Навигация
5 насосов;
Станция управления АСУР;
Центральный диспетчерский пункт;
Частотный преобразователь Micromaster 430 фирмы Siemins - коммутируется с одним из основных насосов;
программируемый логический микроконтроллер DeCont-182 фирмы ДЕП– собирает информацию с датчиков и управляет технологическим оборудованием и регулирует давление;
панель PanelView 550 фирмы Allen-Bradley – отображает текущие параметры системы, аварийные сообщения, предысторию событий, отчет по моточасам, осуществляет ввод команд оператора.
Режимы работы автоматизированной системы
Предусмотрено два режима работы насосов – диспетчерский и автоматический.
В диспетчерском режиме управление насосами сохранено от существующих контакторов и кнопок управления. В автоматическом режиме управление работой насосов и задвижек осуществляет микроконтроллер.
Регулирование давления воды в коллекторе в автоматическом режиме осуществляется одним из основных насосов. В зависимости от изменения сигнала с аналогового датчика, ЧРП меняет частоту вращения электродвигателя насоса. После раскрутки основного насоса до максимальных оборотов и при дальнейшем снижении давления, система через мягкий пускатель обеспечивает плавный, при минимальных пусковых токах и гидродинамических нагрузках, пуск дополнительного насоса. При этом, после включения дополнительного насоса, точная регулировка давления осуществляется основным насосом. При увеличении давления вследствии уменьшения разбора воды система производит отключение дополнительного насоса и понижает частоту вращения двигателя основного насоса до минимальных оборотов. Уставка давления в коллекторе изменяется автоматически в зависимости от времени суток. Определено три вида уставок: ночная, дневная, вечерняя. Кроме того, система поддерживает разные уставки давления в выходные и рабочие дни и осуществляет плавный переход с одной уставки на другую.
При неисправности насосов или задвижек, при максимальном или минимальном давлении на выкиде система автоматически останавливает аварийный насос, запускает резервный и продолжает работу на оставшемся исправном оборудовании до вмешательства оператора. Через панель PanelView оператор может изменять:
режим работы системы – автоматический/штатный;
готовность к пуску насосов – готов/не готов;
установки давления воды в коллекторе.
Внедрение АСУ в систему водоотведения позволяет:
-полностью автоматизировать работу объектов;
-уменьшить потребление
-электроэнергии;
-уменьшить потери, связанные с авариями;
-быстро реагировать на
-резкие изменения водопотребления;
-уменьшить расходы на обслуживание и поиск неисправностей;
-обеспечить дистанционную охрану объекта;
-обеспечить контроль давления;
-вести учет воды и электроэнергии;
-проводить анализ статистических данных.
Моделирование контура стабилизации
На выходном коллекторе системы необходимо регулировать выходное давление .Оно не должно превышать и падать , в следствии неравномерного расхода воды во времени ,ниже заданной величины.
Поэтому необходимо рассмотреть контур регулирования скорости двигателя в зависимости от выходного давления. Спроектированная система автоматической стабилизации давления может быть представлена структурной схемой, изображенной на следующем рисунке:
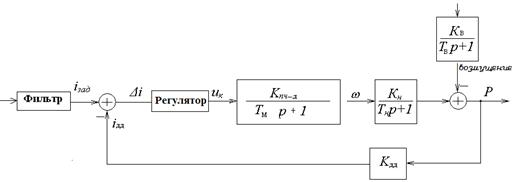
Рис. 1 Структурная схема.
iзад –сигнал задания давления;
P –давление в трубопроводе;
iдд –сигнал обратной связи с датчика давления;
Di – отклонение текущего значения от заданного;
uk – сигнал управления по напряжению на преобразователь частоты;
Kпч-д – коэффициент передачи преобразователя частоты-двигателя;
Tм – постоянная времени преобразователя частоты-двигателя;
w – скорость двигателя насоса;
Kн – коэффициент передачи насоса;
Tн – постоянная времени насоса;
Kдд – коэффициент передачи датчика давления.
KВ – коэффициент передачи возмущающего воздействия.
Каждый элемент системы представляет собой апериодическое звено.
Рассмотрим каждое звено отдельно:
Преобразователь частоты-двигатель:

![]()
![]() =0.01 - ввиду большой скорости срабатывания
=0.01 - ввиду большой скорости срабатывания
![]()
Насос. Преобразует циклическую частоту двигателя в давление

![]()
![]() =1 – время разгона насоса
=1 – время разгона насоса
![]()
Датчик давления. Преобразует давление в токовый сигнал.

![]()
Возмущающее воздействие.

![]()
![]()
Рассчитав перечисленные выше параметры звеньев структурной схемы, проведем моделирование в специализированном программном пакете визуального моделирования MatLab Simulink.
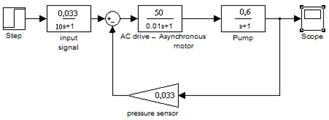

Рис. .Моделирование системы управления без регулятора и возмущающих воздействий в среде Simulink.
Далее проведём моделирование с внешним возмущающим воздействием при помощи открытия отсечного клапана.


Рис. Моделирование системы управления c возмущающим воздействием в среде Simulink
В момент открытия клапана происходит резкое падение давления, а затем система выходит на новое устойчивое состояние с меньшим значением давления.
Последним этапом является моделирование системы управления с регулятором давления, который должен компенсировать возмущающее воздействие.
Вычисление ПИ- регулятора
Объединяет два регулятора П и И, , обладает наилучшими свойствами, а именно: за счет П - составляющей улучшается показательные качества в переходном процессе, а за счет И - составляющей уменьшается ошибка регулирования ® т.е. улучшается точность.
В качестве критерия качества регулирования принимаем желаемую передаточную функцию разомкнутого контура. Для рассматриваемой системы регулирования целесообразно применять настройки контура регулирования на технический оптимум. Желаемую передаточную функцию разомкнутого контура в этом случае записывают в виде:
![]()
Передаточная функция оптимального регулятора определяется в виде:
![]()
где Wоу (p) – передаточная функция объекта регулирования, Wос (p) – передаточная функция звена обратной связи, Wр.жел (p) – желаемая передаточная функция разомкнутого контура.

В результате синтеза была получена передаточная функция ПИ-регулятора. В общем виде передаточная функция ПИ-регулятора выглядит следующим образом:

![]() ,
,
где KП – коэффициент пропорциональной части, КИ – коэффициент интегрирующей части, которые необходимо вычислить для построения регулятора в реальной системе регулирования давления.
Промоделируем систему с ПИ регулятором и возмущающими воздействиями.


Рис. Моделирование системы управления c возмущающими воздействиями и ПИ-регулятором в Simulink.
Вывод
По полученным результатам можно судить, что система быстро отрабатывает возмущение и возвращается в исходное устойчивое состояние с заданными показателями качества, поэтому синтез ПИ - регулятора проведён верно.
Список используемой литературы
1. Попкович Г. С., Гордеев М.А. Автоматизация системы водоснабжения и водоотведения. – М.: Высш. шк., 1986.
2.Певзнер Л. Д., Теория автоматического управления: Учеб. пособие. – М.: Высш. шк., 2006.
3. Певзнер Л. Д., Дмитриева В.В. Лабораторный практикум по дисциплине «Теория автоматического управления»: Учеб. пособие для студентов вузов. – М.: Изд-во МГГУ, 2007.
4. Рульнов А. А., Евстафьев К. Ю. Автоматизация систем водоснабжения и водоотведения. – М.: Инфра-М, 2010.
5. Жмаков Г. Н.. Эксплуатация оборудования и систем водоснабжения и водоотведения. – М.:Инфра-М, 2010.
6. Бородин И. Ф., Судник Ю. А.. Автоматизация технологических процессов. Учебник. – М.: КолосС, 2007.
Похожие работы
... предварительного сброса воды № 3 НГДУ «Мамонтовнефть» при максимальной пропускной способности оборудования На основании поверочного технологического расчета составлен материальный баланс установки предварительного сброса воды № 3 НГДУ «Мамонтовнефть» при максимальной пропускной способности оборудования по сырью табл. 12. Число рабочих дней в году 365. Таблица 12 Материальный баланс базовой ...
0 комментариев