Навигация
Разработка устройства, предназначенного для формирования импульсных сигналов с заданным периодом и скважностью - ШИМ-регулятор
27017
знаков
2
таблицы
18
изображений
Реферат
Пояснительная записка состоит из 30 страниц, на которых, помимо основного текста, размещены 8 таблиц, 12 рисунков. При написании использовано 9 источников, среди которых как книги, так и страницы Интернет.
УПРАВЛЕНИЕ, СХЕМОТЕХНИКА, МИКРОЭЛЕКТРОНИКА, АЛГОРИТМИЗАЦИЯ, ПРОГРАММИРОВАНИЕ.
В курсовом проекте разработано устройство, предназначенное для формирования импульсных сигналов с заданным периодом и скважностью - ШИМ-регулятор.
Разработана принципиальная электрическая схема устройства, написана программа управления ШИМ-регулятором через LPT порт ЭВМ, произведена сборка и макетирование.
В проекте подробно описаны выбранные элементы схемы и рассказано о принципах работы ШИМ – регулятора.
Содержание
Введение
1 Описание ШИМ-регулятора
1.1 Классификация видов ШИМ
1.2 Применение широтно-импульсной модуляции
2 Выбор элементной базы
2.1 Микросхема КР580ВИ53
2.2 Микросхема К155АП5
2.3 Микросхема К155АГ3
3 Схема макета
3.1 Схема принципиальная электрическая
3.2 Таблица контактов
4 Программа управления
4.1 Логика работы
Заключение
Приложение А
Введение
До внедрения цифового широтно-импульсного модулирования (ШИМ) использовался аналоговый ШИМ. При аналоговой реализации ШИМ, сигналы получаются путем сравнения треугольного несущего сигнала и сигнала, подлежащего модуляции. Для трехфазных систем необходимы три независимых канала ШИМ: по одному на каждую фазу. Входами такого ШИМ устройства являются заданные фазные напряжения. В разомкнутых частотно-управляемых ЭП эти напряжения формируются на основе принятого закона частотного управления, в замкнутых ЭП - формируются с помощью контроллера.
При цифровой реализации широтно-импульсной модуляции в качестве несущего колебания используется периодическая последовательность прямоугольных импульсов, а информационным параметром, связанным с дискретным модулирующим сигналом, является длительность этих импульсов. Периодическая последовательность прямоугольных импульсов одинаковой длительности имеет постоянную составляющую, обратно пропорциональную скважности импульсов, то есть прямо пропорциональную их длительности. Пропустив импульсы через ФНЧ с частотой среза, значительно меньшей, чем частота следования импульсов, эту постоянную составляющую можно легко выделить, получив постоянное напряжение. Если длительность импульсов будет различной, ФНЧ выделит медленно меняющееся напряжение, отслеживающее закон изменения длительности импульсов. Таким образом, с помощью ШИМ можно создать несложный ЦАП: значения отсчетов сигнала кодируются длительностью импульсов, а ФНЧ преобразует импульсную последовательность в плавно меняющийся сигнал.
При работе с приводом может потребоваться управлять его скоростью. В простейшем случае это можно делать вставив транзистор (управляемое сопротивление) между источником фиксированного напряжения и приводом. Однако такой способ при управлении мощными приводами приводит к выделению большой тепловой мощности на транзисторе-сопротивлении.
ШИМ использует транзисторы(могут быть и др. элементы) не в активном, а в ключевом режиме, т. е. транзистор всё время или разомкнут (выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет бесконечное сопротивление, поэтому ток в цепи не течёт, и, хотя всё напряжение питания падает на транзисторе, т.е. КПД=0%, в абсолютном выражении выделяемая на транзисторе мощность равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю — выделяемая мощность так же мала.
В данном случае была поставлена задача разработать ШИМ - регулятор на основе программируемого таймера серии КР580, чтобы регулировать ширину импульса. Такое устройство обеспечивает сохранность транзистора и экономичность.
1 Описание ШИМ-регулятора
1.1 Классификация видов ШИМ
В общем случае все виды ШИМ основаны на изменении длительности импульсов равной амплитуды, следующих через равные интервалы времени в соответствии с принятым законом формирования напряжения. Законы формирования, общие для любого метода модуляции, определяются функцией построения (модулирующим сигналом). На основании литературных данных целесообразно распределить разновидности ШИМ по степеням соответствия параметров импульсов значениям модулирующего сигнала согласно основным признакам (рисунок1).
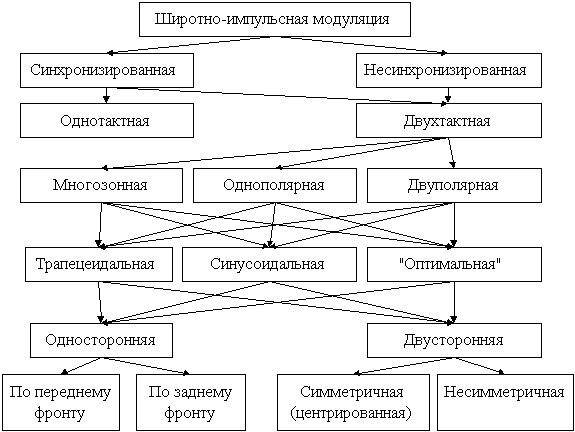
Рисунок. 1. Классификация видов ШИМ
Следует отметить, что в связи с развитием методов формирования синусоидальных напряжений, трапецеидальная ШИМ уже почти вытеснена синусоидальной. Двуполярная ШИМ характеризуется постоянным действующим значением выходного напряжения, поэтому регулирование значения основной гармоники сопровождается перераспределением энергии в спектре. Однополярная ШИМ дает лучший гармонический состав, действующие значения напряжения при этом меньше, чем в двуполярном варианте.
Современные ЭП строятся с использованием микроконтроллеров (МК), с помощью которых реализуется и ШИМ. В связи с этим вводится новый термин - тактовая частота ШИМ Fт, которая определяется точностью аппроксимации несущего Fн и модулирующего Fм сигналов. Как правило, соотношения между ними выбираются следующими:
Fн і n3Fм (n=2, 3, 4,...) и Fт і m2Fн (m=3,4,5,...)
Независимо от того, какая разновидность ШИМ используется, ее реализация на МК принципиально возможна двумя способами: традиционный (формирование выходных напряжений осуществляется в результате постоянного сравнения модулирующего и несущего сигналов) и табличный (полностью рассчитывается заранее и заносится в ПЗУ, из которого затем считывается).
При реализации ШИМ традиционным способом приходится использовать либо универсальные мощные (развитая система команд и высокое быстродействие) микроконтроллеры, либо специализированные, относительно дорогие контроллеры (где алгоритм реализуется аппаратно - программно). Реализация сложных алгоритмов ШИМ традиционным способом затруднена на универсальных МК большим объемом программы, а на специализированных - возможностями архитектуры конкретного типа МК. Специализированные МК, ориентированные на применение в электроприводах, имеющие аппаратную поддержку ШИМ выпускаются такими фирмами как MOTOROLA (68HC705MC4, 68HC708MP16), INTEL (8xC196MC/MD/MH), TEXAS INSTRUMENTS, и другими [2,3].
ШИМ - генераторы МК этого типа имеют от двух до шести независимых каналов и управляются несколькими (3-24) программно доступными регистрами. ШИМ - генераторы позволяют реализовывать синхронизацию каналов, формирование "мертвого" времени, его компенсацию, выравнивание импульсов по фронту или по центру, встроенные защиты от неисправностей, некоторые другие функции. Частоту несущего сигнала можно регулировать от 8 МГц до 125 Гц. В последнее время вместо встроенных ШИМ - генераторов микроконтроллеры оснащаются более универсальными средствами, которые, в том числе, реализуют и алгоритмы ШИМ. В контроллерах MOTOROLA (68HC16Y1, MC68336) это так называемый таймерный сопроцессор TPU (Timer Processor Unit), в изделиях INTEL (8xC196NP/NU) это интегрированный процессор событий EPA (Event Processor Array). В обоих случаях имеется в виду многоканальный таймер с очень гибкой схемой управления, полуавтономной от ядра контроллера. Программирование и TPU, и EPA осуществляется либо полностью, либо с использованием стандартных подпрограмм, в числе которых имеется и ШИМ с аналогичными указанным выше параметрами. Все перечисленные МК ориентированы на реализацию двуполярной ШИМ, которая, как указывалось, не позволяет получить наилучший гармонический состав выходного напряжения.
Достоинства табличного способа заключаются в том, что он позволяет реализовать любые алгоритмы ШИМ с высокой несущей частотой с помощью микроконтроллеров, весьма бедных в функциональном отношении. Тем не менее, этот способ не нашел широкого применения из-за следующих причин.
Обычно табличная ШИМ подразумевает поочередное считывание с частотой Fт того из массивов ПЗУ, который в настоящий момент соответствует заданным выходным параметрам. В результате, для реализации такой табличной ШИМ необходимо не менее 64 кБ (Fмmax = 60 Гц; диапазон регулирования (0.5-120)% дискретность регулирования примерно 0.5%). Этим практически исчерпываются возможности дешевых 8-разрядных МК.
Еще одна трудность - плавное регулирование тактовой частоты ШИМ при изменении частоты модулирующего сигнала. Здесь, как правило, применяется управляемый напряжением генератор, либо целочисленный 16-разрядный предварительный делитель, сигнал с которого вводится в МК.
Предлагается новый способ табличной реализации ШИМ, свободный от указанных недостатков. Необходимо отметить, что число всех возможных сочетаний состояний вентилей АИН равно 27 (обычно не превышает 12). В связи с этим предлагается "индексная" (в отличие от описанной выше "линейной") табличная ШИМ, которая реализуется по следующим принципам.
Сначала составляется нумерованный массив с допустимыми сочетаниями состояний вентилей АИН. Назовем его массивом состояний. Затем обычным способом рассчитываются массивы для всех частот модулирующего сигнала. После этого в каждом массиве, соответствующем конкретной частоте Fм, сохраняются только строки (с сохранением исходной нумерации), в которых происходит переключение, все остальные строки удаляются. Из этих "сокращенных" массивов составляются индексные массивы, которые содержат номера шагов (периода тактовой частоты ШИМ на периоде модулирующего сигнала), на которых происходят переключения и соответствующий индекс массива состояний. Индексные массивы и массив состояний записываются в ПЗУ, после чего ШИМ осуществляется обычным способом.
Алгоритм работы предлагаемой ШИМ приведен на рисунке 2.
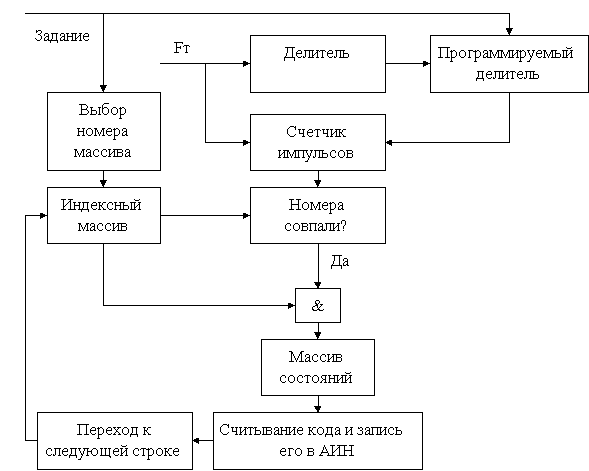
Рисунок. 2. Алгоритм работы индексной ШИМ
Индексно - табличная реализация ШИМ требует существенно меньшего объема памяти, чем традиционная. Например, для получения указанных выше параметров (Fмmax = 60 Гц; диапазон регулирования (0.5-120)% дискретность регулирования примерно 0.5%) индексная ШИМ требует менее 11кБ. Экономия объема памяти позволяет довести соотношение Fт/Fн до 40 (тактовая частота ШИМ Fт примерно 48кГц) и, тем самым, увеличить точность аппроксимации несущего и модулирующего сигнала не менее, чем в 4 раза.
Таким образом, предлагаемая индексно - табличная ШИМ позволяет получить высокие показатели АИН и всего привода в целом, используя дешевые 8-разрядные микроконтроллеры. Тем более, все резервы этого класса МК еще не использованы, т.к. выпускаемые сейчас высокоскоростные модификации МК семейства MCS-51 (например, 80C3x0 фирмы DALLAS SEMICONDUCTOR) работают в 8.25 раза быстрее младших моделей этого семейства (КР1830ВЕ31).
1.2 Применение широтно-импульсной модуляции (ШИМ)Широтно-импульсная модуляция, рассматриваемая в следующих примерах, используется в разных задачах - от формирования звукового сигнала и управления яркостью светодиодов до управления скоростью вращения электромотора. Все эти задачи основываются на базовом принципе ШИМ-сигнала - чем больше скважность импульсов, тем больше среднее значение напряжения (рисунок 3). Зависимость среднего напряжения от величины скважности является линейной:
VСР = скважность х Vмакс
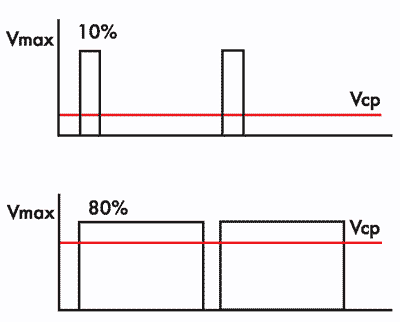
Рисунок. 3. Зависимость среднего значения напряжения от скважности ШИМ
Выбор частоты ШИМ:
Частота ШИМ зависит от различных факторов. При увеличении частоты увеличиваются потери на переключение, емкость и индуктивность нагрузки влияет на изменение формы сигнала. Поэтому в микромощных устройствах следует выбирать минимально возможную частоту ШИМ, а в схемах с емкостной или индуктивной нагрузкой выбирать частоту исходя из анализа схемы.
1. Управление электродвигателямиШИМ применяется для управления двигателями в импульсном режиме. По характеристикам двигателя необходимо подобрать значение частоты ШИМ, чтобы обеспечить оптимальные характеристики электропривода. При выборе задающей частоты важным критерием являются акустические шумы, создаваемые двигателем при работе. Коллекторные двигатели могут создавать звуковой шум на частотах от 20 Гц до 4 кГц. Для исключения этого нежелательного эффекта нужно выбирать частоту выше 4 кГц. На таких частотах акустического шума уже не будет, так как механические части имеют более низкие резонансные частоты.
2. Светодиоды и устройства освещенияШИМ часто используется для изменения яркости световых приборов. Эффект мерцания может быть заметен на частотах ниже 50 Гц, поэтому на практике частота ШИМ выбирается около 100 Гц или выше.
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...

... принципиальной схемы приведена в Приложении Б Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства 4. Экономический расчет Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле: , (1.1) где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата ...
... , КФ1158ЕНхх с малым падением напряжения вход - выход охватывает диапазон выходных напряжений от 3 до 15В. Все стабилизаторы предназначены для широкой области применения и идеально подходят для нужд автомобильной электроники, так как имеют встроенную защиту от выбросов входного напряжения при сбросе нагрузки генератора до 60 В, защиту при подключении входного напряжения в обратной полярности и от ...

... при повышении частоты форма тока начинает отклоняться от синусоидальной и на очень больших частотах становится треугольной. Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от нескольких факторов: · скорости · тока в обмотках · схемы драйвера На рис. 14а показана зависимость момента от угла поворота ротора. Рис. 14. Возникновение ...
0 комментариев