Разработка микропроцессорной системы на основе микроконтроллера
Разработка и отладка аппаратных средств
Выбор микроконтроллера
Постановка задачи
Разработка алгоритма управления
Выбор, описание и расчеты элементной базы
ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ОБЪЕКТА РАЗРАБОТКИ
Расчет расходов на создание ПО
Расчет стоимости разработки конструкторской документации и сборки устройства
Анализ аналогичных устройств
Требования к производственным помещениям
Шум и вибрация
Электромагнитное и ионизирующее излучения
Режим труда
Расчет вентиляции
Навигация
Разработка алгоритма управления
Разработка устройства автоматического регулирования света на микроконтроллере
155474
знака
21
таблица
15
изображений
2.4 Разработка алгоритма управления
Программа составлена и отлажена в бесплатной среде разработки VM Lab версии 3.14 (в окне 'About Visual Micro Lab' эта версия указана как 3.12).
Код программы написан на языке ассемблера, содержит более 1500 строк, занимает в памяти программ МК более 3 КБ. Задействованы все 32 регистра, 51 байт оперативной памяти (SRAM, ОЗУ), 45 байт энергонезависимой памяти EEPROM.
На первый взгляд, возможности МК ATmega16, имеющего 16 КБ программной памяти, 1 КБ SRAM, 512 байт EEPROM, и богатый набор периферийных устройств, кажутся избыточными. На самом деле, выбор МК "с запасом" сделан умышленно, чтобы иметь возможность совершенствовать устройство и наращивать его функциональные возможности.
При необходимости код может быть перенесён на другие МК семейства ATmega.
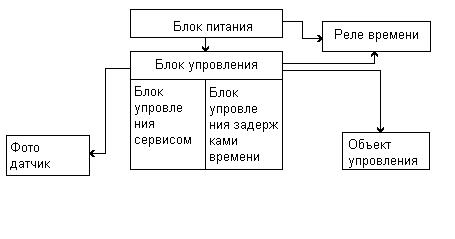
Алгоритм управления показан на Рис.2.4. Каждый блок начинается с названия файла, в котором размещён программный код данного блока. Подпрограммы обозначены блоком меньшего горизонтального размера. Среди них есть функции, т.е. подпрограммы, возвращающие значения. Для упрощения они тоже называются подпрограммами. Отличие подпрограмм, расположенных в файле ProceduresINT.asm, от подпрограмм в файле ProceduresEXT.asm заключается в том, что первые предназначаются только для данного проекта, а вторые являются универсальными и могут найти применение в других проектах. Блок Startup.asm тоже использует некоторые подпрограммы, но для упрощения восприятия рисунка эти связи на блок-схеме не показаны.
2.5 Разработка программного обеспечения микроконтроллера
Далее кратко рассмотрены ключевые моменты программной части проекта. Дополнительная информация содержится в комментариях, которыми снабжена практически каждая строка программы. Листинг программы и объектный файл приведен в Приложении А. Алгоритм работы второго канала полностью аналогичен алгоритму работы первого, поэтому комментарии приводятся только для первого канала. По этой же причине в названиях регистров, процедур и т.п. номер канала либо не указывается совсем, либо обозначается буквой "X" или "x". Команды, начинающиеся с символа комментария (";") в начале строки, предназначены для облегчения разработки, отладки и тестирования.
 | |||
| |||
Они ускоряют ход выполнения программы на этапе отладки. Закомментированные команды, перед которыми есть несколько знаков пробела, не используются в данном проекте, но оставлены в качестве шаблона для применения того же кода в других проектах. Для поддержания совместимости символы табуляции заменены знаками пробела.
Программа оптимизирована по быстродействию, поскольку, чем меньше времени потребуется для выполнения кода, тем большей максимальной яркости можно достигнуть (эта взаимосвязь подробно рассмотрена далее). Особое значение имеет время выполнения процедуры ADCSampling. От этого зависит качество стабилизации, т.е. насколько быстро устройство может реагировать на колебания сетевого напряжения. В текущей реализации процедура ADCSampling выполняется за 21 мкс (без учёта времени преобразования АЦП, на которое требуется 27 мкс).
Адресное пространство энергонезависимой памяти разделено на три области. В первой хранятся настраиваемые пользователем параметры устройства, во второй – системные переменные, в третьей – результаты диагностики. Первая область отделена от второй несколькими пустыми ячейками, значения которых равны $FF. Третья область находится в конце адресного пространства. Так сделано для удобства восприятия данных в окне симулятора VMLab, а также для упрощения ориентации в файле EEPROM dimmer.eep, когда требуется определить параметры настройки устройства. Первые 16 ячеек EEPROM не используются. Помимо удобства восприятия, это предохраняет содержимое первой ячейки от случайного изменения, когда регистр адреса EEPROM равен нулю. Нулевое значение присваивается этому регистру во время инициализации (блок Reset.asm). По той же самой причине не используется и последняя ячейка EEPROM, чтобы исключить изменение её содержимого, когда регистр адреса равен максимальному значению $01FF.
Принимая во внимание ограниченное количество циклов перезаписи EEPROM (100 000 согласно паспортных данных), в памяти сохраняются только самые необходимые данные, а именно уровень установленной пользователем яркости и текущее состояние устройства.
Прерывания не задействованы. Программный код, расположенный в блоке Main.asm, выполняется в бесконечном цикле. Тем самым удаётся повысить быстродействие за счёт отказа от команды RETI и команд работы со стеком. Тем не менее, в целях диагностики неисправностей, срабатывание любого прерывания фиксируется и запоминается в EEPROM (подпрограмма WrongINT.asm). Также в целях диагностики запоминается причина, вызвавшая сброс МК (блок ResetCause.asm). Ячейки диагностики, как уже отмечалось, находятся в конце области EEPROM. Если значение хотя бы одной из них отлично от нуля, это говорит о наличии неисправности.
Сторожевой таймер настроен на максимальный период срабатывания (2 секунды). Чем больше интервал, тем легче заметить срабатывание таймера. Особенно это помогает на этапе отладки.
Супервизор питания запрограммирован на минимальный порог 2,7 В. За счёт этого обеспечивается надёжный запуск МК с учётом большой ёмкости конденсатора, установленного в фильтре питания. Супервизор гарантирует стабильный запуск независимо от того, на какое время пропадёт напряжение в сети.
Энергосберегающие режимы не используются. Это связано с тем, что в течение примерно 9,5мс каждого полупериода ведётся непрерывное измерение сетевого напряжения, а в оставшиеся 0,5мс выполняется основная программа. Переводить МК в спящий режим на столь короткое время не имеет смысла. К тому же, возврат МК из любого спящего режима требует дополнительных затрат времени, что сказывается на быстродействии.
Выключение АЦП на время выполнения основной программы тоже не имеет смысла. Установлено, что потребляемый МК ток снижается при этом всего на 10мкА.
Во время инициализации МК интерфейс JTAG и компаратор в целях снижения энергопотребления отключаются.
Выходы МК переключаются одновременно. Это необходимо для того, чтобы оба канала имели равные временные задержки и работали одинаково. С этой целью в программу введён специальный буферный регистр rOutChannels. Изменение состояния выходов осуществляется только командой OUT pMainOut, rOutChannels. После старта МК буферный регистр содержит копию состояния порта pMainOut, большинство выводов которого, по аналогии с другими неиспользуемыми выводами, настроены как входы с внутренними подтягивающими резисторами. Поэтому никакие биты регистра rOutChannels (кроме двух старших) не должны модифицироваться программой. Также не должно изменятся состояние порта напрямую, т.к. любое изменение будет перезаписано содержимым буферного регистра.
АЦП, имеющий разрешение 10 бит, используется в режиме 8-битного преобразования, поскольку высокая точность измерений не требуется. Это позволяет ему работать на максимальной частоте (500 кГц), что обеспечивает высокое быстродействие. Согласно [12, раздел 2.8], допускается работа АЦП на частотах до 1 МГц. Уменьшенное до 8 бит разрешение служит также дополнительной защитой от помех. Для сокращения количества команд управления, АЦП работает в режиме автозапуска, сигналом которому является окончание предыдущего цикла преобразования. Первое преобразование запускается при инициализации МК.
Таймеры не используются. Они создают помехи работе АЦП. Для исключения этого явления существует специальный энергосберегающий режим АЦП ''ADC Noise Reduction''. Но поскольку режимы энергосбережения по причинам, указанным ранее, не используются, временные задержки пришлось реализовать на основе регистров или ячеек ОЗУ.
По окончании инициализации всем регистрам и ячейкам ОЗУ присваивается нулевое значение (блок SRAMInit.asm). В результате, не нужно помнить о том, чтобы все переменные были проинициализированы, т.е. не содержали бы случайных значений. Как следствие, значительно облегчается их поиск.
После инициализации регистров и ОЗУ продолжение программы приостанавливается на несколько секунд (осуществляется программная задержка). За это время напряжение питания МК и образцовое напряжение АЦП успевают достигнуть номинального уровня.
Для повышения быстродействия задействованные ячейки EEPROM копируются перед началом работы либо в регистры, либо в ОЗУ (блок Startup.asm). В большинстве случаев для этой цели используется специальный макрос EEPROMtoSRAM, находящийся в файле Macros.asm (на блок-схеме алгоритма не показан).
При таком подходе появляется возможность проверки считанных из EEPROM данных. Если введённый пользователем параметр настройки является недопустимым, он преобразуется к ближайшему допустимому значению (меньшему или большему). Это действие, условно называемое нормализация, выполняется не для всех ячеек, а только для тех, допустимые значения которых однозначны, а также для тех, недопустимые значения которых могут привести к явным ошибкам в работе устройства.
Допустимые значения ячеек EEPROM, а также значения по умолчанию указаны при описании ячеек в комментариях (блок Dimmer.asm). Значения некоторых ячеек умышленно ограничены диапазоном, удобным для восприятия и запоминания. Например, продолжительность включенного состояния функции ИПХ, задаваемая ячейкой eOwnersAtHomeOnPeriod, ограничена значением 240 минут, хотя функция могла бы исправно работать и при eOwnersAtHomeOnPeriod = 255. Однако значение 240 минут (4 часа) более привычно для запоминания и использования, нежели 255 минут (4,25 часа).
Одной из задач инициализации является однократное измерение сетевого напряжения. Поскольку заранее невозможно предсказать, в какой момент времени светильник будет подключен к сети, результатом этого измерения является случайное число, используемое далее в подпрограмме генератора псевдослучайных чисел как точка отсчёта seed (блок Procedures.EXT.asm).
Перед тем как передать управление основному блоку программа определяет, в каком состоянии находилось устройство перед отключением питания. В зависимости от результата устанавливаются те или иные флаги, сообщающие основной программе о том, какие действия необходимо предпринять. Например, если в момент пропадания сетевого напряжения был включен первый канал, то после восстановления электроснабжения он включится автоматически (если это было предварительно разрешено пользователем в настройках устройства).
Как уже отмечалось, код основного блока Main.asm выполняется в бесконечном цикле. Так как детектирование перехода сетевого напряжения через нуль осуществляется в каждом полупериоде, цикл Main.asm повторяется каждые 10 мс.
Первая команда основного блока – сброс сторожевого таймера. Следует отметить, что это единственное место во всей основной программе, где осуществляется сброс сторожевого таймера.
Первоначально для детектирования момента перехода сетевого напряжения через нуль использовался следующий алгоритм: АЦП циклически производил считывание входного напряжения и сравнивал результат преобразования с заданной константой. Как только происходило совпадение, подавалась команда на включение каналов, и цикл завершался. Из-за отсутствия кварцевой стабилизации тактовой частоты МК, для точного обнаружения момента перехода фазы сети через нуль требовался подбор константы под конкретный экземпляр МК. Был альтернативный вариант: вместо подбора константы осуществлять калибровку внутреннего RC генератора. И то и другое отрицательно сказывалось на повторяемости устройства. Но основная причина, побудившая изменить алгоритм, заключалась в невысокой помехоустойчивости. Действительно, если помеха (всплеск сетевого напряжения) возникала близко к моменту перехода фазы сети через нуль, МК продолжал измерять входное напряжение, ожидая его совпадения с константой. Поскольку после прекращения помехи входное напряжение оказывалось больше заданного константой, МК был вынужден оставаться в цикле измерений до следующего перехода фазы. Так как во время измерения напряжения каналы находятся в выключенном состоянии, визуально такой «простой» выглядел как моргание ламп(ы), т.к. в течение как минимум 10 мс напряжение на нагрузке отсутствовало.
Изменённый алгоритм основан на сравнении не с константой, а с предыдущим результатом измерения. Команда на включение каналов подаётся только тогда, когда текущий результат измерения становится больше предыдущего. В рассмотренном только что примере МК будет детектировать помеху как напряжение, превышающее предыдущее. Это приведёт к моментальному выходу из цикла, что визуально будет практически не заметно. В обычном режиме (без воздействия помех) МК осуществит выход из цикла, как только сетевое напряжение сменит направление с убывающего на возрастающее, т.е. сразу после перехода сетевого напряжения через нуль.
Таким образом, отпадает необходимость в кварцевом резонаторе, калибровке внутреннего генератора и в калибровке АЦП. Также не требуется дополнительная константа и настройка устройства под конкретный экземпляр МК.
Погрешность нового алгоритма нетрудно подсчитать. Для определения момента, когда сетевое напряжение начало возрастать, достаточно двух измерений. Время одного преобразования АЦП составляет 27 мкс (см. раздел Выбор_константы_cADCSamplesCount). Время на обработку полученного результата (первые 5 команд процедуры PhaseDetect) составит в худшем случае 8 мкс. Значит, максимальная погрешность равна 27 + 27 + 8 = 62 мкс. Согласно формуле U = A • sin(2 • p • f • t), при такой задержке мгновенное напряжение в сети будет находиться на уровне U = 310 • sin(2 • 3,14 • 100 • 62•10-6) = 12 В (относительно номинального сетевого напряжения).
Включение с интервалом 10 мс лампы мощностью 60 Вт с сопротивлением нити 882 Ом при напряжении 12 В создаст ток всего 12 / 882 = 14 мА. Такой малый ток не способен заметно повлиять на сокращение срока службы лампы, создать помехи, и т.п.
Ввиду разветвлённости алгоритма основной программы его наглядное изображение в графическом виде не приводится, т.к. будет затруднительно для восприятия. Отдельные процедуры основной программы описаны далее. Облегчить понимание логики работы призваны комментарии к программному коду.
Функция ИПХ (Имитация Присутствия Хозяев) использует в качестве счётчика времени во включенном и выключенном состоянии отдельную процедуру. Имеющуюся процедуру TurnOffTimeoutCh1 использовать нельзя. Тому есть три причины. Во-первых, она строго индивидуальна для каждого канала. Во-вторых, её модификация потребовала бы слишком больших усилий (понадобилось бы большое количество условных переходов). В-третьих, если продолжительность включенного или выключенного состояния составляет нечётное число, скажем, 3 минуты, то пришлось бы делить его поровну между двумя процедурами и иметь дело с дробными числами. Вариант, когда процедура выполняется только в одном из каналов, тоже не подходит, т.к. принято, что программный код обоих каналов одинаков (для удобства модификации и подсчёта времени выполнения программы).
В функции ИПХ практически везде опрашивается бит лишь одного (первого) канала. Это допустимо благодаря идентичности каналов, а также благодаря тому, что в данном режиме каналы управляются синхронно.
В момент включения функции ИПХ устанавливаются биты ebPowerState. Это сделано на случай пропадания сетевого напряжения в момент включения. Таким образом, при восстановлении напряжения работа функции будет продолжена.
В функции автоотключения процентное значение, на которое уменьшается яркость, умышленно ограничено интервалом от 10 до 90%. Такой диапазон хорошо подходит для визуального восприятия. Кроме того, уменьшение яркости менее чем на 10% незаметно.
Для определения значения регистра rSoftOffBrightChХ, хранящего величину уменьшенной яркости с учётом заданного пользователем процента, в целях ускорения программы используется табличный метод (таблица PercentageTable). Для каждого заданного пользователем значения процента Y, в таблице находится округлённое число Х, заранее вычисленное по формуле: X = ((100 – Y) / 100) • 256. Таблица состоит из (90 – 10) + 1 = 81 ячейки. Когда истекает время непрерывной работы канала, происходит обращение к таблице, затем текущее значение яркости умножается на полученное из таблицы число. Поскольку это число предварительно было умножено на 256, результат делится на 256 путём простого отбрасывания старшего байта, после чего результат округляется. Например, предположим, что текущая яркость, т.е. число в регистре rBrightnessChХ, равно 200, а заданный пользователем процент снижения яркости равен 25%. По истечении времени непрерывной работы канала программа обратится к таблице, в которой смещению 25 соответствует число 192. Программа произведёт умножение (200 • 192 = 38400), разделит результат на 256 (38400 / 256 = 150), округлит его (в данном примере в этом нет необходимости) и запишет итог в регистр rSoftOffBrightChХ. Нетрудно подсчитать, что исходная яркость 200, уменьшенная на 25%, действительно равна 150.
Несмотря на кажущееся сходство битов bIsChannelOn и ebPowerState, объединять их воедино нельзя. Вместе они предотвращают включение канала, если во время его выключения по истечении времени непрерывной работы был сбой в электросети.
Дребезг контактов кнопок SB1 и SB2 устраняется благодаря тому, что основная программа опрашивает их состояние каждый полупериод, т.е. каждые 10 мс. Устранению дребезга также способствует наличие внутреннего триггера Шмитта и линии задержки на входах МК.
Обработка состояния кнопок построена таким образом, что так называемое вторичное действие не поддерживается. Пример: в выключенном состоянии удерживание кнопки приводит к включению канала во втором режиме. Если продолжать удерживать кнопку, то после того как канал включился, его яркость не начнёт изменяться, как это обычно происходит при удерживании кнопки и включенном канале. Яркость можно будет изменить только после отпускания кнопки и повторного её удерживания. Такой подход более эргономичен, к тому же он позволяет исключить ошибки, связанные с детектированием нажатия и удерживания кнопок в зависимости от функции, режима, и текущего состояния устройства.
Реализация обработчика кнопок основана на анализе значения регистра rButtonХHoldTime, в котором хранится длительность удерживания кнопки в нажатом положении, а также на сравнении его значения с константой cButtonOnHoldSense, определяющей временной порог, начиная с которого нажатие на кнопку распознаётся как удерживание. Этот порог равен 1 секунде. В текущей версии он определён в коде программы, т.е. не может быть изменён конечным пользователем.
Регистр rButtonХHoldTime может иметь четыре значения:
1) rButtonХHoldTime = 0 (кнопка не нажата);
2) 0 < rButtonХHoldTime < cButtonOnHoldSense (кнопка нажата);
3) rButtonХHoldTime = cButtonOnHoldSense (кнопка удерживается);
4) rButtonХHoldTime = 255 (кнопка остаётся в нажатом положении после удерживания).
Последнее значение сигнализирует о том, что надо дождаться отпускания кнопки. Пока этот момент не наступит, никакие действия, связанные с обработкой состояния кнопки, не выполняются.
Подпрограммы чтения и записи EEPROM работают только с первыми 256 байтами. Это упрощает адресацию, т.к. старший регистр адреса всегда равен нулю и не используется.
Если в момент обращения к EEPROM идёт обработка предыдущего запроса, то подпрограмма чтения дожидается его окончания. Подпрограмма записи в аналогичной ситуации немедленно прекращается. Это вполне допустимо, поскольку задержка записи даже в несколько десятков миллисекунд не нарушает работу основной программы, и не заметна для пользователя.
Как уже отмечалось, согласно описанию МК, гарантированное число циклов перезаписи EEPROM составляет не более 100 000. По этой причине запись в ячейку осуществляется лишь в том случае, если записываемый байт данных отличается от того, что в ней уже записан.
В основе подпрограммы генерации псевдослучайного числа RandomNumber8bit лежит алгоритм [6, раздел 9.33 "Последовательности, генерируемые регистрами сдвига с обратными связями"]. Используется программно реализованный 8-ми разрядный регистр сдвига с отводами от 7-го, 5-го, 4-го и 3-го разряда, над которыми производится логическая операция исключающее или (XOR, в МК соответствует команде EOR).
Входными данными подпрограммы является seed – число, определяющее начало псевдослучайной последовательности. Это число должно быть
отлично от нуля. В противном случае оно заменяется числом 113. Почему именно 113? Потому что это первое число от начала списка, удачно располагающееся с точки зрения возвращаемого результата, умноженного на два. Первоначально seed генерируется путём измерения сетевого напряжения в момент подключения устройства к сети, что гарантирует действительно случайный характер seed.
Для повышения скорости выполнения подпрограммы и сокращения количества кода содержимое регистра SREG не сохраняется, хотя подпрограмма изменяет состояние некоторых его флагов.
Похожие работы
... УЛПМ-901. 11 Визуальный контроль качества сборки при увеличении 2,5. ГГ6366У/012. Маршрутная карта на техпроцесс изготовления печатной платы приведена в приложении. 8 ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ДИПЛОМНОГО ПРОЕКТА 8.1 Характеристика изделия «Модуль управления временными параметрами». Обоснование объема производства и расчетного периода Модуль управления временными параметрами – ...
... устройств относительно не велика, соответственно по форме финансирования это могут быть и частные фирмы и госпредприятия. Величина закупок данного вида устройств не может быть высока, т.к. операция измерения отношения двух напряжений является весьма специфической, хотя как таковая она может быть использована в управлении различными техпроцессами на заводах. Приобретая разрабатываемое устройство, ...
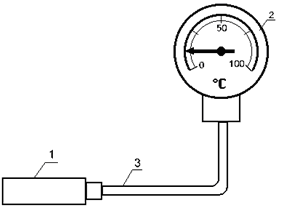


... среды; · расчет разности температур; · автоотключение; · индикатор разряда батареи; · подсветка дисплея; · питание 9 В («Крона»). 2 ОБОСНОВАНИЕ СПОСОБА ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОЙ СХЕМЫ УСТРОЙСТВА Функциональная схема устройства для измерения температуры в удаленных точках приведена на рис. 2.1. Устройство для измерения температуры в удаленных точках предназначенное для ...
... расчётов стоимости изготовления, очевидно, что предложенное устройство обладает конкурентоспособной ценой в условиях рыночной экономики, при промышленном производстве. При внедрении устройства автоматической подачи электропитания по расписанию, себестоимость его изготовления может быть снижена, за счёт экономии материалов и более низких цен на комплектующие при оптовой закупке. 4 Охрана труда ...
0 комментариев