Навигация
Построение механической и регулировочной характеристик электродвигателя
22749
знаков
3
таблицы
12
изображений
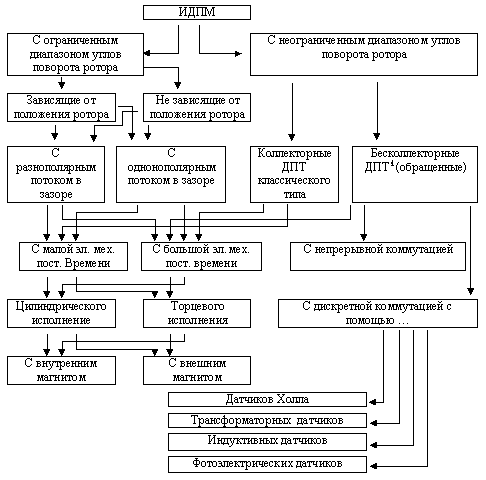
4. Построение механической и регулировочной характеристик электродвигателя
При описании работы двигателя в установившемся режиме используют механическую и регулировочную статические характеристики.
Под механической характеристикой понимают зависимость установившейся средней частоты вращения ротора от среднего значения момента при неизменной отрицательной продолжительности импульсов tu.
Под регулировочной характеристикой понимают зависимость установившейся средней частоты вращения ротора от относительной продолжительности импульсов tu при неизменном среднем моменте на валу двигателя.
В зависимости от соотношения электромагнитной постоянной времени обмотки якоря tя и величины Тu, от схемы управления, момента нагрузки и тока в цепи якоря возможны два основных режима работы двигателя при импульсном управлении: режим прерывистого тока и режим непрерывного тока.
Режим прерывистого тока возможен при tя< Тu и характеризуется тем, что во время паузы tn ток в якоре равен нулю. В технических условиях на двигатель не было указано индуктивности его обмотки, поэтому можно предположить, что она очень мала, и tязаведомо удовлетворяет указанному условию. В этом случае характеристики двигателя определяются следующими выражением:
![]() (*)
(*)
где ![]() - средняя частота вращения вала двигателя;
- средняя частота вращения вала двигателя;
Мср : tu - среднее за период Тu значение вращающего момента.
Все величины - в относительных единицах.
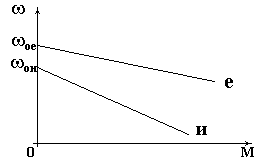
Выражение (*) при tu=const представляет собой уравнение механической характеристики, а при Мср= const уравнение регулировочной характеристики. Из анализа этого выражения можно сделать выводы:
1. Механические характеристики линейны и начинаются из одной общей точки холостого хода (![]() =1, Мср=0). Жесткость механических характеристик, т.е. отношение приращения момента к приращению частоты вращения ротора, уменьшается по мере уменьшения tu.
=1, Мср=0). Жесткость механических характеристик, т.е. отношение приращения момента к приращению частоты вращения ротора, уменьшается по мере уменьшения tu.
2. Регулировочные характеристики нелинейны. Регулирование возможно только при Мср ≠ 0, т.к. при Мср = 0 установившееся значение средней частоты вращения ротора ![]() =1, при любом tu.
=1, при любом tu.
Согласно бланку задания нам требуется построить характеристики двигателя в абсолютных единицах. В числе прочих справочных данных для двигателя имеются следующие:
Номинальная частота вращения nном=4400 об/мин
Номинальный момент на валу двигателя Mном=0,196 Н∙м
Пусковой момент Mпуск=0,49 Н∙м
Теперь запишем уравнение (*) с учетом того что
![]() , а
, а ![]()
![]() (**)
(**)
теперь подставив в уравнение (**) точки (Mном; nном) и (Mпуск;0)(условие равенства скорости двигателя 0 в момент пуска), и для простоты вычислений приняв ![]() =1, получаем:
=1, получаем:
![]() об/мин
об/мин
Теперь мы можем построить механические и регулировочные характеристики для данного двигателя.
Построим механические характеристики для ![]() =0,5,
=0,5, ![]() =0,25 и
=0,25 и ![]() =0,1 проще всего это сделать, воспользовавшись уравнением (**) приняв при этом n=0.Найдем координаты первой точки:
=0,1 проще всего это сделать, воспользовавшись уравнением (**) приняв при этом n=0.Найдем координаты первой точки:
|
| 1 | 0.5 | 0.25 | 0,1 |
| n,об/мин | 0 | 0 | 0 | 0 |
| M ,Н∙м | 0,49 | 0,245 | 0,1225 | 0,049 |
Что касается второй точки то, как следует из свойств механической характеристики описанных выше, это будет точка (0,![]() ).Теперь построим механические характеристики.
).Теперь построим механические характеристики.
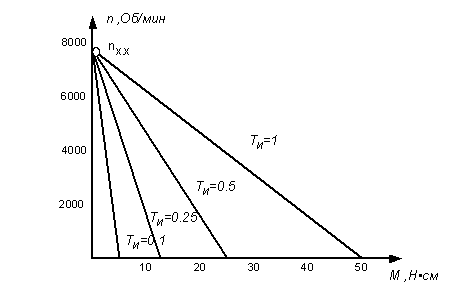
Рисунок 11 - Механические характеристики.
Теперь построим регулировочные характеристики, для этого воспользуемся уравнением (**). Составим следующую таблицу:
При ![]() Н∙м
Н∙м
|
| 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 |
| n,об/мин | 0 | 3666 | 4888 | 5499 | 5866 | 6111 | 6285 | 6416 | 6518 | 6599 |
При ![]() Н∙м
Н∙м
|
| 0,25 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1 |
| n,об/мин | 0 | 1222 | 2750 | 3666 | 4277 | 4714 | 5041 | 5296 | 5500 |
При ![]() Н∙м
Н∙м
Теперь построим регулировочные характеристики двигателя:
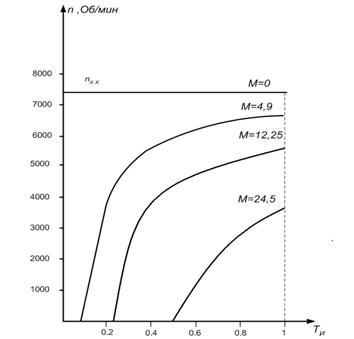 |
Рисунок 12 - Регулировочные характеристики.
Далее изобразим относительный график заполнения импульса и частоты вращения ротора при высоте импульсов Uном и моменте на валу двигателя Mном.
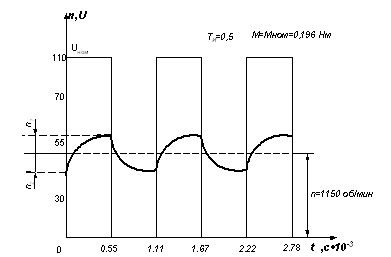
Рисунок 13 - Относительный график заполнения импульса и частоты вращения ротора
Где величины n1и n2 определяются по формулам:
![]()
![]()
Где ![]() - среднее в интервале значение вращающего момента двигателя, отн.ед.;
- среднее в интервале значение вращающего момента двигателя, отн.ед.; ![]() -статический момент сопротивления на валу отн.ед.;
-статический момент сопротивления на валу отн.ед.; ![]() -момент инерции ротора;
-момент инерции ротора;
![]() -постоянная машины.
-постоянная машины.
Заключение
В результате выполнения курсовой работы было рассчитано устройство импульсного управления исполнительным двигателем постоянного тока. В основу расчета лег принцип широтной модуляции сигнала. Применение интегральных схем значительно упростило устройство и повысило его надежность.
При расчете было сделано допущение о малой индуктивности якоря, и весь расчет велся на активное сопротивление обмотки двигателя.
Кроме того, ввиду большого быстродействия транзисторных ключей и сравнительно малой частоты генерирования линейно изменяющегося напряжения переходные процессы в электронных компонентах также не принимались в рассмотрение, и весь расчет велся для устойчивого режима.
В ходе исследования работы двигателя при переменном tuи различных значениях момента М были построены механические и регулировочные характеристики электродвигателя в абсолютных единицах, по которым можно определить характер работы двигателя.
Список используемой литературы
1. Копылов. Справочник по электрическим машинам. – М.:Энергоатомиздат, 1989г – 688с.
2. Основы промышленной электроники. Под ред. проф. В.Г.Герасимова. - М.: Высшая школа, 1986г - 336с.
3. Интегральные микросхемы. Справочник. Под ред. Б.В.Тарабрина. - М.: Радио и связь, 1983г -528с.
4. Брускин Д.Э., Зорохович А.Е., Хвостов В.С. Электрические машины и микромашины. – М.: Высшая школа, 1990г -528с.
5. Подлипенский В.С., Петренко В.Н.Электромагнитные и электромашинные устройства автоматики. – К.: Вища школа, 1987г -592с.
6. Справочник по полупроводниковым диодам, транзисторам и интегральным схемам. Под общ. ред. Н.Н.Горюнова. -М.: Энергия, 1976г -744с.
7. Транзисторы для аппаратуры широкого применения. Справочник. Под ред. Б.Л.Перельмана. -М.: Радио и связь, 1981г -656с.
8. Лукашенков А.В. Электронные устройства автоматики и телемеханики. Лабораторная работа №16. Расчет и исследование бестрансформаторных усилителей мощности. Методические указания. -Тула.: ТулПИ, 1988г -32с.
Похожие работы
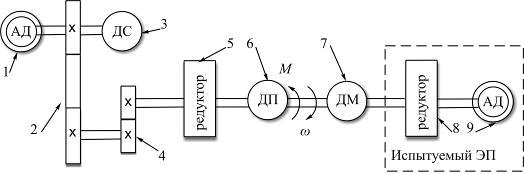
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...


... , Кмат =35 %; К – коэффициент перевода восстановительной стоимости в ценах на 01.01.2000 г., К=6,776. Таблица 5.1 – Локальная смета на приобретение и монтаж лабораторного стенда «Исследование высокомоментного двигателя» Сметная стоимость 1620,7 рублей В том числе: оборудование 867,2 рублей монтажные работы: 482,9 рублей сметная заработная плата: 270,57 ...
... 3 - 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей. До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного ...

... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
0 комментариев