Выписываем в графу 8 таблицы 6 значения вторичных поправок и вычисляем окончательные (уравновешенные) значения углов (графа 9 таблица 6)
Оцениваем качество измерений, вычислив для этого невязки по ходам: по первому - вместе со вторым и по второму - вместе с третьим
Подсчитываем алгебраические суммы чисел, а таблицу поправок и записываем их над двойной чертой
Навигация
Выписываем в графу 8 таблицы 6 значения вторичных поправок и вычисляем окончательные (уравновешенные) значения углов (графа 9 таблица 6)
Уравновешивание геодезических сетей сгущения и систем ходов плановой съемочной сети
43267
знаков
22
таблицы
7
изображений
1.2.2.14. Выписываем в графу 8 таблицы 6 значения вторичных поправок и вычисляем окончательные (уравновешенные) значения углов (графа 9 таблица 6).
Выполняем контроль вычислений: сумма уравновешенных углов в треугольнике должна быть равна 180°.
1.2.2.15. Выбираем из таблицы (получаем на калькуляторе), значения синусов уравновешенных углов, выписываем их в графу 10 таблица 6 и на основании исходной стороны по теореме синусов (см. предварительное решение треугольников) вычисляем все стороны треугольников системы.
Контролем является то, что вычисленное значение исходной стороны должно отличатся от ее заданного не более, чем на 3 см.
1.2.2.16. На схеме (рисунок 1) наметить: «ходовую» линию через определяемые пункты «Луговое», «Свобода», «Пригородное», «Аграрное». Выписать в таблицу 9: а) графы 3, 4, 5, б, 7, 8 - названия определяемых пунктов, б) графу 3 - исходные данные αисх , x1 , y1 ; в) в графы 4, 5, 6, 7 - углы поворота β или λ, и длины сторон S (по данным таблицы 6).
1.2.2.18. По известным формулам:
ai =ai-1+180˚-βi (19), ai =ai-1-180˚+λi (20)
определяем дирекционные углы «ходовой» линии по дирекционному углу исходной линия αисх и углом поворота βi или λi Контролем вычислений ai будет являться aисх (графа 8, таблица 9). Переходим от дирекционных углов к румбам.
1.2.2.19. Вычисляем для каждой ходовой линии приращения координат по известным формулам: Δxi=dicosri (19), Δyi=disinri (20).
При вычислениях функции синусов и косинусов брать до 6-го знака после запятой. Приращения координат округлить до 2-го знака.
1.2.2.20. Определяем последовательно координаты определяемых пунктов по формулам:
x2=x1+∆x1-2
и
y2=y1+∆y1-2 (22)
где x 1 ,y1 и x2,y2 координаты соответственно исходного и определяемого пунктов.
Контролем вычислений координат будет: координаты исходного пункта «Марьино», полученные в результате вычислений (графа б, таблица 9), не должны отличатся от них заданного значения (графа 3) более 3 см.
Таблица 9
Вычисление координат пунктов сети.
| Порядок действий | Обозначения | Названия пунктов: 1 исходных ; 2 определяемых | |||||
| Марьино Луговое | Луговое Свобода | СвободаПригородное | ПригородноеАграрное | Аграрное Марьино | Марьино Луговое | ||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| I | αисх | 72 º28'50'' | 72 º28'50'' | 311 º52'45'' | 101 º19'11'' | 185 º24'21'' | 281 º12'25'' |
| 5 | β | ─ | 59 º23'55'' | 30 º33'34'' | 95 º54'50''59 º23'58''59 º23'58'' | 84 º11'56'' | 28 º43'35'' |
| 6 | Α1-2 | 72 º28'50'' | 311 º52'45'' | 101 º19'11'' | 185 º24'21'' | 281 º12'25'' | 72 º28'50'' |
| 7 | R1-2xx | 72 º28'50'' | 48 º07'15'' | 78 º40'49'' | 5 º24'21'' | 78 º47'35'' | |
| 12 | X2 | 5536,34 | 7357,49 | 6703,78 | 4474,41 | 5008,50 | 5008,50 |
| 2 | X1 | 5008,50 | 5536,34 | 7357,49 | 6703,78 | 4474,41 | |
| 11 | ∆x1-2 | 527,84 | 1821,15 | -653,71 | -2229,37 | 534,09 | |
| 8 | Cos r1-2S | 0,301029 | 0,667562 | 0,196284 | 0,995552 | 0,194353 | |
| 4 | S1-2sin | 1753,45 | 2728,06 | 3330,44 | 2239,33 | 2748,030,980932 | 1753,45 |
| 19 | Sin r1-2 | 0,953615 | 0,744554 | 0,980547 | 0,094210 | 0,980932 | |
| 10 | ∆y1-2yY1 | 1672,12 | -2031,19 | 3265,65 | -210,97 | -2695,63 | |
| 3 | Y1 | 1000,00 | 2672,12 | 640,93 | 3906,58 | 3695,61 | 999,98 |
| 13 | Y2 | 2672,12 | 640,93 | 3906,58 | 3695,61 | 999,98 | |
1.2.2.21. Выписываем координаты исходных пунктов из таблицы 9 в каталог координат (таблица 10), а также дирекционные углы направлений на один или два смежных пункта и расстояния до них. В камлоте координат дается также характеристика типа знака, центра и указывается класс исполненной ости.
Как ответственный документ каталог заполняется, считается и подписывается двумя исполнителями.
Таблица 10
Каталог координат пунктов триангуляции 2 разряда (местная система координат).
| № № п. п. | Название пункта тип и высота знака тип центра | Разряд | Координаты Х , м У, м | Длина сторон | Дирекционные углы | На пункт |
| 1 | Свобода пир.6,2м центр 2 типа | 2 | 7357,49 640,93 | 3330,44 2728,06 2376,28 | 101 º19'11'' 131 º52'45'' 171 º18'32'' | Пригородное Луговое Марьино |
| 2 | Пригородное пир.6,8м центр 2 типа | 2 | 6703,78 3906,32 | 2239,33 1699,06 3330,44 | 185 º24'21'' 226 º35'54'' 281 º12'25'' | Аграрное Луговое Свобода |
| 3 | Аграрное пвр,6,5м центр 2 типа | 2 | 4474,41 3695,61 | 2239,33 2748,03 | 5 º24'21'' 281 º12'25'' | Пригородное Марьино |
| 4 | Луговое пир.6,3м центр 2 типа | 2 | 5536,34 2672,12 | 1753,45 2728,06 | 252 º28'50'' 311 º52'45'' | Марьино Свобода |
| 5 | Марьино пир 6,6м центр 2 типа | 1 | 5008,50 1000,00 | 1753,45 2748,03 2376,28 | 72 º28'50'' 101 º12'25'' 351 º18'32'' | Луговое Аграрное Свобода |
2. Уравновешивание систем ходов плановой съемочной сети
2.1 Уравновешивание систем теодолитных ходов с одной узловой точкой
2.1.1 Задание
Произвести уравновешивание систем теодолитных ходов, сходящихся в узловой точке 3 и опирающихся на линии геодезической сети АВ, СD, ЕF с известными дирекционными углами на пункты В, D и F с известными координатами.
Схема ходов и значения измеренных углов и длин линий приведены на рисунке 5.
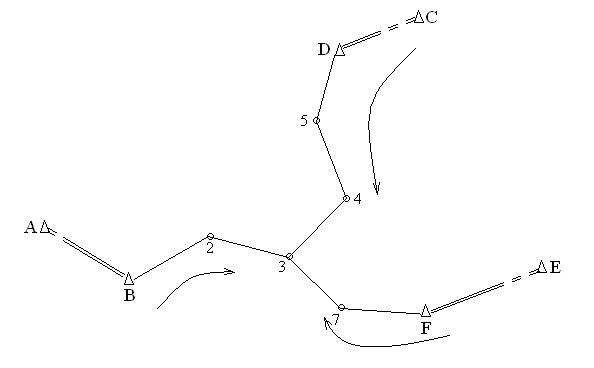
Рис.5 Схема ходов
Таблица 11
Исходные данные.
| № №варианта | Координаты пунктов | Дирекционные углы | |||||||
| В | D | F | αAB | αCD | αEF | ||||
| Х | У | Х | У | X | Y | ||||
| 8 | 2434,45 | 4508,48 | 2148,82 | 3282,66 | 3436,02 | 4074,02 | 304° 15,4' | 52° 38,7' | 108° 44,1' |
Вычисления всех дирекционных углов выполнить с округлением до 0,1'. Приращение координат и координаты вычислить с округлением до 0,01м.
В результате уравнивания сети ходов должны быть представлены:
1. Схематический чертеж (рис. 5)
2. Ведомость вычисления координат (таблица 12).
3. Таблица вычислений окончательных значений дирекционного угла узловой линии (таблица 13).
4. Таблица вычислений окончательных значений координат узловой точки (таблица 14).
2.1.2 Порядок решения
2.1.2.1. По схеме намечаем узловую линию, например линию 2-3. Выписываем в ведомость координат (таблица 12) измеренные углы (графа 2) и дирекционные углы твердых линий (графа 4). Подсчитываем суммы измеренных углов по каждому из ходов.
2.1.2.2. По всем трем ходам вычисляем дирекционный угол узловой линии и результаты записываем в графу 2 таблицы 13, а в графу 4 записываем число углов по каждому ходу.
2.1.2.3. Оцениваем качество угловых измерений, составив для этого разности вычисленных для узловой линии дирекционных углов. Первую разность составляем из дирекционных углов, найденных по двум ходам с наименьшим числом углов. Полученная разность равна угловой невязке этих двух ходов. Сравнить эту разность с допустимой невязкой определяемой по формуле:
![]() (23)
(23)
где ![]() - число углов в обоих ходах.
- число углов в обоих ходах.
Другую разность составляем из дирекционных углов, вычисленных по третьему ходу и одному из двух первых. Эту невязку также сравнивают с предельной, определяемой по формуле (23). Результаты вычислений записываем в графу 9 таблицы 13.
Таблица 12
Ведомость вычисления координат.
| № точек | Углы | Горизонтальное проложение | Приращения координат | Координаты | ||||||
| измер. | исправл. | дирекц. | вычисленные | исправленные | ||||||
| ∆x | ∆y | ∆х | ∆y | х | y | |||||
| 1 | 2 | 3 , | 4 | 5 | б | 7 | 8 | 9 | 10 | 11 |
| A | (левые) | 304° 15,4' | 1-й ход | |||||||
| B | 155°17.5' | 155° 17.5' | 279°32.9' | 200,42 | -233,25 | -4-197,64 | +33,23 | -197,68 | 2434,45 | 4508,48 |
| 2 | -0.1'223°43.0' | 223° 42.9' | 323°15,8' | 322,34 | -2258,32 | -5+192,80 | 258,30 | -192,85 | 2467,68 | 4310,80 |
| 3 | 2725,98 | 4117,95 | ||||||||
![]() 379°00,5’ P= 522,76
379°00,5’ P= 522,76 ![]() 291,57
291,57 ![]() -390,44
-390,44
![]() 379°00,4’
379°00,4’ ![]() 291,53
291,53 ![]() 390,53
390,53
![]() +0,1’ fх=0,04 fу=0,09
+0,1’ fх=0,04 fу=0,09
![]() 1.4’ fабс=0,01 fотн=0,01/523=1/52300
1.4’ fабс=0,01 fотн=0,01/523=1/52300
| 1 | 2 | 3 | 4 | 5 | б | 7 | 8 | 9 | 10 | 11 |
| C | (правые) | 52°38,7' | ||||||||
| D | -0.2'187°20,5' | 187° 20.3' | 45°18.4' | 439.44 | +4309.06 | -3312,39 | +309,10 | 312,36 | 2148,82 | 3282,66 |
| 5 | -0.1'187° 35,5' | 187° 35,4' | 37°43,0' | 292.83 | +5231,64 | -3179,14 | +231,69 | 179,11 | 2457,92 | 3595,02 |
| 4 | -02'133° 45,0' | 133° 44.8' | 83°58.2' | 345.76 | +536.32 | -3343,85 | 36,37 | 343,82 | 2689,61 | 3774,13 |
| 3 | -0.1'120° 42,5' | 120° 42.4' | 143°15.8' | 2725,98 | 4117,95 |
![]() 629°23.5' P=1078.03
629°23.5' P=1078.03 ![]() 577,02
577,02 ![]() 835,38
835,38
![]() 629°22.9'
629°22.9' ![]() 577,16
577,16 ![]() 835,29
835,29
![]()
![]() +0.6' fх= -0,14 fу=0,09
+0.6' fх= -0,14 fу=0,09
![]() 2,0' fабс=0,17 fотн=0,17/1078= 1/6000
2,0' fабс=0,17 fотн=0,17/1078= 1/6000
| 1 | 2 | 3 | 4 | 5 | б | 7 | 8 | 9 | 10 | 11 |
| E | (правые) | 108°44.1' | ||||||||
| F | +0,1'153°20.5' | 153°20.6 | 135°23,5' | 335.45 | -2-238,81 | +12235,57 | -238,83 | 235,69 | 3436,02 | 4074,02 |
| 7 | +0,1'113°14.0 | 113°14.1 | 202°09.4' | 508.76 | -2-471,19 | +11-191,87 | -471,21 | -191,76 | 3197,19 | 4309,71 |
| 3 | +0,1'238°53.5 | 238°53.6 | 143°15.8' | 2725,98 | 4117,95 |
![]() 505°28,0' P=844,21
505°28,0' P=844,21 ![]() -710,00
-710,00 ![]() 43,70
43,70
![]() 505°28,3'
505°28,3' ![]() -710,04
-710,04 ![]() 43,93
43,93
![]()
![]() - 0,3' fх= +0,4 fу= -0,23
- 0,3' fх= +0,4 fу= -0,23
![]() 1,6' fабс=0,23 fотн=0,23/844= 1/3700
1,6' fабс=0,23 fотн=0,23/844= 1/3700
2.1.2.4. Определяем веса вычисленных значений дирекционного угла узловой линии по формуле:

где ni - число углов в i - м ходе,
k - произвольный коэффициент, выбираемый так, чтобы веса выражались числами близкими к единице. Найденные веса записываем в графу 5 таблицу 13 с округлением до 0,01.
Таблица 13
Вычисление окончательного значения α2-3
| № ходов | Дирекционные углы | εi | Числоуглов |
| PE | Невязкиfβ | pfβ | проверкадопустимостиугловых.невязок |
| 1 | 2 | 3 | 4 | 5 | б | 7 | 8 | 9 |
| 1 | 143°15.9' | +0.7 | 2 | 6 | 4.2 | -0.1 | +0.6 | fβ1-3=α3-α1=+0,2'fβдоп=1'√(n1+n3)=1'√5≈2.2'fβ2-3=α3-α2=+0,9'fβдоп=1'√(n2+n3)=1'√5≈2.6' |
| 2 | 143°15.2' | 0 | 4 | 3 | 0 | +0.6 | -1.8 | |
| 3 | 143°16.1' | +0.9 | 3 | 4 | 3.6 | -0.3 | +1.2 |
a0= 143°15.2’ [PE]=+7.8 [P]=13 [Pfβ]=0
а=143°15,8'
Контроль: ω[P]= 0
2.1.2.5. По формулам общей арифметической средины:

где α0- приближенное значение искомого дирекционного угла, ε1 - остаток, определяемый по формуле: ![]() (i=1,2,3) (26), вычислить окончательное значение дирекционного угла α.
(i=1,2,3) (26), вычислить окончательное значение дирекционного угла α.
2.1.2.6. Вычисляем угловые невязки ходом для правых углов по формуле:
![]() (27),
(27),
для левых углов по формуле:
![]() (28)
(28)
Полученные значения невязок записать в графу 7 таблицы 13. Выполнить контроль вычисления невязок по формуле: [pfβ] =0
Вследствие ошибок округлений это равенство может не выполняться.
В этом случае [pfβ]=ω[P] (30), ![]() где ω- ошибка округления при делении [ Pε ] на [ p ].
где ω- ошибка округления при делении [ Pε ] на [ p ].
2.1.2.7. Полученное окончательное значение дирекционного угла α узловой линии в дальнейшем принимают за твердое и записывают в графу 4 таблицы 12. Затем вычисляют теоретические суммы углов по каждому ходу по формулам:
• для правых углов
![]()
• для левых углов
![]()
где αн и αк - начальный и конечный углы хода, найти угловые невязки и сличить их с полученными в графе 7 таблица 12, учитывая, что невязки для правых и левых углов одного и того же хода противоположны по знаку (ход 1).
Если полученные невязки меньше предельных, то распределим их с противоположным знаком поровну на углы соответствующих ходов (с округлением до 0,1').
2.1.2.8.Вычисляем дирекционные углы по формулам:
• для правых углов: α1=αi-1+180˚-βi (33)
• для левых углов: α1=αi-1+180˚-λi
Таблица 14
Вычисление окончательных значений координат узловой точки 3.
| №№хода | X,м | εx`см | Pεx`см | fx`см | Pfx`см | Sкм |
k=4 | Pfy`см | fy`см | Pεy`см | εx`см | Y,м |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 1 | 2726,02 | 0,18 | 1,44 | +0.04 | +0.32 | 0.5 | 8 | +0.72 | +0.07 | +2,56 | +0,32 | 4118,04 |
| 2 | 2725,84 | 0,18 | 0 | -0.14 | -0.56 | 1.0 | 4 | 0 | 0,36 | +1,28 | +0,32 | 4118,04 |
| 3 | 2726,02 | +0.2 | +0,9 | +0.04 | +0.20 | 0.8 | 5 | -0.6 | -0,23 | 0 | 0 | 4117,72 |
X0 = 2725,84 [pεx]= 2.34 [pfx]= -0,04 [p]= 17
y0=4402.09 [pfy]= +0,07 [pεy]= -3,84
X= 2725,98 y=4117,95
Контроль: ωx[p]=0,06 ωy[p]= 0,05
2.1.2.9. Вычисляем приращения координат и их суммы (см. таблицу 12), а затем - координаты узловой точки по всем трем хода. Результаты вычислений записать в графы 2 и 13 таблицы 14.
Проверка допустимости линейных невязок
| №№ ходов | Si+j м | Fx=xi-xj | Fy=yi-yj | fабс | Fотн м |
| 1 | 2 | 3 | 4 | 5 | 6 |
| 1+2 | 1600 | +0.18 | 0 | +0.18 | 1:8900 |
| 2+3 | 1923 | -0.18 | +0.32 | +0.37 | 1:5200 |
Похожие работы
... по формуле: ¦x=åDx-(xк-xн); ¦y=åDy-(yк-yн) сумма поправок приращений должна равнятся нулю. dxBC+dxCD+dXDE+¦x=0 dyBC+dyCD+dyDE+¦=0 4. Упрощенное уравнивание центральной системы. В центральной системе возникает условное уравнение фигур, горизонта и полюса. Математически эти условия выражаются уравнениями поправок. Число условных уравнений фигур ...
0 комментариев