Навигация
Разработка конструкции блока управления
18434
знака
6
таблиц
27
изображений
6. Разработка конструкции блока управления
Все устройства блока управления собраны на выбранных ранее операционных усилителях, резисторах, конденсаторов, стабилитронов и других элементах. Монтаж произведем на стеклотекстолитовую плату, монтаж элементов односторонний, разводка дорожек двухсторонняя. Расположение элементов соответствует наиболее рациональной разводке. Для определения размеров печатной платы необходимо сначала определить суммарную площадь, которую занимают элементы:
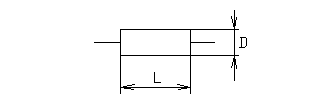
Резисторы
В схеме присутствуют три вида резисторов с разной мощностью.
| Тип резистора | Номинальная мощность | Размеры, мм | |
| D | L | ||
| С2–29В | 0.25 | 4.5 | 11 |
| 0.5 | 7.5 | 14 | |
| 1 | 9.8 | 20 | |
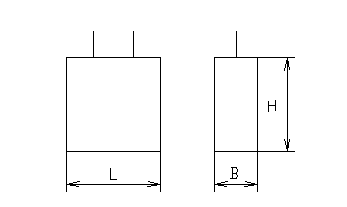
Конденсаторы
В схеме присутствуют два вида конденсаторов.
| Тип конденсатора | Размеры, мм | ||
| L | Н | В | |
| К10–17 | 6 | 5.5 | 4 |
| К71–7 | 26 | 32 | 16 |
Примечание: На цепи питания, отходящие от разъема, необходимо поставить полярные блокировочные конденсаторы, емкость которых зависит от потребляемого тока (т.е. на цепи +15В и –15 В – К50-31-25В-100мкФ, на цепь +5 В – конденсатор К50-31-25В-10мкФ)
Полярные конденсаторы:
| Тип конденсатора | Номинальная емкость | Размеры, мм | |
| D | L | ||
| К50-31 | 100 | 8.5 | 27 |
| 10 | 6 | 22 | |
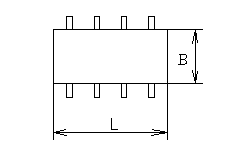
Микросхемы
В схеме присутствуют два вида микросхем: операционные усилители КР140УД25А, а так же логический ключ КР590КН2.
| Тип | Размеры, мм | ||
| n | L | B | |
| КР140УД25А | 7 | 12 | 7.5 |
| КР590КН2 | 16 | 20 | 7.5 |
Суммарная площадь, занимаемая элементами, составляет приблизительно:
 ,где
,где
Кразв – коэффициент, учитывающий «разводку» платы, принимаем равным 0.4
После приблизительного размещения элементов, выяснили, что длина печатной платы составляет 180 мм, из стандартного ряда выбираем ширину платы – 110 мм
![]()
Подача напряжений питания (+15 В, -15 В, +5 В), сигналов задания и снятие сигналов обратной связи осуществляется через разъем СНО51–30/59*9Р–2.
При дальнейшей разработке блока управления, учесть, что плата управления является отдельным функциональным блоком общей системы управления.
Плата управления вставляется в общий блок по направляющим (с точным совмещением разъемов).
Конденсаторы К71–7-0.5мкФ после пайки «приклеиваются» к плате.
Все элементы припаиваются припоем ПОС61 ГОСТ21930-76.
После пайки плата покрывается лаком.
Заключение
В данном курсовом проекте была разработана система управления скоростью электропривода с асинхронным двигателем и импульсно-ключевым регулятором в цепи ротора добавочного сопротивления. В качестве структуры была выбрана адаптивная система с эталонной моделью с П - регулятором в контуре скорости. Внутренний контур тока для лучшей отработки возмущающего воздействия настроен на технический оптимум. Приведены результаты моделирования, позволяющие сделать вывод о соответствии спроектированной системы техническому заданию.
Также были произведены расчет и выбор всех элементов, реализующих данную систему. По полученным результатам мы составили принципиальную электрическую схему, и предложили один из вариантов расположения элементов на печатной плате.
Список используемой литературы
1. Копылов И.П. «Справочник по электрическим машинам» М. 1988.
2. Елисеев В.А. «Справочник по автоматизированному электроприводу» М.1983.
3. Шурков В.Н. «Основы автоматизации производства и промышленные роботы» М. 1989.
4. Усатенко С.Т. «Выполнение электрических схем по ЕСКД» М.1983.
0 комментариев