Навигация
Функции, выполняемые системой
17810
знаков
4
таблицы
1
изображение
2. Функции, выполняемые системой
Анализируя условие задания можно выделить следующие функции, выполняемые системой:
1: Функция хранения полученных в ходе работы устройства данных. Данную функцию выполняет блок оперативной памяти. Блок оперативной памяти устройства в связи с этим должен обладать следующими свойствами ( в идеале):
а) достаточным для данного устройства объёмом ОЗУ;
б) достаточным быстродействием ;
в) высокой надёжностью;
г) низкой потребляемой мощностью;
д) возможностью дальнейшего наращивания .
2: Функция хранения «драйвера» устройства. Эту функцию выполняет блок ПЗУ. В связи с этим данный блок должен характеризоваться следующими параметрами (в идеале):
а) достаточным для данной программы объёмом;
б) возможностью перезаписи с целью улучшения работы «драйвера» устройства (применение новых алгоритмов, расширения диапазона применения);
в) низкой потребляемой мощностью;
г) высоким быстродействием;
д) требования надёжности .
3: Функция информационного обмена. Эту функцию выполняет блок ввода-вывода. К этому блоку предъявляются следующие требования (в идеале):
а) высокое быстродействие;
б) функциональная завершённость;
в) возможность работы при отсутствии внешнего контроллера.
4: Функция диалога система – пользователь. Эту функцию реализует система индикации и система ввода информации. К ним предъявляются следующие требования (в идеале):
а) достаточная яркость изображения;
б) защита от неправильного ввода информации;
5: Функция обработки поступаемых данных. Микропроцессор Intel 8086. Вследствие этого, основными требованиями к этим компонентам микропроцессорной системы являются требования по точности и быстродействию.
3. Интерфейс: Система – пользователь
Интерфейс оператор – система осуществляется при помощи системы индикации (для отображения полученной информации) и системы ввода информации для задания параметров обработки поступающей информации.
Необходимо отметить, что интерфейс должен быть простым и доступным для неквалифицированного пользователя.
4. Выбор соотношения между аппаратной и программной частями
При выборе соотношения между аппаратной и программной частью устройства необходимо руководствоваться прежде всего теми требованиями к устройству, которые предъявляются в ТЗ на данное устройство. Для получения высокого быстродействия, естественно, лучше будет если все компоненты системы будут реализованы аппаратно, что в свою очередь увеличит стоимость изделия в целом. Необходимо найти такое соотношение между программной и аппаратной частями, для которого при достаточной производительности, будет наименьшая стоимость изделия. В нашем случае можно предложить следующий вариант:
1: Блок хранения полученных в ходе работы устройства данных.
Данный блок реализуется аппаратно в виде набора микросхем ОЗУ.
2: Блок хранения «драйвера » устройства.
Данный блок реализуется аппаратно в виде набора микросхем ПЗУ.
3: Блок информационного обмена.
Данный блок реализуется аппаратно в виде набора портов ввода – вывода.
4: Блок диалога система – пользователь.
Данный блок реализуется аппаратно в виде набора схем индикации и клавиатуры.
5: Блок управления и анализа сигналов.
Данный блок реализуется аппаратно в виде микропроцессора Intel 8086 и программно в виде программы алгоритма работы микропроцессора.
6: Блок получения данных для последующей обработки.
Данный блок реализован аппаратно в виде дискретных элементов и таймера.
5. Проектирование аппаратных средств системы. Разработка функциональной и принципиальной схемы системы
В нашем курсовом проекте используется в качестве управляющего ядра отечественный аналог микропроцессора 8086 процессор К1810ВМ86 (далее просто ВМ86). Данный микропроцессор выполнен в едином сорокавыводном корпусе, по n-МОП-технологии. Потребляет данная микросхема 1.7 Вт, и питается от источника питания +5В.
Микропроцессор содержит четырнадцать 16-битовых внутренних регистра, и образует 16-битовую шину данных. Шина адреса имеет двадцать линий, что позволяет адресовать до одного мегабайта.
Назначение выводов микропроцессора ВМ86 приведено в таблице 5.1.
Таблица 5.1- назначение выводов микропроцессора ВМ86
| Обозначения | Назначение | Тип |
|
| Линии шины адреса/данных Линии адреса/состояния Разрешение старшего байта шины/состояния Чтение, МП выполняет цикл чтения Готовность, адресованное устройство готово к взаимодействию с МП Запрос прерывания Немаскируемое прерывание Входной сигнал, проверяемый командой WAIT Тактовые импульсы Сброс, заставляет МП немедленно прекратить выполняемые действия Минимальный/максимальный режим работы | Выход Выход Выход Выход Вход Вход Вход Вход Вход Вход Вход |
Для нормального функционирования микроЭВМ недостаточно управляющих сигналов, генерируемых микропроцессором. МикроЭВМ в каждом машинном цикле должна получать более полную информацию о состоянии МП.
Для принятия и передачи данных и команд микропроцессору необходимы вспомогательные микросхемы, входящие в состав комплекта. Приведём и их основные характеристики.
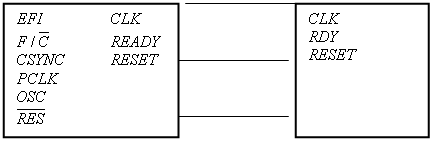
Генератор тактовых импульсов КР1810ГФ84 предназначен для управления центральным процессором КР1810ВМ86 и периферийными устройствами, а так же для синхронизации сигналов ![]() с тактовыми сигналами центрального процессора. Генератор тактовых импульсов включает схемы формирования тактовых импульсов
с тактовыми сигналами центрального процессора. Генератор тактовых импульсов включает схемы формирования тактовых импульсов ![]() , сигнал сброса
, сигнал сброса ![]() и сигнала готовности.
и сигнала готовности.
Таблица 5.2. Назначение выводов микросхемы КР1810ГФ84
| Наименование вывода | Назначение вывода |
| XTAL1,XTAL2 | Выводы для подключения кварцевого резонатора |
| TANK | Вывод для подключения параллельного LC-контура |
| OSC | Выход генератора используемый для тактирования внешних устройств |
| Ф1,Ф2 | Выходы тактовых импульсов |
| Ф2Т | Выход тактовых импульсов Ф2 ТТЛ-уровней |
| SYNC | Вход синхронизации |
| STSTB | Выход сигнала, используемого для фиксации слова состояния микропроцессора |
| RESIN | Вход для асинхронного сигнала сброса |
| RESET | Выход сигнала RESET микропроцессора |
| RDYIN | Вход для асинхронного сигнала готовности |
| READY | Выход сигнала READY микропроцессора |
Схема формирования тактовых импульсов вырабатывает сигналы: ![]() -тактовой частоты для ВМ86,
-тактовой частоты для ВМ86, ![]() -тактовой частоты для управления периферийными БИС,
-тактовой частоты для управления периферийными БИС, ![]() -тактовой частоты задающего генератора, необходимые для управления устройствами, входящими в систему, и для синхронизации.
-тактовой частоты задающего генератора, необходимые для управления устройствами, входящими в систему, и для синхронизации.
Сигналы могут формироваться из колебаний основной частоты кварцевого резонатора, подключаемого к входам Х1,Х2, или от внешнего генератора, подключаемого к входу ![]() .
.
Способ подключения генератора тактовых импульсов к микропроцессору показан на рис.5.1.
![]()
![]()
Рис.5.1. Подключение генератора тактовых импульсов к микропроцессору ВМ86.
Восьмиразрядные шинные формирователи КР580ВА86, применяются как буферные устройства данных в микропроцессорных системах. Формирователь состоит из восьми функциональных блоков с общими сигналами управления ![]() и
и ![]() .
.
Назначение выводов: А7-А0 – вход/выход линии данных. Они могут быть как входными, если на Т - сигнал высокого уровня, и выходными, если на Т- сигнал низкого уровня.
В7-В0 – вход/выход линии данных. Они являются входными, если на Т – сигнал низкого уровня, и выходными, если на Т – сигнал высокого уровня.
Т- входной сигнал управления направлением передачи.![]() - входной сигнал разрешения передачи. При
- входной сигнал разрешения передачи. При ![]() = 0 снимается Z-состояния с выхода усилителя –формирователя, выбранного по входу Т.
= 0 снимается Z-состояния с выхода усилителя –формирователя, выбранного по входу Т.
Похожие работы
... . Установить тумблер «Питание» на задней панели пульта в положение «ВКЛ». Прогреть прибор в течение 15 минут. 2.6 Требования к метрологическому обеспечению 2.6.1 Порядок приемки и контроля Цифровой измеритель расхода воздуха должен подвергаться приемно-сдаточным испытаниям. Перед приемно-сдаточными испытаниями прибор должен пройти технологическую приработку не менее 10 раз. Цифровой ...
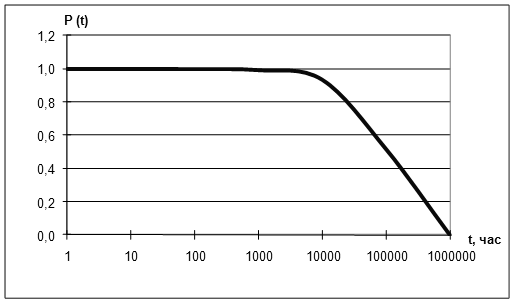
... час., по формуле: (1.7) Рисунок 1.2 – График вероятности безотказной работы Глядя на полученные результаты таблицы 1.2 и рисунка 1.2, становится, очевидно, что цифровой измеритель L и C надежен в работе и может проработать не менее 152439 часов. 2 Технологическая часть 2.1 Анализ технологичности конструкции 2.1.1 Качественный анализ технологичности ...

... можно подсчитать, что у микроконтроллера должно быть не менее 13 линий ввода-вывода(11 линий для работы с ЖКИ-модулем и две линии для работы с датчиком давления). В данном случае был выбран микроконтроллер MC68HC908JL3, который имеет 22 линии ввода-вывода. То есть, по сути дела у нас остаётся свободными, 9-ть линий ввода-вывода, которые можно использовать для различных усовершенствований прибора ...
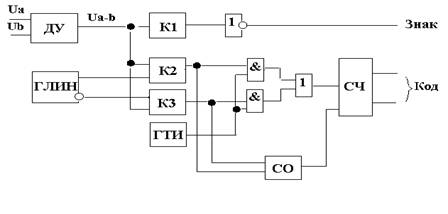
... должны три входить компаратора напряжения. Один (К1) является компаратором знака напряжения разности. Два других (К2, К3) сравнивают напряжение разности с нарастающим или падающим напряжением, подаваемым с ГЛИН. Структурная схема цифрового измерителя разности двух напряжений приведена на рисунке 2.1 Рисунок 2.1 - Структурная схема цифрового измерителя разности двух напряжений Схема работает ...
0 комментариев