Навигация
Консольный насос К 200-150-250/4-5
96103
знака
12
таблиц
8
изображений
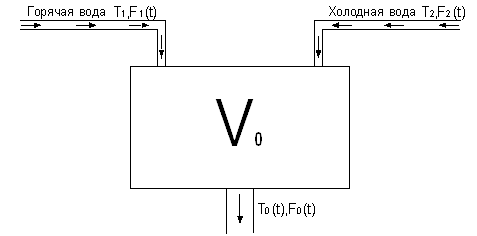
9.9 Консольный насос К 200-150-250/4-5
Консольный насос представляет собой, с точки зрения гидравлики, характерный тип центробежного насоса, рабочим органом которого является центробежное колесо.
Центробежное колесо состоит из двух дисков, между которыми, соединяя их в единую конструкцию, находятся лопасти, плавно изогнутые в сторону, противоположную направлению вращения колеса.
При вращении колеса на каждую частицу жидкости, находящуюся внутри колеса, действует центробежная сила, прямо пропорциональная расстоянию частицы от центра колеса и квадрату угловой скорости вращения колеса.
Под действием этой силы жидкость выбрасывается в напорный трубопровод из рабочего колеса, в результате чего в центре колеса создается разряжение, а переферийной его части - повышенное давление.
Движение жидкости по всасывающему трубопроводу происходит вследствие разности давлений над свободной поверхностью жидкости в приемном резервуаре и в центральной области колеса, где имеется разрежение.
В насосах типа К подвод крутящего момента от вала электродвигателя на вал насоса происходит через упругую муфту. В насосах типа КМ рабочее колесо установлено на конце удлиненного вала электродвигателя.
Назначение и технические характеристики насосных частей К и КМ идентичны, при этом насосные агрегаты типа КМ имеют меньшие габаритные размеры и массу.
Технические характеристики двигателя:
- мощность двигателя – 30 кВт;
- номинальная подача – 315 м3/ч;
- частота вращения – 1450 об/мин;
- номинальный напор – 20 м.
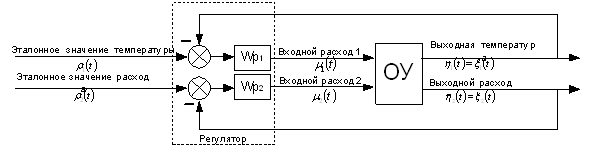
10. Выбор и описание контура регулирования
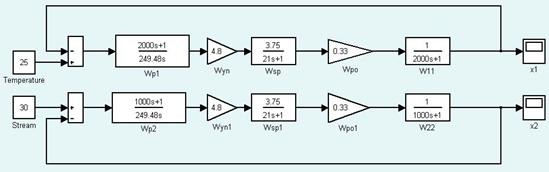
Схема используемого цифрового ПИД – регулятора представлена в соответствующем документе (структурная схема – на рисунке 10.1). На его вход подаются два сигнала: задающий, и сигнал обратной связи, приведенные к условному максимуму в 5 В. Для выделения ошибки, сигнал ОС предварительно инвертируется, после чего уже идет на сумматор. Ошибка проходит на три параллельно соединенных усилителя, отвечающих за отработку пропорционального, интегрального и дифференциального коэффициентов усиления.
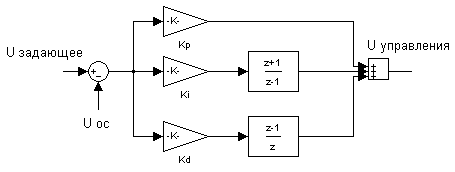
Рисунок 10.1 – Структурная схема цифрового ПИД – регулятора
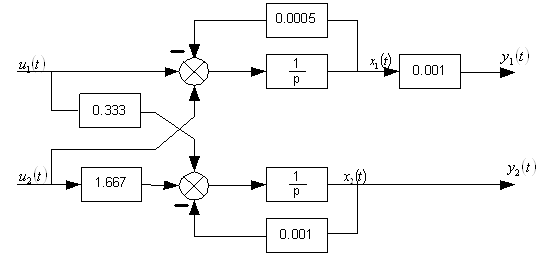
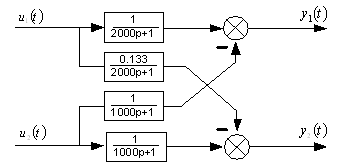
Для реализации схем задержек типа ![]() и
и ![]() используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).
используются развязки, изображенные на рисунке 10.2 (схемы соответствуют порядку следования передаточных функций в тексте).
В качестве звена задержки используется интегральная микросхема, позволяющая задерживать аналоговый сигнал, дискретный, представляемый в последовательном или параллельном виде. Микросхема также позволяет программно менять время задержки.
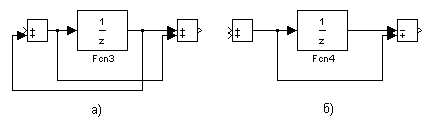
Рисунок 10.2 – Способы реализации передаточных функций звеньев задержки
Как видно, вся принципиальная схема строится на операционных усилителях (используются для реализации усилителей, сумматоров и инверторов), интегральных микросхемах задержки и резисторах.
На принципиальной электрической схеме также изображена схема дистанционного управления электроприводом регулирующего устройства (например, автоматического клапана, для отключения насосов от водопроводной сети).
Схема обеспечивает движение регулирующих устройств только во время подачи командных сигналов. Ограничение хода регулирующих устройств в конечных положениях обеспечивается соответствующими конечными выключателями.
Для предотвращения одновременного включения обеих катушек реверсивного магнитного пускателя, помимо механической блокировки, которой снабжен пускатель, в схеме предусмотрена электрическая блокировка с помощью размыкающих блок -контакторов ПМЗ и ПМО.
Электропривод снабжен потенциометрическим датчиком ПД, движок которого механически связан с редуктором привода. Датчик ПЛ подключается к устанавливаемому на щите управления блоку указателя положения БУП, состоящему из трансформатора питания, выпрямителей, подгоночного резистора и стрелочного прибора УП, шкала которого имеет градуировку 0 – 100%, пропорционально напряжению, снимаемому с потенциометрического датчика. Контакторы используются для отключения цепей управления при воздействии на привод ручным способом с помощью маховика.
11. Расчет параметров настройки контура регулирования
Поскольку вывод передаточной функции трехфазного двигателя достаточно громоздкий, предположим, что в погружных насосах скважин используются двигатели постоянного тока. Рассчитаем параметры цифрового ПИД - регулятора такого двигателя.
Двигатель постоянного тока как динамическая система описывается следующими уравнениями в операторной форме:
![]() , (11.1)
, (11.1)
где ![]() - напряжение питания двигателя;
- напряжение питания двигателя;
![]() - ток якоря;
- ток якоря;
![]() - активное сопротивление якоря;
- активное сопротивление якоря;
![]() - среднее значение ЭДС вращения;
- среднее значение ЭДС вращения;
![]() - индуктивность обмоток двигателя;
- индуктивность обмоток двигателя;
![]() - мощность двигателя.
- мощность двигателя.
![]() ,(11.2)
,(11.2)
![]() - коэффициент, зависящий от конструктивных параметров двигателя;
- коэффициент, зависящий от конструктивных параметров двигателя;
![]() - круговая частота вращения двигателя.
- круговая частота вращения двигателя.
Выражения для электромагнитного момента:
![]() ,(11.3)
,(11.3)
![]() ,(11.4)
,(11.4)
где ![]() - внешний момент, или момент нагрузки;
- внешний момент, или момент нагрузки;
![]() - момент инерции двигателя.
- момент инерции двигателя.
На основании этих уравнений может быть построена структурная схема двигателя как динамической системы (рисунок 11.1). Входным сигналом для этой системы является напряжение питания, выходным – круговая частота вращения двигателя. Дополнительное возмущение системы вноситься внешним моментом.
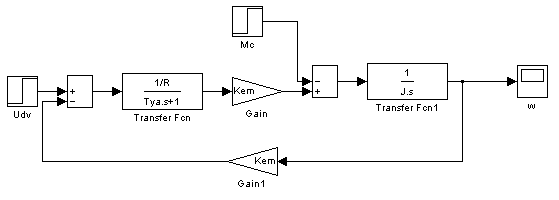
Рисунок 11.1 – Структурная схема двигателя
Из структурной схемы можно получить передаточные функции двигателя относительно круговой частоты вращения или тока:
![]() ,(11.5)
,(11.5)
 ,(11.6)
,(11.6)
где ![]() - коэффициент передачи;
- коэффициент передачи;
![]() - постоянная времени якоря;
- постоянная времени якоря;
![]() - электромеханическая постоянная времени.
- электромеханическая постоянная времени.
Рассчитаем коэффициенты цифрового ПИД - регулятора, управляющим пуском или остановом двигателя постоянного тока с конструктивными параметрами, аналогичными параметрам двигателя погружного насоса (таблица 11.1).
Таблица 11.1 – Паспортные данные двигателя постоянного тока
| Характеристика | Значение | ед. изм. |
| Номинальная мощность | 30 | кВт |
| Номинальное напряжение | 380 | В |
| Номинальный ток | 85 | А |
| Сопротивление обмотки якоря | 30 | Ом |
| Индуктивность обмотки якоря | 0,5 | Гн |
| Частота вращения | 152 | рад/с |
| Момент инерции | 0,3 | кг/см2 |
| Конструктивный параметр | 2,5 | Вс |
| Эм. постоянная времени | 6,5 |
Переход к передаточной функции приведенной непрерывной части двигателя осуществляется по следующей формуле:
![]() ,(11.7)
,(11.7)
где ![]() - исходная передаточная функция двигателя.
- исходная передаточная функция двигателя.
С учетом технических характеристик двигателя, его передаточные функции примут вид:
![]() ,(11.8)
,(11.8)
![]() .
.
Передаточная функция цифрового ПИД регулятора имеет следующий вид:
![]() ,(11.9)
,(11.9)
где ![]() - коэффициент усиления пропорциональной составляющей;
- коэффициент усиления пропорциональной составляющей;
![]() - коэффициент усиления интегральной составляющей;
- коэффициент усиления интегральной составляющей;
![]() - коэффициент усиления дифференциальной составляющей;
- коэффициент усиления дифференциальной составляющей;
![]() - период дискретизации (принимаем равным 0,2 с).
- период дискретизации (принимаем равным 0,2 с).
Интегральная составляющая определяется из следующего соотношения:
![]() ,(11.10)
,(11.10)
где ![]() - коэффициент добротности по скорости (выбирается произвольно в рамках от 1 до 10. В данном случае примем равным 1,2);
- коэффициент добротности по скорости (выбирается произвольно в рамках от 1 до 10. В данном случае примем равным 1,2);
![]() - передаточная функция скорректированной системы.
- передаточная функция скорректированной системы.
![]() ,(11.11)
,(11.11)
![]() .(11.12)
.(11.12)
Остальные коэффициенты усиления цифрового ПИД регулятора можно получить из следующей системы уравнений:
 , (11.13)
, (11.13)
где B и С – коэффициенты, выбираемые из ![]() .
.
Эта система, с учетом уже известных переменных может быть представлена в виде:
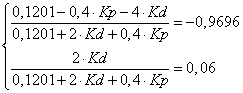 , (11.14)
, (11.14)
откуда получаем ![]() ,
,![]() . Переходные характеристики двигателя без регулятора и с ним, представлены на рисунке 11.2. Окончательные значения коэффициентов усиления цифрового ПИД регулятора сведены в таблицу 11.2.
. Переходные характеристики двигателя без регулятора и с ним, представлены на рисунке 11.2. Окончательные значения коэффициентов усиления цифрового ПИД регулятора сведены в таблицу 11.2.

Рисунок 11.2 – Переходные характеристики двигателя с регулятором и без
Таблица 11.2 – Значения коэффициентов цифрового ПИД регулятора
| Коэффициент | Обозначение | Рассчитанное знач. | Результирующее знач. |
| Пропорциональный | Kp | 19,3852 | 19,3852 |
| Интегральный | Ku | 3,0023 | 0,30023 |
| Дифференциальный | Kd | -0,56 | -2,8 |
Структурная схема цифрового ПИД регулятора содержит как минимум три усилителя (для реализации пропорционального, интегрального и дифференциального коэффициентов усиления), и два сумматора. Типовая схема усилителя представлена на рисунке 11.3, активные сопротивления резисторов – в таблице 11.3.

Рисунок 11.3 – Типовая схема усилителя
Коэффициент усиления можно рассчитать по следующей формуле:
![]() ,(11.15)
,(11.15)
здесь R3 используется для уменьшения дрейфа нуля, и принимается равным:
![]() .(11.16)
.(11.16)
Таблица 11.3 - Сопротивления резисторов усилителей
| Элемент | Коэффициент | Сопротивление (КОм) | В соответствии с рядом Е192 |
| R1 | Kp | 1 | 1 |
| R2 | Kp | 19,3852 | 19,3 |
| R3 | Kp | 0,95 | 0,96 |
| R1 | Ku | 1 | 1 |
| R2 | Ku | 0,3 | 0,301 |
| R3 | Ku | 0,231 | 0,232 |
| R1 | Kd | 1 | 1 |
| R2 | Kd | 2,8 | 2,8 |
| R3 | Kd | 0,736 | 0,732 |
Типовая схема сумматора представлена на рисунке 11.4. Его выходное напряжение можно рассчитать по следующей формуле:
![]() ,(11.17)
,(11.17)
если принять R1=R2=R3=Rос, то получим:
![]() .(11.18)
.(11.18)

Рисунок 11.4 – Типовая схема сумматора
12. Разработка АРМ
Требования к компьютеру связаны с большим объемом обрабатываемой информации и необходимостью представления информации графически. LAN связывает АРМ операторов и АРМ главных специалистов (Главный инженер, агроном, начальник службы).
Выбрав нужное отделение, оператор или другой пользователь системы имеет возможность переключиться на режим контроля. Оператор переключается на него после выбора необходимого ему отделения.
Журнал системных сообщений необходим при проведении повторных запусков системы, при ее настройке и наладке. Он позволяет отслеживать в режиме реального времени включение датчиков и других устройств системы, производить анализ отказов устройств и их диагностику.
Из окна журнала сообщений пользователь может распечатать все системные сообщения за указанный период времени.
Режим настройки системы параметров регулирования используется при проведении пусконаладочных работ, а также при проведении профилактической работы специалистами службы. Он позволяет учесть технологические особенности конкретных исполнительных устройств и устанавливать необходимые поправочные коэффициенты для улучшения качества регулирования. Вход в это окно доступен только для специалистов фирмы и для службы Заказчика.
Таким образом, основными достоинствами информационно-управляющего комплекса АСУКК ТХ являются:
уменьшение на 15-20% расхода тепло- и энергоносителей;
точность поддержания температуры воздуха в теплице ± 0,5°С;
поддержание оптимального микроклимата в теплице и увеличение возможности влияния на урожайность культивируемых культур;
высокая надежность;
возможность проведения замеров температуры и влажности возле контрольных растений.
Рекомендуется проводить поэтапную реконструкцию тепличных хозяйств. Это позволит уменьшить первоначальные затраты на проект. Первый этап - диспетчеризация. На этапе диспетчеризации собирается аналитическая и статистическая информация о работе теплицы. После окончания работ по диспетчеризации и анализа информации, полученной при работе с комплексом, выдаются рекомендации по "термодинамике" и гидродинамике в теплице. Это необходимо для обеспечения равномерного теплового поля в теплице и создания оптимальных условий роста растений. Второй этап - поэтапный переход на автоматический контроль и регулирование. Постепенный переход на автоматический контроль и регулирование позволит более гибко подходить к каждой конкретной теплице.
Заключение
В данном курсовом проекте была синтезирована двухуровневая АСУТП, которая осуществляет дискретное регулирование влажности воздуха и контроль расхода воды на распыление в теплице. По заданным параметрам ОУ путём моделирования были определены параметры настройки ПИ-регулятора, который обеспечивает необходимую точность регулирования и качество отработки входных воздействий (здесь – задание величины влажности). Используя алгоритмы первичной обработки, исследовалось влияние их параметров на характеристики сигнала с датчика влажности. Исходя из условия величины погрешности вычисления кода управления, были рассчитаны разрядности элементов ЦУУ (АЦП, ЦАП и АЛУ микроконтроллера) и произведен выбор комплекса технических средств.
Похожие работы
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...


... делать свой выбор в сторону социального блага, то есть в стьорону большей материальной и социальной защищенности со стороны работодателей. Раздел 3. Мероприятия по усовершенствованию системы управления персоналом предприятия 3.1. Усовершенствование состава и структуры персонала Анализ деятельности ЗАО ТМ «Змиевска овощная фабрика» обнаружил ряд негативных сторон в системе управления и ...
... УНИВЕРСИТЕТ ЭКОНОМИЧЕСКИЙ ФАКУЛЬТЕТ Кафедра экономики предприятий и предпринимательской деятельности Д И П Л О М Н А Я Р А Б О Т А На тему: Сертификация систем управления качеством продукции (на примере ВАСО) Специальность 061100 “Менеджмент” Вечернее отделениеЗав. кафедрой ...
... при крайне отсталой производственной базе легкой и пищевой промышленностей, гражданского машиностроения и сельского хозяйства. Каждая из этих проблем по своему осложняет интеграцию России в мировую экономику. Перестройка хозяйственного механизма закономерно сопровождается всплеском инфляции, нехваткой финансовых ресурсов, резким сужением платежеспособности населения многих предприятий. В итоге — ...
0 комментариев