Навигация
1.2 Расчётная часть
1.2.1 Определение параметров датчика положения
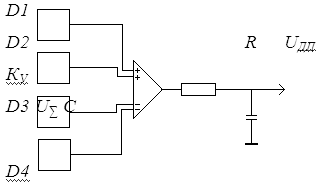
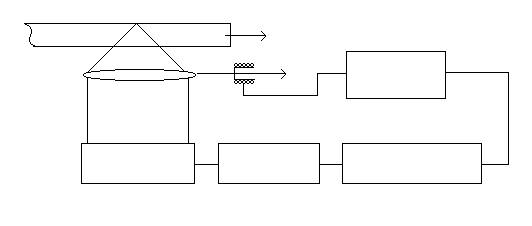
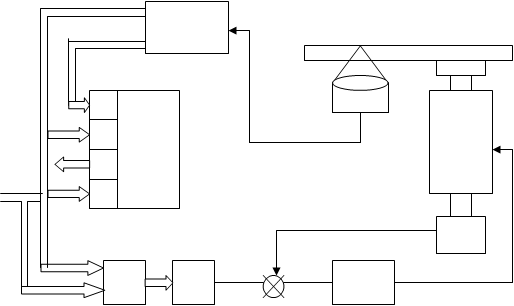
При проектировании систем, использующих такой метод определения ошибки расфокусировки необходима дополнительная проверка максимального отклонения от фокуса. Для проведенной характеристики должно выполнятся условие |XMAX| < 3мкм. Таким образом, при использовании метода определения ошибки фокусировки, датчик положения можно условно представить в виде схемы, приведенной на рис.6., состоящей из суммирующего усилителя с коэффициентом передачи КУ и фильтра низких частот.
|
D1
D2 R UДП КУ
D3 U∑ С
D4
|
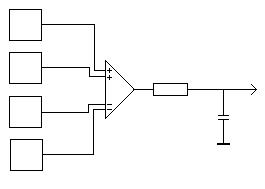
Рис.6. Схема датчика положения.
Уравнения, описывающие эту схему при неограниченной мощности усилителя и бесконечно большом входном сопротивлении следующего каскада, имеют вид:

Где UФ - сигнал расфокусировки;
RУ - коэффициент передачи суммирующего усилителя;
UДП - сигнал на выходе датчика положения;
![]() - постоянная времени фильтра низких частот;
- постоянная времени фильтра низких частот;
![]() - оператор дифференцирования;
- оператор дифференцирования;
x – сигнал ошибки фокусировки;
kФ – крутизна характеристики сигнала расфокусировки.
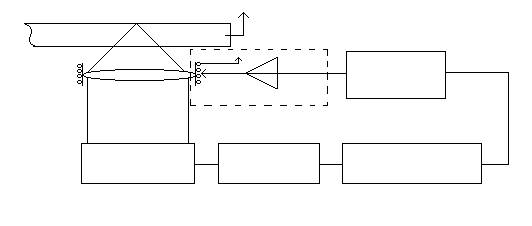
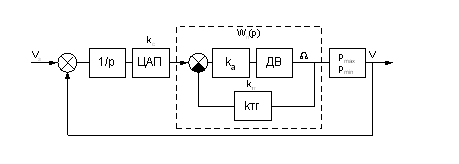
На рис.7. показана структурная схема датчика положения.
X UФ Uå UДП
Рис.7
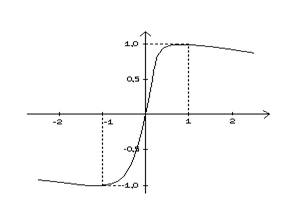
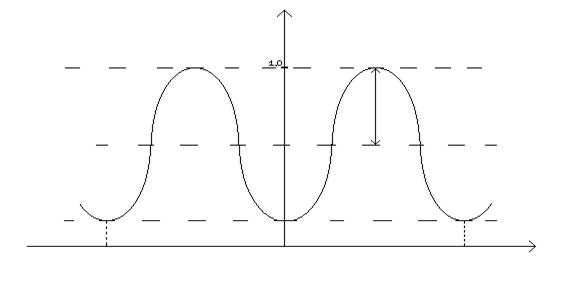
Значение kФ определяется путем линеаризации характеристики в точке начала координат, т.е.
 Uф
Uф
X max
UФ = 1;
x = 2 * 10 –6 (м)
kФ = UФ / x = 0,5 * 10 6
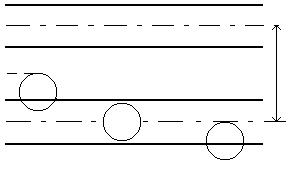
TФ - скорость потока данных, считываемых с дорожки диска может быть выбрана по выражению
![]() >(3
>(3![]() 5)
5)![]()
Где λ – максимальное расстояние между двумя переходами от пита к ленду в канальном ходе на дорожке диска ;
f – скорость считывания канального хода (потока данных) бит/с.
![]() =(3
=(3![]() 5)
5)![]() = p * 8 / 2*p* 14*150000 = 10 –6
= p * 8 / 2*p* 14*150000 = 10 –6
Значение передаточной функции датчика положения определяется по формуле
Wдп(S) = Ky * Kф/ (ТфS + 1) = 3 * 2*10 6 / (10 – 6 * S + 1)
1.2.2 Определение параметров двигателя
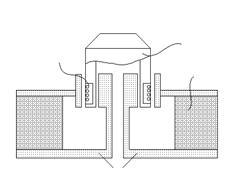
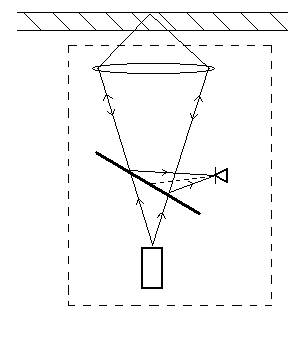
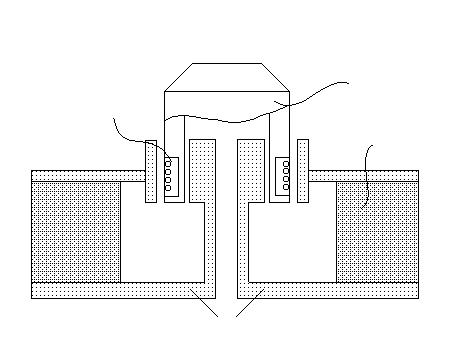
Сигнал выхода усилителя мощности поступает на исполнительный двигатель, как правило линейный электродвигатель (ЛЭД), работающий по принципу громкоговорителя. Составными частями такого двигателя являются: катушка, постоянный магнит и, возможно, магнитопровод из магнитномягкого железа.
Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
Альтернативным решением может быть конструкция с подвижным постоянным магнитом и неподвижной катушкой. В этом случае отвод тепла от катушки не является серьезной проблемой (низкое RT) и максимально допустимая температура катушки Ткат maxможет быть выше, так как она изолирована от объектива. Но развиваемая ЛЭД сила будет меньше из-за ослабления магнитного поля (низкое В), поскольку объем магнита меньше. Увеличение же магнита нежелательно, так как приводит к возрастанию массы подвижной части, что ухудшает динамические свойства САРФ.
Поэтому в реальных конструкциях применяется ЛЭД с подвижной катушкой.
Поскольку оба типа ЛЭД являются одинаковыми по принципу действия и различаются лишь подвижностью составляющих их частей, уравнения, описывающие их поведение можно представить в виде

где: L – индуктивность катушки;
R=Rк+Rум - сопротивление катушки и внутреннее сопротивление усилителя мощности;
I - ток катушки;
В – магнитная индукция;
l – длина проводника катушки в магнитном поле;
F – сила действующая на катушку;
UУМ – напряжение на выходе усилителя мощности,
или в операторной форме
(Т·Р+1) F=LлэдUум
где ![]() - постоянная времени ЛЭД;
- постоянная времени ЛЭД;
![]() - коэффициент передачи ЛЭД;
- коэффициент передачи ЛЭД;
l = π dk W;
W – число витков катушки ЛЭД.
На рис.8. показана структурная схема двигателя.
 |
Рис.8.
Определяем длину проводника катушки в магнитном поле
l = π* dk * W = π * 0,01 * 50 = 1,571 (м)
Определяем коэффициент передачи ЛЭД:
![]() = 1* 1, 571 / 2 = 0,785 (м /Ом)
= 1* 1, 571 / 2 = 0,785 (м /Ом)
Значение передаточной функции ЛЭД находим по формуле
Wдв(S) = Kлэд / (Т*S +1) = 0,785 / ( 10 – 4 * S +1)
Похожие работы
... которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном направлении (вдоль ...
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
... информационной дорожки, причем величина ПС будет минимальной, если пятно находится на дорожке (в этом случае отражение света минимальное). Зависимость величины ПС сигнала от радиального положения пятна приведена на Рис.2.2. При , где n = 0, 1, 2, …, а q – расстояние между дорожками предполагается, что центр пятна совмещен с центральной линией дорожки. Относительный ...
... ); – Тангенциального слежения (САРТ); – Радиального слежения за дорожкой (САРД); – Радиального перемещения каретки (САРРП); – Вертикального слежения за фокусировкой (САРФ). 1. Система автоматического регулирования скорости вращения диска В оптических дисковых системах считывание информации с компакт-диска производится с постоянной скоростью. Для этого необходимо поддерживать линейную ...
0 комментариев