Навигация
Подача возбуждения в обмотку ротора
32347
знаков
0
таблиц
30
изображений
2. Подача возбуждения в обмотку ротора.
3. Синхронизация с сетью.
Разгон до подсинхронной скорости может осуществляться за счет внешнего крутящего момента (генератор в двигательном режиме в системе Г- СД) или с помощью пусковой короткозамкнутой обмотки, заложенной в ротор СД. В зависимости от мощности питающей сети, так же, как и в АД, применяются пуски при полном и пониженным напряжениях с использованием резисторов, реакторов и автотрансформаторов (схема 13).
Подача напряжения возбуждения на обмотку ротора СД производится от возбудителя, расположенного на одном валу с СД, или полупроводникового выпрямителя. В зависимости от момента подачи полного напряжения на статор СД в сочетании с подачей возбуждения в роторную обмотку СД различают три вида пуска СД: прямой, тяжелый и легкий.
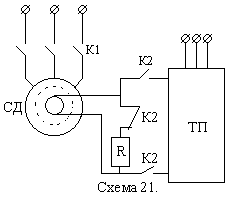
При прямом пуске на обмотку статора подается полное напряжение сети, а ОВ СД подключается наглухо (без разрыва) к якорю возбудителя (схема 19).
Прямой пуск с глухоподключенным возбудителем возможен при наличии трех условий:
· если позволяет мощность питающей сети;
· если время разгона до подсинхронной скорости меньше времени самовозбуждения возбудителя, чтобы подача тока возбуждения в ротор происходила после достижения подсинхронной скорости;
· если момент статического сопротивления на валу не превышает 40% Мном СД, что гарантирует разбег СД без застревания на половине синхронной скорости (в этом месте механической характеристики СД провал момента).

Синхронизация СД с сетью обычно происходит автоматически при подсинхронной скорости и подаче возбуждения (рис. 6.15- а).
Если при пуске время разбега СД превышает время самовозбуждения возбудителя при Мс > 0,4 Мн, то применяют прямой пуск с разрядным резистором R в цепи ОВ СД (рис. 6.15- б), который отключается при разбеге СД до подсинхронной скорости. При питании ОВ СД от ТП (тиристорного преобразователя) также включает разрядный резистор R (рис. 6.15- в). Разрядный резистор ограничивает ток возбуждения при пуске, улучшая этим механическую характеристику СД, и обеспечивает ускоренное гашение поля СД после его отключения от сети.
R = (8 ¸ 10)Rр,
где Rр- сопротивление ОВ СД.
Легкий и тяжелый пуск производится со сниженным напряжением питания статорной обмотки СД.
При легком пуске напряжение возбуждения подается еще при пониженном напряжении питания. Применяют при малых Мс (момент статического сопротивления на валу).
При тяжелом пуске напряжение возбуждения подается при полном напряжении на обмотке статора (при больших Мс).
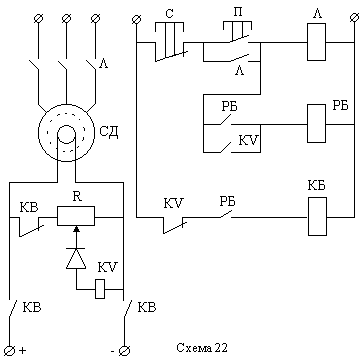
Управление моментом подачи возбуждения возможно в функции скорости или тока. При управлении с контролем скорости используется узел (рис. 6.16). Реле времени электромагнитного типа КV (РЭВ 880) с гильзой для замедления спадания магнитного потока запитано пульсирующим напряжением через диод VД на часть разрядного сопротивления R. В момент пуска КV включается, а по мере разгона СД амплитуда и частота импульсов напряжения на катушке КV снижается. При подсинхронной скорости реле КV отключится и своими нормально замкнутыми контактами включит контактор КВ, который подаст полное напряжение на ОВ СД. Это происходит при правильном включении диода, когда ось северного полюса ротора опережает ось южного полюса поля статора примерно на 15- 30°.
При управлении с контролем тока используют узел рис. 6.17.
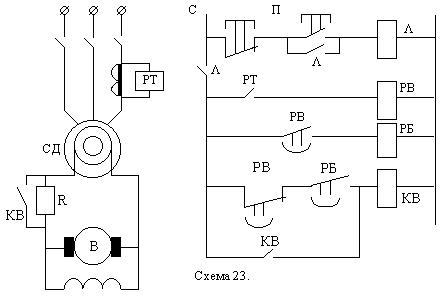
Реле пускового тока РТ включается при пуске и отпускается при спадании пускового тока, отключая РВ. Реле времени электромагнитного типа РВ дает дополнительную задержку времени включения контактора КВ. Блокировочное реле РБ также представляет собой электромагнитное реле времени и является вспомогательным для управления контактором КВ. После включения контактор КВ становится на самопитание. Такое управление в функции тока чаще используют при прямых пусках СД.
Тяжелый пуск СД (рис.6.18).

В схеме используются типовые узлы:
- автотрансформаторный асинхронный пуск в функции времени (под контролем маятникового реле времени в контакторе ускорения У);
- управление моментом подачи возбуждения СД в функции скорости (работа узла аналогична схеме рис. 6.16);
- узел защиты СД от затяжного пуска (контроль времени пуска маятниковым реле времени в контакторе L).
Работа схемы при пуске СД:
В исходном состоянии все аппараты обесточены. Нормально замкнутые контакты маятниковых реле времени включены в цепь питания катушки вспомогательного реле Б. При нажатии кнопки П включается реле Б, которое включает контактор У. Собирается схема автотрансформаторного пуска СД, который протекает под контролем маятникового реле времени в контакторе У, по истечении выдержки времени которого отключается реле Р и следом за ним - контактор У. Через нормально замкнутые контакты У и Б и нормально разомкнутые контакты КV, которое в начале пуска включилось, включается контактор L, подается полное напряжение сети к СД, а блок-контактами L шунтируются контакты КV и подготавливается цепь включения контактора КВ. При достижении подсинхронной скорости якорь КV отпадает и замыкаются нормально замкнутые контакты КV, включая КВ. На ОВ СД подается полное напряжение возбудителя. При включении контактора L запускается маятниковое реле времени L, контролирующее время разгона СД при полном напряжении на статорной обмотке. Если подсинхронная скорость не будет достигнута в течении времени уставки этого реле, разорвутся нормально замкнутые контакты L, и схема управления обесточится, придя в исходное состояние. При успешном пуске блокконтакты контактора КВ шунтируют контакты реле времени L и отключение схемы не происходит.
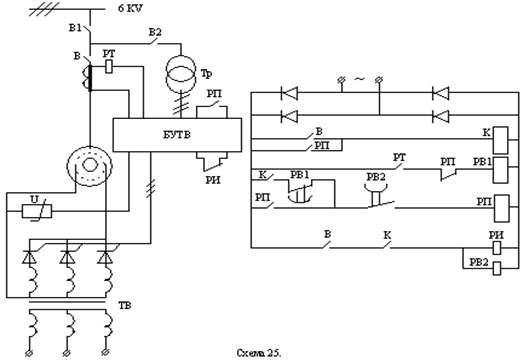
Автоматическое управление СД с тиристорным возбудителем (рис. 6.19)
Тиристорный возбудитель ТВ обладает быстродействием на порядок выше, чем электромашинный, что особо важно для СД, работающих с ударной нагрузкой, для увеличения их динамической устойчивости, и при резких падениях сетевого напряжения.
Элементы схемы:
БУТВ - блок управления тиристорным возбудителем;
ТВ - тиристорный возбудитель;
РТ - реле минимального тока;
U- вариатор (нелинейное сопротивление, защита от перенапряжения);
РП - реле включения ТВ;
РИ - реле инверторного режима ТВ (при включенном РП);
Q1 и Q2- разъединители высоковольтные;
В - масляный выключатель;
К - контактор привода вентилятора охлаждения ТВ;
РВ1 и РВ2- реле времени электромагнитного типа.
Пуск СД : включаем В, затем К, РИ, РВ1 и РВ2. Асинхронный пуск СД протекает под контролем РТ и РВ1 (аналогично 6.17). При уменьшении пускового тока ниже тока отпускания РТ нормально разомкнутый контакт РТ обеспечивает РВ1, которое дает дополнительную задержку времени для включения РП и подачи возбуждения обмотке возбуждения СД.
Остановка СД: отключить В, затем отключается РИ и переводится ТВ в инверсный режим (гашение поля возбуждения). Длительность этого режима определяется уставкой реле времени РВ2, которое обесточивается одновременно с РИ. При срабатывании РВ2 отключается РП и возбудитель, а также контактор К и ЭД вентилятора. Схема приходит в исходное состояние. Время установки РВ2 выбирается достаточным для полного гашения поля возбуждения СД.
БУТВ содержит автоматический регулятор возбуждения АРВ СД, который обеспечивает устойчивость работы СД и стабилизацию параметров питающей сети (cosj).
Сравнительный анализ принципов резисторного управления
1.В функции тока.
Достоинства: позволяет непосредственно контролировать ток с подачей команды на переключатель.
Недостатки: из-за низкой точности настройки токовых реле возможны затяжные пуски, застревание на одной из пусковых характеристик, мощность пусковых реостатов завышается.
2.В функции скорости.
Достоинства: простота пуска.
Недостатки: в ДПТ используется только при постоянном магнитном потоке; для АД - низкая точность.
3.В функции времени.
Достоинства: точность реализации пусковой диаграммы.
Недостатки: точность возможно обеспечить только при Мс=const,I=const.
Защита в СУЭП
Требования к защитам:
- избирательность;
- точность и надежность;
- заданное быстродействие.
Минимальная защита осуществляет отключение электроустановки при понижении сетевого напряжения (используется реле напряжения), при обрыве цепи возбуждения ДПТ и СД (используется реле минимального тока).
В СУ схеме 1 рис.6-2 она осуществляется блокконтактами КЛ, шунтируется кнопкой "Пуск". При перерыве в подаче электроэнергии повторное включение ЭД возможно после повторного нажатия кнопки "Пуск". В СУ схеме 2 нулевую защиту реализует нормально замкнутый контакт командоконтроллера в положении "О" и реле РН. Для подачи напряжения в схему управления необходимо командоконтроллер установить в положении "О", при этом включаем РН и ставится на самопитание через свои нормально разомкнутые контакты РН. При перерыве в энергоснабжении при работе ЭП повторное включение ЭД возможно после установления К\К в положение "О".
Максимально-токовая защита - защита от токов короткого замыкания (к.з.). Применяют плавкие предохранители, реле максимального тока, автоматические выключатели АВ с электромагнитными расцепителями, защитные электронные устройства с датчиками тока.


Цепи управления защищаются теми же аппаратами,что и силовые, цепи при мощности двигателя до 10кВт или своими автоматами и предохранителями.
Ток уставки автоматов определяется реле и максимально токовых расцепителей:
для АД с к.з. Iуст=(1.2-I.3)Iн;
для АД с ф.р. Iуст=(2-2.5)Iн;
для схем управления Iуст=2.5Iус,
Iус-максимальный ток при вклячении всех катушек.
Выбор плавкой вставки: выбирается по отношению к Iп
-для АД с к.з.
Iпв=Iп/2.5 при tпуск<5с;
-для АД с ф.р. и ДПТ(у которых обычно Iп=2Iн)
Iпв=(1¸1.25)Iн;
-для цепей управления
Iпв=2.5Iус.
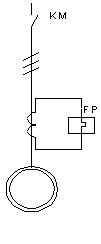
Тепловая защита ЭД - защита от перегрузки и для трехфазных АД - от работы на двух фазах. Применяют тепловые реле, тепловые расцепители в АВ, позисторы, максимально токовые реле при работе ЭД в повторно-кратковременном режиме.
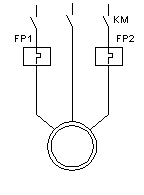
FP-включен в две фазы одновременно.
Выбор реле и нагревателеного элемента производится по номинальной мощности Рн двигателя или тока элемента Iнэ=Iн/![]()
![]() ,
,![]() -температура окружающей среды.
-температура окружающей среды.
Специальные защиты - защита от перенапряжений (шунтируются обмотки возбуждения ДПТ разрядным резистором с полупроводниковым диодом), от повышения напряжения, скорости ЭД, путевая защита, от обрыва возбуждения, защита от затяжного пуска (используется реле времени) и выпадения из синхронизма для СД.
Защита от перенапряжения или обрыва обмотки возбуждения ДПТ
Защита от обрыва осуществляется реле обрыва поля с выдержкой времени отключает контактор. Защита от перенапряжения при обрыве ОВ обеспечивается цепью VD-R, шунтирующей ОВ.
При Uпит=220В R=(6![]() 8)Rов;
8)Rов;
Uпит=110В R=(3![]() 5)Rов.
5)Rов.
Защита СД от выпадения из синхронизма.


Применнительно для СД работающего с резкопеременной нагрузкой.В схеме использовано РФ-реле форсировки,в которое включен контактор форсировки КФ при снижении напряжения на 15![]() %.
%.
СУ также реализует различные блокировки:
- технологические (обеспечение последовательности включения ЭП и режимов работы ЭД);
- защитные (защита ЭД и ТМ от неправильных действий, запрещают включение - одновременное или другое, пример - электрические блокировки реверсивного пускателя, фотодатчики прессовой установки).
Разомкнутая СУЭП с каналом компенсации возмущения (стабилизирующая СУЭП)
|
|

Рис. 8.20.
ОУ - тиристорный преобразователь, двигатель с рабочим механизмом.
АУУ - задающий потенциометр, датчик момента, УПТ.
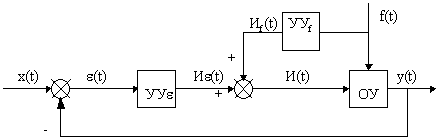
В этом случае при управлении по разомкнутому циклу выполняется измерение возмущающего воздействия f(t) и такое его преобразование в УУ, которое обеспечивает компенсацию его влияния на регулируемую величину y(t).
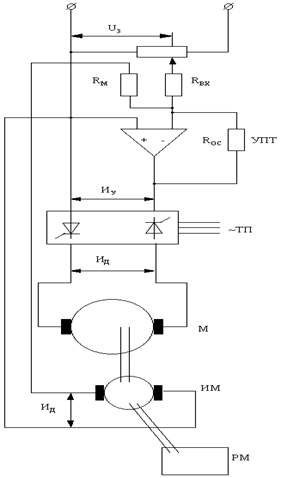
Пример СУЭП с принципом управления по возмущению - система стабилизации скорости двигателя М. (рис.6.21)
ИМ - измеритель момента (тензодатчики с токосъемом).
Напряжение задания скорости U3 суммируется с напряжением, пропорциональным Мс, на входе УПТ. Результирующее напряжение с выхода УПТ является управляющим воздействием, его зависимость от заданного значения скорости w3 и основного возмущающего воздействия Мс определяет алгоритм управления разомкнутой системы:
Uу = К3 w3 + Км Мс.
В системе без связи по возмущению (Км=0) напряжение Uд на входе двигателя определяется только заданием U3. При изменении Мс Uд остается постоянным, поэтому скорость двигателя с увеличением Мс уменьшается.

Рис. 6.22.
При наличии связи по возмущению (Км¹0) с увеличением Мс увеличивается Uм=Км Мс, увеличивается Uу, увеличивается Uд, что при соответствующей настройке (выборе Км) обеспечит компенсацию влияния Мс и, следовательно, независимость скорости от основного возмущающего воздействия на ОУ - Мс.
Принцип управления по возмущению в чистом виде, без обратных связей, применяется редко, т.к. может не обеспечить требуемой точности в результате влияния не компенсируемых воздействий, имеются сложности в измерении возмущений, и даже может быть СУЭП не работоспособна.
Похожие работы


... имеют некоторый типовой вид. Сложные (многосвязные) технические объекты в совокупности с узлами (устройствами) управления первого, исполнительного уровня образуют подсистемы оперативного управления, которые представляют собой многосвязные системы автоматического регулирования (МСАР) по типу следящих систем. Задающие воздействия для них формируются на втором, тактическом уровне, а цели управления ...



... при которых работа ЭП удовлетворяет требования техпроцесса. Основное требование к системе управления - обеспечение допустимого значения ошибки управления e(t) = х(t)-y(t) в установившихся и переходных режимах, что определяется статическими и динамическими характеристиками САУ ЭП. Статическая характеристика замкнутой СУЭП - зависимость регулируемой переменной от основного возмущающего воздействия ...
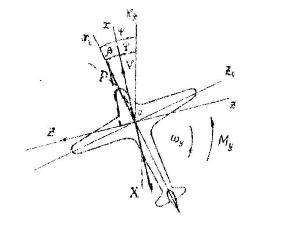
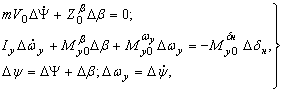

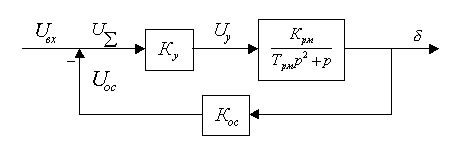
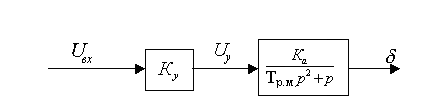
... рулевого привода, т. е. увеличивает его быстродействие. Частота собственных колебаний рулевого привода должна быть примерно на порядок выше частоты угловых колебаний ЛА. 5 Синтез системы Составим структурную схему разомкнутой системы рулевого привода с жесткой обратной связью и определим значения коэффициентов. Структурная схема разомкнутой системы рулевого привода показана на рис 1: ...
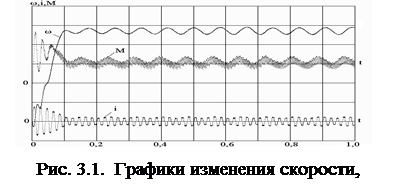
... больших колебаний (рис 3.2). В данном случае скорость двигателя может превысить синхронную, а область колебаний охватывает первый и второй квадранты. 2. Методика исследования устойчивости разомкнутой системы электропривода ТПН-АД Динамические свойства асинхронных двигателей. Реальные переходные процессы асинхронного электропривода сопровождаются изменением скорости двигателя. Однако, в ряде ...
0 комментариев