Навигация
3. Состав.
В систему входят:
- Блок логики.
- Блок силовой.
- Внешние датчики
Блок силовой это совокупность исполнительных устройств, получающих команды от контроллера и управляющих насосом водоподъемной станции и другими силовыми элементами.
Внешние датчики:
• Датчик минимума-максимума (манометр)
• Датчик «сухого хода» (манометр)
• Дополнительно могут быть установлены датчики температуры, датчики охраны помещения и.т.п.
4. Возможности.
Режимы управления
• Автоматический
• Ручной
В автоматическом режиме, система контролирует все параметры и отрабатывает полный цикл, без вмешательства человека. Все действия и неисправности (аварийные ситуации) отображаются на жидкокристаллическом дисплее, который находится на передней панели устройства. Все данные отображаются с привязкой по времени. При использовании централизованного контроля и управления, все действия и неисправности транслируются в диспетчерский пункт и отображаются на экране персонального компьютера. Связь с компьютером может быть как проводная, так и беспроводная Wi Fi. По одной паре проводов, последовательно может быть подключено до 255 устройств.
В ручном режиме все операции производятся с помощью органов управления, находящихся на передней панели.
По желанию система может комплектоваться устройством плавного пуска двигателя, что значительно увеличивает срок службы насоса.
2.2 Математическое описание ОУ
На станции 3-го подъёма необходимо регулировать выходное давление. Оно не должно превышать и падать , вследствии неравномерного расхода воды во времени ,ниже заданной величины.
Поэтому необходимо рассмотреть контур регулирования скорости двигателя в зависимости от выходного давления. Спроектированная система автоматического регулирования давления может быть представлена структурной схемой, изображенной на следующем рисунке.
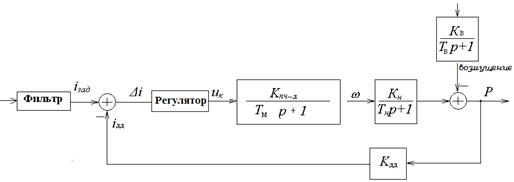
Рис. Структурная схема
iзад –сигнал задания давления;
P –давление в трубопроводе;
iдд –сигнал обратной связи с датчика давления;
Di – отклонение текущего значения от заданного;
uk – сигнал управления по напряжению на преобразователь частоты;
Kпч-д – коэффициент передачи преобразователя частоты-двигателя;
Tм – постоянная времени преобразователя частоты-двигателя;
w – скорость двигателя насоса;
Kн – коэффициент передачи насоса;
Tн – постоянная времени насоса;
Kдд – коэффициент передачи датчика давления.
KВ – коэффициент передачи возмущающего воздействия.
Каждый элемент системы представляет собой апериодическое звено.
Рассмотрим каждое звено отдельно:
1. Преобразователь частоты-двигатель:
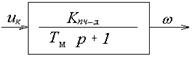
![]()
![]() =0.01 ввиду большой скорости срабатывания
=0.01 ввиду большой скорости срабатывания
![]()
2. Насос. Преобразует циклическую частоту двигателя в давление
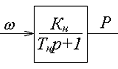
![]()
![]() =1 – время разгона насоса
=1 – время разгона насоса
![]()
3. Датчик давления. Преобразует давление в токовый сигнал.
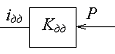
![]()
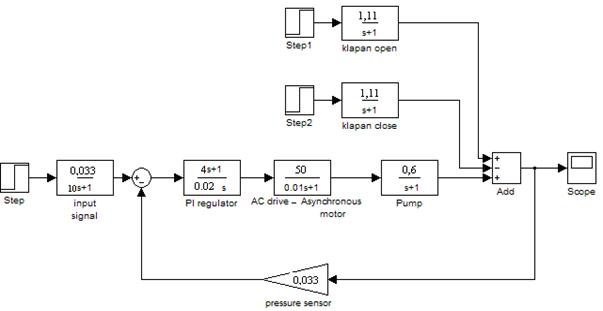
4. Возмущающее воздействие.
![]()
![]()
Рассчитав перечисленные выше параметры звеньев структурной схемы, проведем моделирование в специализированном программном пакете визуального моделирования MatLab Simulink.

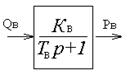
Моделирование системы управления без регулятора и возмущающих воздействий в среде Simulink
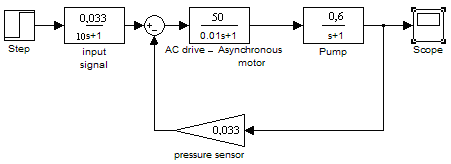
Далее проведём моделирование с внешним возмущающим воздействием при помощи открытия отсечного клапана.

Моделирование системы управления c возмущающим воздействием в среде Simulink
В момент открытия клапана происходит резкое падение давления, а затем система выходит на новое устойчивое состояние с меньшим значением давления.
Последним этапом является моделирование системы управления с регулятором давления, который должен компенсировать возмущающее воздействие.
Вычисление ПИ- регулятора
Объединяет два регулятора П и И, , обладает наилучшими свойствами, а именно: за счет П - составляющей улучшается показательные качества в переходном процессе, а за счет И - составляющей уменьшается ошибка регулирования ® т.е. улучшается точность.
В качестве критерия качества регулирования принимаем желаемую передаточную функцию разомкнутого контура. Для рассматриваемой системы регулирования целесообразно применять настройки контура регулирования на технический оптимум. Желаемую передаточную функцию разомкнутого контура в этом случае записывают в виде:
![]()
Передаточная функция оптимального регулятора определяется в виде:
![]()
где Wоу (p) – передаточная функция объекта регулирования, Wос (p) – передаточная функция звена обратной связи, Wр.жел (p) – желаемая передаточная функция разомкнутого контура.

В результате синтеза была получена передаточная функция ПИ-регулятора. В общем виде передаточная функция ПИ-регулятора выглядит следующим образом:

![]() ,
,
где KП – коэффициент пропорциональной части, КИ – коэффициент интегрирующей части, которые необходимо вычислить для построения регулятора в реальной системе регулирования давления.
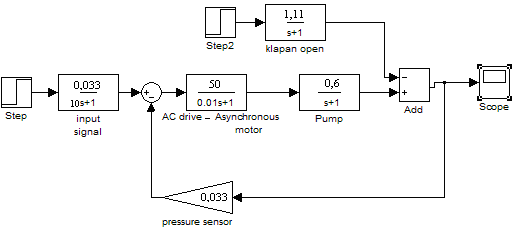
Промоделируем систему с ПИ регулятором и возмущающими воздействиями.

Моделирование системы управления c возмущающими воздействиями и ПИ-регулятором в Simulink
По полученным результатам можно судить, что система быстро отрабатывает возмущение и возвращается в исходное устойчивое состояние с заданными показателями качества, поэтому синтез ПИ - регулятора проведён верно.
3 Предложения по автоматизации насосной станции
Наиболее экономичным является такой режим работы насосов, когда при изменяющемся разборе развиваемый насосами напор соответствовал бы минимально необходимому значению и не превышал его. Этого можно добиться путем автоматического изменения частоты вращения электродвигателей насосов с помощью частотно-регулируемых приводов (ЧРП).
Таким образом, основной целью создания автоматизированной системы управления стало:
· автоматическое поддержание заданного давления воды в коллекторе;
· создание наиболее экономичного режима работы насосов с помощью ЧРП;
· оперативный диспетчерский контроль за параметрами процесса;
· выявление аварийных ситуаций и/или неисправностей технологического оборудования с выдачей аварийно-предупредительной сигнализации и с занесением в журнал событий.
· обработка аналоговой и дискретной информации по заданному алгоритму и формирование qнеобходимых сигналов для управления технологическим оборудованием;
· передача информации о текущем состоянии оборудования, о параметрах и состоянии технологического процесса на верхний уровень (при работе в составе АСУ ТП предприятия);
Похожие работы
... реферата, в связи с вышеизложенными фактами, является попытка составить краткую характеристику чрезвычайных ситуаций антропогенного происхождения, связанных с промышленными выбросами в окружающую среду на территории Нижегородской области. Кроме текстовой информации даётся большое число таблиц и графиков для более наглядного представления экологической обстановки в городе. Город Нижний Новгород ...
... и решением вопросов правильного расположения транспортных путей вблизи бровок, за пределами призмы обрушения. Глава 11. Экономика. 11.1. Исходные показатели при проектировании водоснабжения города и промышленных предприятий. 1. Суточная производительность системы, 42421 м3/сут. 2. Перечень сооружений, запроектированных для подъема и очистки воды: - водозаборные сооружения ...
... ( Невский завод на Неве ,завод на Свири ,Нарвский завод, ,Лужский завод ,Волховский завод ,Приозерский завод в Моторном ) 2. форелевые( в Лопухинке ,на озере Суходольском ,на озере Бородинское и т.д. ) Отчет о посещении водозаборной станции поселка Разлив Одиннадцатого июля наша группа посетила водозаборные сооружения в поселке Разлив . Первое впечатление от этой водозаборной станции осталось ...
... подземных вод каменноугольных отложений чрезвычайно разнообразны. Поэтому глубины трубчатых колодцев, конструкция фильтров и оборудование варьируется в широких пределах. По условиям залегания водоносных горизонтов, по качеству вод территорию области можно разделить на семь гидрогеологических районов. 1. Южный район имеет трубчатые колодцы, питающиеся водами серпуховской и окской свит ...
0 комментариев