеющих важное практическое значение. Работа таких устройств обычно заключается в реализации некоторого алгоритма обработки информации, т.е. в выполнении упорядоченной последовательности определенных операций над поступающими данными. При построении таких ДУ целесообразно использовать принцип микропрограммного управления, состоящий в следующем:
1) любая операция, реализуемая устройством, рассматривается как сложное действие, которое разделяется на последовательность элементарных действий, называемых микрооперациями;
2) для управления порядком следования микроопераций используются логические условия хi, принимающие в зависимости от результатов выполнения микроопераций значения 1 или 0;
3) процесс выполнения операций в устройстве описывается в форме алгоритма, представленного в терминах микроопераций и логических условий и называемого микропрограммой;
4) микропрограмма используется как форма представления функции устройства, на основе которой определяются его структура и порядок функционирования.
Все сказанное можно рассматривать, как содержательное описание принципа микропрограммного управления.
2. Концепция управляющего и операционного автоматов
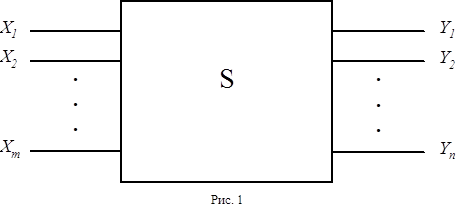
При использовании описанного принципа принято делить ДУ на две части: операционный автомат (ОА) и управляющий автомат (УА) (рис. 1).
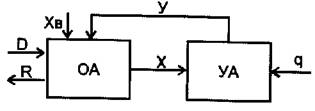
Рисунок 1. Обобщенная структурная схема микропрограммного дискретного устройства
ОА предназначен для хранения поступающей информации D, выдачи результатов выполнения операций R, выполнения заданного набора микроопераций, выработки значений логических условий Х=(x0, x1,…, xm), которые являются оповещающими сигналами для управляющего автомата. УА генерирует последовательность управляющих сигналов Y=(y1, y2,…, yn) в соответствии с заданной микропрограммой и со значениями логических условий X. Каждый управляющий сигнал инициирует выполнение соответствующей микрооперации в ОА.
В общем случае ДУ предназначается для выполнения ряда микропрограмм, и на УА подается внешний сигнал q, в соответствии с которым начинается выполнение той или иной микропрограммы. Если ДУ является частью системы обработки информации, то оно может также обмениваться специальными сигналами логических условий XB и управления YB с другими блоками системы.
В состав ОА входят главным образом типовые функциональные узлы: регистры, счетчики, сумматоры, дешифраторы, шифраторы, арифметико-логические устройства (АЛУ), схемы сравнения, блоки памяти, схемы пересылки данных и т.п. Число элементов памяти (ЭП), содержащихся в ОА, определяется разрядностью обрабатываемых данных nД, которая может быть достаточно большой. Однако трудоемкость и сложность проектирования ОА, как правило, слабо зависят от nД в силу широкого использования стандартных узлов. Таким образом, ОА является исполнительной частью устройства; его состав и структура могут быть одинаковыми для реализации многих алгоритмов одного класса.
Элементарный неделимый акт обработки информации в операционном автомате, происходящий в течение одного момента автоматного времени (одного такта работы автомата), называется микрооперацией. Примерами микроопераций могут служить «Сдвиг информации», «+1», «Инверсия переменной» и т.д.
Если в операционном автомате одновременно реализуется несколько микроопераций, то такое множество микроопераций называется микрокомандой. Не исключен случай, когда множество микроопераций, образующих микрокоманду, пусто. Реализация такой микрокоманды в операционном автомате равносильна отсутствию выполнения каких-либо элементарных операций. В случае синхронных дискретных устройств пустая микрокоманда интерпретируется как пропуск такта, когда никакие сигналы от управляющего автомата на операционный автомат не поступают.
Микрооперации возбуждаются выходными сигналами управляющего автомата, а их последовательность во времени определяется функциями перехода управляющего автомата.
Совокупность микрокоманд и функций перехода образует микропрограмму. Таким образом, для описания микропрограммы необходимо задать множество микрокоманд и функций перехода, определяющих порядок их выполнения. Для описания микропрограмм удобно использовать язык граф-схем алгоритмов (ГСА).
3. Управляющие автоматы с жесткой и программируемой логикой
Объем оборудования УА зависит от сложности реализуемого алгоритма и от структуры этого автомата, которую можно выполнить в трех вариантах.
1. УА с жесткой (схемной, произвольной) логикой, при которой переключательные функции, необходимые для формирования заданной последовательности управляющих сигналов У, реализуются с помощью логических элементов с произвольными связями (обычно с применением схем с малой и средней степенями интеграции). Здесь используется аппаратный подход к реализации устройства.
2. УА с хранимой в памяти (гибкой, программной) логикой, при которой сигналы У вырабатываются на основе совокупности управляющих слов, хранимых в памяти автомата. В этом случае составленные микропрограммы используются в явной форме и обычно записываются в постоянные запоминающие устройства (ПЗУ), выполненные на основе полупроводниковых БИС большой емкости, что позволяет обеспечить регулярность структуры УА и его компактность; здесь используется аппаратно-программный подход к реализации устройства.
3. УА на основе программируемых логических матриц (ПЛМ), в которых заданные функции реализуются с помощью БИС ПЛМ, что позволяет сочетать многие достоинства первых двух вариантов.
Таким образом, использование принципа микропрограммного управления позволяет упорядочить и упростить процедуру логического проектирования ДУ, обеспечить регулярность их структуры, а также открывает возможность широкого применения современных БИС. Принцип микропрограммирования применяется при создании микропроцессоров и устройств на их основе. Это не только позволяет упорядочить управление, но и дает возможность формировать систему команд микропроцессоров по своему усмотрению, исходя из имеющейся системы микрокоманд.
Рассмотрим порядок проектирования микропрограммного ДУ, который состоит из следующих основных этапов:
Запись алгоритма.
По описанию отдельных алгоритмов, реализуемых устройством, составляется их формализованная запись в виде граф-схем алгоритмов (ГСА). Для этого составляется список необходимых микроопераций Уj, и соответствующих им управляющих сигналов уj, а также логических условий хi; Далее при необходимости производится минимизация числа вершин ГСА и составляется объединенный ГСА, являющийся формой здания ДУ для выполнения следующих этапов.
Построение ОА.
В общем случае ОА может быть построен по канонической схеме автомата и содержит три основные части: блок элементов памяти для хранения операндов, а также промежуточных и конечных результатов; комбинационную схему, реализующую набор микроопераций; комбинационную схему, вырабатывающую значения логических условий. Как уже отмечалось, при построении ОА целесообразно применять типовые узлы, а также стремиться использовать отдельные узлы для выполнения нескольких микроопераций.
Построение УА.
Сначала выбирают вариант структуры УА, учитывая требования быстродействия, допустимый объем аппаратуры и другие ограничения. Далее осуществляется синтез УА в соответствии с процедурой, зависящей от принятой структуры автомата.
В результате выполнения этих этапов составляют структурные схемы ОА и УА и переходят к техническому проектированию, которое включает вопросы практической реализации схемы устройства на выбранной элементной базе, введение необходимых развязывающих, усиливающих и формирующих каскадов, компоновку деталей на платах, составление монтажных схем и выдачу технической документации.
Похожие работы
... кодировщика манчестерского кода. Полная принципиальная схема кодировщика представлена в приложении. 3 СИМУЛЯЦИЯ СХЕМЫ В САПР ALTERA QUARTUS II Схема , реализующая микропрограммный автомат на ПЗУ для кодирования манчестерского кода представлена на рисунке 3.1. Карта прошивки ПЗУ представлена на рисунке 3.2. Рисунок 4.1 – Кодировщик манчестерского кода Рисунок 3.2 – Карта прошивки ...
... состоянии am. Рассмотренные выше абстрактные автоматы можно разделить на: 1) полностью определенные и частичные; 2) детерминированные и вероятностные; 3) синхронные и асинхронные; Полностью определенным называется абстрактный цифровой автомат, у которого функция переходов и функция выходов определены для всех пар ( ai, zj). Частичным называется абстрактный автомат, у которого функция ...
... MK Совокупность МО Y1 y1,y2,y3 Y2 y2 Y3 y3 Y4 y4 Y5 y5 Y6 y4,y6 Y7 y7 Y8 y8 Y9 y1,y3 Каждой условной вершине содержательной ГСА поставим в соответствие один из входных сигналов управляющего автомата X1, … ,X9, список которых дан в таблице 6. Таблица 6 Входной сигнал УА X1 X2 X3 X4 X5 X6 X7 X8 X9 Логическое условие ОА ...
... покажет уровень полученных нами знаний по курсу «Прикладная теория цифровых автоматов». Задание Выполнить синтез управляющего автомата операции умножения младшими разрядами вперед со сдвигом множимого над числами в форме с фиксированной точкой в формате {1,8}в прямом коде двоичной системы счисления. Разработать микропрограмму и выполнить синтез управляющего автомата используя синхронный ...
0 комментариев