По способу управления, непосредственно кулачковыми контроллерами. Весь процесс управления осуществляется непосредственно оператором (крановщиком)
КВт > 25,2 кВт
КВт > 6,3 кВт
КВт > 11,8 кВт
А ≥ 161 А
Находим ток (базисный)
Для механизмов горизонтального передвижения за базисный момент принимаем момент, необходимый для обеспечения требуемого ускорения
Рассчитаем кабель для двигателя подъема
Навигация
По способу управления, непосредственно кулачковыми контроллерами. Весь процесс управления осуществляется непосредственно оператором (крановщиком)
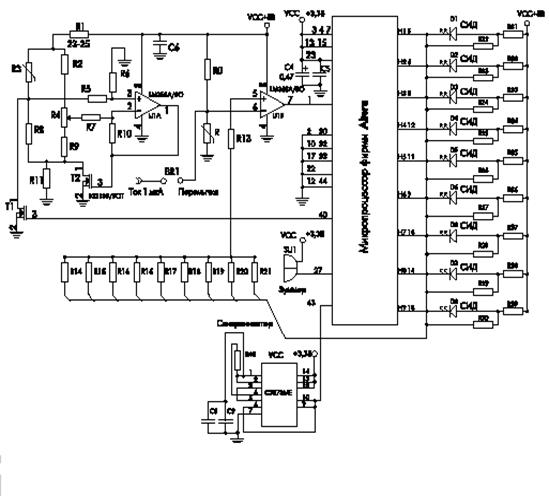
Электрооборудование мостового крана
66563
знака
0
таблиц
1
изображение
1. По способу управления, непосредственно кулачковыми контроллерами. Весь процесс управления осуществляется непосредственно оператором (крановщиком).
2. Управление кнопочными постами. Возможности управления ограничены особенностями пульта.
3. Управление сложным комплексным устройством (магнитным контроллером с использованием преобразователя энергии или без него). Оператор выбирает только необходимые скорости, а процессы разгона, торможения и необходимые промежуточные операции осуществляются автоматически.
Выбор системы управления для крановых механизмов осуществляется на основе анализа сравнительных технических данных, а именно: диапазона регулирования, способа управления, ресурса (уровень износостойкости), диапазона возможных скоростей, мощностей электроприводов, показателей динамики и энергии, а также дополнительных данных, определяющих условия эксплуатации электроприводов. Экономическая оценка систем управления должна базироваться на основании минимальных расходов, связанных с первоначальными затратами, эксплуатационными затратами на ремонт, а также затратами энергии, потребляемой из сети за период эксплуатации до капитального ремонта.
Выбирается система с наилучшими экономическими показателями.
Если к электроприводу крановых механизмов предъявляются повышенные требования в отношении регулирования скорости, обеспечения низких устойчивых условий скорости в различных режимах, то применяются двигатели постоянного тока, которые допускают большие перегрузки по моменту, позволяющие опускать и поднимать тяжелые грузы с пониженной скоростью. Однако использование двигателей постоянного тока внесет необходимость преобразования переменного тока в постоянный, что связано с увеличением капитальных затрат, дополнительных затрат энергии и эксплуатационных расходов.
Наиболее распространенный на кранах электропривод асинхронный с фазным ротором, со ступенчатым регулированием угловой скорости, путем изменения величины сопротивления в цепи ротора. Такой привод достаточно прост, надежен, допускает большое число включений в час и применяется при средних и больших мощностях. С помощью резисторов в цепи ротора можно в широких пределах изменять токи и потери энергии в двигателе при переходных процессах, а также получить понижение угловой скорости.
Выбираем тип электропривода для механизмов крана – электропривод переменного тока, асинхронный двигатель с фазным ротором, управляемый командоконтроллером с пускорегулирующим сопротивлением в цепи ротора. Выбор типа электропривода сделали на основании приведенных выше технических и экономических условий, а также требований, предъявляемых к электроприводу крана.
Однако этот привод неэкономичен из-за значительных потерь энергии в пускорегулирующих сопротивлениях, кроме того, имеет повышенный износ двигателя и контактной аппаратуры управления.
Несмотря на это этот электропривод остается более выгодным по сравнению с приводом на постоянном токе.
Для проектируемого электропривода предназначается напряжение 220V 50Hz.
Расчет мощности и выбор электродвигателей привода механизмов крана
Для большинства крановых механизмов условия работы не могут быть заранее заданы. Условия, определяющие выбор электрооборудования, в том числе и двигателей, сводятся к понятию режима работы. В это понятие входят: полная продолжительность включений, продолжительность включения при регулированием число пусков, коэффициент усредненной статистической нагрузки, годовое и суточное использование крана, степень его ответственности, температурные условия эксплуатации и другие параметры.
Отнесение электрооборудования крана к тому или иному режиму работы является исходным при расчете всех элементов кранового оборудования, а соответствие указанного режима фактическому является непременным условием надежности работы крана.
При выборе двигателей для кранового оборудования наиболее сложным считается расчет мощности по условиям теплового режима работы. Специфические способности крановых машин характеризуются повышенными, постоянными потерями и изменяющимися условиями вентиляции при регулировании, что приводит к большим погрешностям при расчете теплового режима работы двигателя по общепринятым методам эквивалентного тока или момента. Эти методы являются достоверными только тогда, когда фактическая продолжительность включения равна номинальной, а число включений и энергия постоянных потерь в цикле соответствует номинальным расчетным параметрам.
Наиболее рациональным в настоящее время является метод выбора двигателя и расчет их мощности, разработанный заводом «ДИНАМО». В основе этого метода лежит использование эквивалентного КПД, являющегося показателем энергетических свойств системы регулирования и определяющего потери энергии в электроприводе.
Выбор электродвигателя можно разделить на три этапа:
На первом этапе: производят предварительный выбор электродвигателя по нагреву для принятой системы электропривода и известного режима работы на основании формулы:
Рп ≥ ([4] стр. 39 формула 1.56)
([4] стр. 39 формула 1.56)
где Рс.н. – максимальная статистическая мощность при подъеме груза или при передвижении с ним, кВт.
k![]() . – коэффициент, определяющий выбор электродвигателя по нагреву для различных систем электропривода ([4] стр. 37 таб. 12).
. – коэффициент, определяющий выбор электродвигателя по нагреву для различных систем электропривода ([4] стр. 37 таб. 12).
На втором этапе предварительно выбранный электродвигатель с номинальной мощностью Рн проверяют по условию:
Рн ≥  ([4] стр. 39 формула 1.57)
([4] стр. 39 формула 1.57)
где kэкв., kз., Е0., Ер – расчетные коэффициенты, зависящие от режима работы и маховых масс ([4] стр. 39 таб. 13)
Ен – номинальная относительная продолжительность включения.
kн – коэффициент, равный единице для электроприводов переменного тока.
k0 – коэффициент, зависящий от относительной продолжительности включения кранового механизма Е0 ([4] стр. 40 рис. 6).
kp – коэффициент, учитывающий увеличение потерь на регулировочных характеристиках для систем с параметрическим управлением. Его определяют по формуле:
kp = 1 – 1,2 · (Ер – Ер.б.)([4] стр. 40 формула 1.58)
где Ер – относительная продолжительность включения при регулировании ([4] стр. 39 таб. 13).
Ер.б. – базовая относительная продолжительность включения при регулировании.
kд.п. – коэффициент, учитывающий степень влияния динамических потерь на нагрев электродвигателя ([4] стр. 37 формула 1.55).
ηэкв. – эквивалентный КПД
ηэкв.=  ([4] стр. 38 формула 1.55).
([4] стр. 38 формула 1.55).
где ηэкв. – значение эквивалентного КПД, соответствующее заданному числу включений в час Zэкв. ([4] стр. 38 рис. 5).
ηэкв.б. – базовое значение эквивалентного КПД при Z=0 ([4] стр. 37 таб. 12)
GD2 – суммарный маховый момент системы, приведенный к валу двигателя, определяется по формуле:
GD2 = 1,15 GpDp2 + 4 ·  ([4] стр. 26 формула 1.29).
([4] стр. 26 формула 1.29).
где Q – грузоподъемность, т.с.
n – обороты двигателя, об/мин
V – скорость вращения механизма, м/мин
GpDp2 = J · 9,81 · 4
J – момент инерции двигателя
На третьем этапе производят проверку выбранного электродвигателя по пусковому режиму, используя зависимость:
Мmax>kз.м. (Мс.max + Мдин)([4] стр. 40 формула 1.59)
где Мmax – максимальный момент электродвигателя.
Мс.max – максимально возможный для данного кранового механизма момент статистической нагрузки, приведенный к валу электродвигателя, Н · м.
Мс.max = 9550 · 
Мдин – динамический момент, Н · м
Мдин = ![]() · а
· а
а – ускорение механизма ([4] стр. 41 таб. 14)
kз.м. – коэффициент запаса по моменту kз.м. = 1,1 ÷ 1,2
В тех случаях, когда предварительно выбранный электродвигатель не удовлетворяет условиям, выбирают из каталога ближайший больший по мощности и вновь проверяют правильность его выбора.
Расчет мощности двигателя подъема
Определим статистическую мощность на валу двигателя:
Рс.н. = 9,81 ∙  ∙ V ∙ 10
∙ V ∙ 10![]()
G – вес поднимаемого груза (кг)…………………………..….10000 кг
G![]() - вес захватного механизма (кг)………………………………..50 кг
- вес захватного механизма (кг)………………………………..50 кг
V – скорость вращения барабана (м/с)……………..…………...0,2 м/с
η – КПД механизма………………………………………………...0,8
Рс.н. = 9,81 ∙ ![]() ∙ 0,2 ∙ 10
∙ 0,2 ∙ 10![]() = 24,6 (кВт)
= 24,6 (кВт)
В соответствии с исходными данными по режиму работы и принятой системой электропривода находим значение коэффициента kт = 0,95 ([4] стр. 37 таб. 12).
kт – коэффициент, определяющий выбор двигателя по тепловому режиму.
Находим номинальную мощность двигателя по тепловому режиму предварительно.
Рп ≥([4] стр. 39 формула 1.56)
Рп = ![]() = 25,9 (кВт)
= 25,9 (кВт)
По литературе ([4] стр. 13 таб. 4) выбираем электродвигатель МЕF 412-6У1; Рн = 30 кВт; ПВ = 40%; Мmax = 932 Н∙м; cosφ = 0,71; Iн.с. = 75 А;
Iн.р. = 73 А; Uр = 255 В; J = 0,675 кг ∙ м![]() ; η = 85,5%.
; η = 85,5%.
Определим полный приведенный к валу двигателя маховый момент всех вращающихся и поступательно-движущихся масс привода и груза:
∑GD![]() = (GD
= (GD![]() )пр = k GpDp + 4
)пр = k GpDp + 4 ![]() ([4] стр. 26 формула 1.28)
([4] стр. 26 формула 1.28)
где k – поправочный коэффициент, в среднем 1,15
GpDp![]() - маховый момент ротора электродвигателя и всех других частей, вращающихся со скоростью ротора, Н ∙ м
- маховый момент ротора электродвигателя и всех других частей, вращающихся со скоростью ротора, Н ∙ м![]()
![]()
GpDp![]() = 4 ∙ 9,81 ∙ J
= 4 ∙ 9,81 ∙ J
J – момент инерции двигателя, кг ∙ м![]() ……………………………….0,675
……………………………….0,675
GpDp![]() = 4 ∙ 9,81 ∙ 0,675 = 26,487 Н ∙ м
= 4 ∙ 9,81 ∙ 0,675 = 26,487 Н ∙ м![]()
Q – грузоподъемность, кг ……………………………………….10000
V – скорость подъема м/мин……………………………………………..12
n – номинальные обороты двигателя, об/мин………………………….970
∑GD![]() = 1,15 ∙ 26,487 + 4 ∙
= 1,15 ∙ 26,487 + 4 ∙ ![]() = 36,6 Н м
= 36,6 Н м![]()
Проверим двигатель на обеспечение теплового режима
Рн ≥  ([4] стр. 39 формула 1.57)
([4] стр. 39 формула 1.57)
где kэкв, kз, Е![]() , Ер – расчетные коэффициенты, зависящие от режима работы и маховых масс ([4] стр. 39 таб. 13)
, Ер – расчетные коэффициенты, зависящие от режима работы и маховых масс ([4] стр. 39 таб. 13)
Е![]() = 0,4
= 0,4
kэкв = 0,8
Ер = 0,5
kз = 1
kн – коэффициент, равный единице для электроприводов переменного тока.
kд.п. – коэффициент, учитывающий степень включений динамических потерь на нагрев машины: 1,25 ([4] стр. 37 таб. 12)
ηэкв.б. – эквивалентный базисный КПД: 0,76 ([4] стр. 37 таб. 12)
kр – коэффициент, учитывающий увеличение потерь на регулировочных характеристиках.
kр = 1 – 1,2 (Ер – Ер.б.) ([4] стр. 40 формула 1.58)
Ер – относительная продолжительность включения при регулировании
Ер = 0,5 ([4] стр. 39 таб. 13)
kр = 1 – 1,2 (0,5 – 0,4) = 0,88
ηэкв. – эквивалентный КПД, является показателем энергетических свойств системы регулирования и определяющий потери энергии в электроприводе.
ηэкв.=  ([4] стр. 38 формула 1.55).
([4] стр. 38 формула 1.55).
где ηэкв. – значение эквивалентного КПД, соответствующее заданному числу включений в час Zэкв. ([4] стр. 38 рис. 5 гр. 4).
при Z = 240ηэкв.z. = 0,75
ηэкв.=  = 0,75
= 0,75
Рн.т. =  = 25,2 (кВт)
= 25,2 (кВт)
Рн ≥ Рн.т.
Похожие работы
... , замедление) и период движения с установившейся скоростью. Мостовой кран установлен в кузнечнопрессовом цеху машиностроительного производства, где наблюдается выделение пыли, поэтому электродвигатель и все электрооборудование мостового крана требует защиты общепромышленного исполнения не ниже IP 53 - защита электрооборудования от попадания пыли, а также полная защита обслуживающего персонала от ...
... швов при работе на: растяжение-сжатие: ; срез: ; Для угловых швов при работе на срез . 2.2 Расчётные комбинации нагрузок Расчётные комбинации нагрузок для металлоконструкций мостовых кранов приведены в табл. 6.13. [1, с. 116]. Определяем расчётные нагрузки комбинации. I.1.A. где I - прочность; - тележка в середине пролёта моста; - подъём груза. 2.3 Обоснование принятого веса ...
... = 0,1 м/с2 ( Рекомендуемое значение ). Wин = mпост*а = 1,25 * 39,43 * 0,05 = 2,46 кН. Сопротивление от раскачивания подвески : Wгиб = ( 160 + 8,57 ) 0,05 = 8,428 кН. Учитывая, что кран работает в помещении : W = 20,8 + 4,16 + 2,46 + 8,42 = 35,84 кН. Выбор двигателя. Предварительное значение к.п.д. механизма примем пред = 0,85. Из табличных значений = 1,6 – ...
... приемников электроэнергии, режимы их работы и размещении по территории цеха, номинальные токи и напряжения. Электромеханический цех (ЭМЦ) предназначен для подготовки заготовок из металла для электрических машин с последующей их обработкой различными способами. Он является одним из цехов металлургического завода, выплавляющего и обрабатывающего металл. ЭМЦ имеет станочное отделение, в котором ...
0 комментариев