Навигация
Система управления выпрямителя
28119
знаков
0
таблиц
10
изображений
2. Система управления выпрямителя
Система управления (СУ) выпрямителем предназначена для: а) формирования управляющих импульсов требуемой амплитуды и длительности; б) для жесткой синхронизации их с полупериодами фазных напряжений; в) для распределения управляющих импульсов по трем каналам в соответствии с числом фаз выпрямителя; г) для обеспечения плавного регулирования путем изменения угла управления ![]() .
.
Принципиальная схема системы управления, в которой реализован метод «вертикального» управления, приведена в приложении 1. В качестве базовых элементов для построения схемы использованы операционные усилители общего назначения.
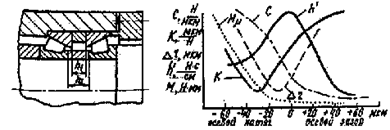
Временные диаграммы, поясняющие работу канала формирования импульсов управления тиристора фазы А приведены на рисунке 7.
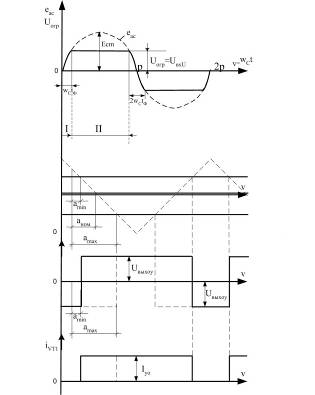
Рисунок 7.
Формирование импульсов управления тиристорами фазы В и С происходит аналогично, так как все три канала выполнены по идентичным схемам.
Синусоидальное напряжение фазы а (eac), снимаемое с дополнительной (синхронизирующей) обмотки силового трансформатора TV1, поступает на вход синхронизатора, собранного по схеме симметричного двустороннего ограничителя на диодах VD1, VD2. Из-за нелинейности вольтамперных характеристик диодов, на выходе синхронизатора формируется трапецеидальное напряжение с амплитудой ![]() , равной падению напряжения на открытом диоде и длительностью фронта
, равной падению напряжения на открытом диоде и длительностью фронта ![]() .
.
Прямой ток через диоды ограничивается резистором R1. Выходное напряжение ограничителя ![]() синхронизирует работу генератора пилообразного напряжения (ГПН), собранного на операционном усилителе DA1. Запуск ГПН осуществляется в моменты перехода фазного синхронизирующего напряжения через ноль, благодаря чему импульсы управления фаз a, b, c сдвинуты между собой на угол
синхронизирует работу генератора пилообразного напряжения (ГПН), собранного на операционном усилителе DA1. Запуск ГПН осуществляется в моменты перехода фазного синхронизирующего напряжения через ноль, благодаря чему импульсы управления фаз a, b, c сдвинуты между собой на угол ![]() . На выходе интегратора формируется пилообразное напряжение
. На выходе интегратора формируется пилообразное напряжение ![]() , период которого равен периоду сетевого напряжения, а амплитуда определяется постоянной интегрирования С1, R2.
, период которого равен периоду сетевого напряжения, а амплитуда определяется постоянной интегрирования С1, R2.
Резистор R4 стабилизирует режим работы интегратора по постоянному току. С выхода ГПН пилообразное напряжение через разделительный конденсатор С2 поступает на инвертирующий вход компаратора DA2. На неинвертирующий вход подается напряжение управления, снимаемое с резистора R6. В моменты равенства указанных напряжений компаратор переключается из одного насыщенного состояния в противоположное, вследствие чего на его выходе формируется последовательность разнополярных импульсов с частотой питающей сети. Положительный импульс выходного напряжения компаратора через ограничивающий резистор R7 поступает в цепь базы транзистора VT1, выполняющего функцию выходного усилителя мощности. При отпирании транзистора в его коллекторной цепи протекает импульс управляющего тока амплитудой ![]() , под действием которого светодиод оптрона излучает световой импульс и переводит силовой тиристор фазы А во включенное состояние. Для ограничения амплитуды управляющего тока включается резистор R8. В интервале времени, когда выходное напряжение компаратора отрицательно, транзистор VT1 закрыт.
, под действием которого светодиод оптрона излучает световой импульс и переводит силовой тиристор фазы А во включенное состояние. Для ограничения амплитуды управляющего тока включается резистор R8. В интервале времени, когда выходное напряжение компаратора отрицательно, транзистор VT1 закрыт.
3. Расчет системы управления выпрямителем
Расчет проводим по методике, изложенной в [1].
Расчет синхронизатора и генератора пилообразного напряжения.
1. В качестве диодов двустороннего ограничителя выбираем универсальные диоды типа 1N914А с параметрами: допустимый ток ![]() ; допустимое обратное напряжение
; допустимое обратное напряжение ![]() ; диапазон рабочих температур: 213К(-60°С)…393К(+120°С). Используемые диоды должны иметь малое дифференциальное сопротивление в открытом состоянии. Дальнейший расчет ограничителя проводим при следующих допущениях: а) диоды VD1, VD2 имеют идентичные параметры; б) дифференциальное сопротивление открытого диода равно нулю, т.е. напряжение на нем не зависит от прямого тока и равно пороговому напряжению диода; в) амплитуда синхронного напряжения
; диапазон рабочих температур: 213К(-60°С)…393К(+120°С). Используемые диоды должны иметь малое дифференциальное сопротивление в открытом состоянии. Дальнейший расчет ограничителя проводим при следующих допущениях: а) диоды VD1, VD2 имеют идентичные параметры; б) дифференциальное сопротивление открытого диода равно нулю, т.е. напряжение на нем не зависит от прямого тока и равно пороговому напряжению диода; в) амплитуда синхронного напряжения ![]() значительно больше напряжения ограничения
значительно больше напряжения ограничения ![]() ; г) входные токи операционного усилителя и обратные токи диодов VD1, VD2 равны нулю.
; г) входные токи операционного усилителя и обратные токи диодов VD1, VD2 равны нулю.
2. Задаемся прямым током через диод ограничителя при минимальном напряжении сети ![]() , по статической характеристике для
, по статической характеристике для ![]() определяем прямое падение напряжения на диоде
определяем прямое падение напряжения на диоде ![]() .
.
3. Определим длительность фронта выходного напряжения ограничителя. При ![]() , где
, где ![]() - амплитуда синхронизирующего напряжения. Так как в реальных схемах
- амплитуда синхронизирующего напряжения. Так как в реальных схемах ![]() , можно считать, что
, можно считать, что ![]() и
и ![]() , откуда
, откуда ![]() . С учетом допущений, принятых в п.1, мгновенное значение напряжения на выходе ограничителя:
. С учетом допущений, принятых в п.1, мгновенное значение напряжения на выходе ограничителя:
![]() при
при ![]()
![]() при
при ![]()
Тогда выходное напряжение интегратора на интервале ![]() будет описываться следующими зависимостями:
будет описываться следующими зависимостями:
при ![]()

при ![]()
 ,
,
где ![]() - напряжения на выходе интегратора вначале каждого участка.
- напряжения на выходе интегратора вначале каждого участка.
Проинтегрировав последние соотношения, получим:
![]() при
при ![]()
![]() при
при ![]()
Из полученных выражений видно, что выходное напряжение интегратора изменяется по линейному закону. Этот участок – рабочий, протяженность его должна быть выбрана так, чтобы в заданном диапазоне изменения напряжения сети и тока нагрузки на выходе компаратора обеспечить изменение угла регулирования от ![]() .
.
Исходя из этих соображений, задаемся величиной ![]() . Принимаем
. Принимаем ![]() , тогда требуемая амплитуда и действующее значение синхронизирующего напряжения сети:
, тогда требуемая амплитуда и действующее значение синхронизирующего напряжения сети:
![]()
![]()
4. Определим сопротивление резистора:
![]()
Выбираем стандартный резистор с сопротивлением 180 Ом.
5. Амплитуда и действующее значение синхронизирующего напряжения при максимальном напряжении сети:
![]()
![]()
6. Амплитуда прямого тока через диод ограничителя при максимальном напряжении сети:
![]()
7. Действующее значение тока в обмотке синхронизации при ![]() :
:
![]()
8. Производим расчет интегратора DA1. В качестве операционного усилителя используем микросхему AD8079 от Analog Devices, Inc. с параметрами: напряжение питания ![]() , максимальное входное напряжение
, максимальное входное напряжение ![]() , выходное напряжение
, выходное напряжение ![]() , входной ток
, входной ток ![]() , ЭДС смещения
, ЭДС смещения ![]() , диапазон рабочих температур (-40…+85°С).
, диапазон рабочих температур (-40…+85°С).
9. Определяем постоянную интегрирования С1R2. Для этого предварительно определим напряжения ![]() . При U=0 находим
. При U=0 находим ![]() , где
, где ![]() - амплитуда пилообразного напряжения.
- амплитуда пилообразного напряжения.
Напряжение ![]() определим из условия периодичности напряжения на выходе интегратора:
определим из условия периодичности напряжения на выходе интегратора:
![]()
![]()
![]() при
при ![]()
![]() при
при ![]()
При ![]() , получим:
, получим:
![]() ,
,
откуда постоянная интегрирования:
![]()
Для обеспечения режима линейного интегрирования задаемся амплитудой напряжения на выходе интегратора из условия ![]() , где
, где ![]() - минимальное выходное напряжение микросхемы AD8079.
- минимальное выходное напряжение микросхемы AD8079.
Принимаем ![]() , тогда:
, тогда:
![]()
10. Выбираем такой резистор R2, чтобы падение напряжения на нем, обусловленное входным током ОУ, составляло не более 5…10% входного напряжения. С другой стороны, номинал резистора R2 должен обеспечивать получение реализуемой емкости конденсатора С1. Принимаем ![]() . Тогда сопротивление резистора R2:
. Тогда сопротивление резистора R2:
![]()
Выбираем стандартный резистор с сопротивлением 10кОм.
11. Емкость интегрирующего конденсатора:
![]() .
.
Для получения требуемой емкости соединяем параллельно два стандартных конденсатора емкостью 30нФ и 1,5нФ.
12. С целью стабилизации режима работы по постоянному току интегратор охвачен отрицательной обратной связью через резистор R4, сопротивление которого выбираем так, чтобы постоянная времени цепи С3, R4 была хотя бы на порядок больше постоянной интегрирования С3R2. Принимаем R4=10R2=100кОм.
13. Для уменьшения погрешности интегрирования, обусловленной входным током микросхемы, включаем резистор R3, сопротивление которого выбираем из условия:
![]()
Выбираем стандартный резистор с сопротивлением 9,1кОм.
Расчет компаратора напряжения.
1. Определим сопротивление резистора R5. Поскольку амплитуда пилообразного напряжения, действующая на инвертирующем входе компаратора, ![]() , то по соображениям, приведенным в п. 10 раздела 3.1, находим:
, то по соображениям, приведенным в п. 10 раздела 3.1, находим:
![]()
Выбираем стандартный резистор с сопротивлением 18кОм.
2. Определяем емкость разделительного конденсатора С2. Конденсатор С2 не пропускает постоянную составляющую выходного напряжения интегратора, которая возникает из-за смещения «нуля», а также из-за неидентичности диодов VD1, VD2, на вход компаратора.
Емкость конденсатора выбираем из условия:
![]() ,
,
где ![]() - период синхронизирующего напряжения.
- период синхронизирующего напряжения.
Примем ![]()
![]()
Выбираем стандартный конденсатор емкостью 1,5мкФ.
3. На неинвертирующий вход компаратора подаем напряжение управления ![]() , снимаемое с резистора R6. Делитель напряжения R10, R11, R6 обеспечивает изменение угла регулирования в нужном диапазоне
, снимаемое с резистора R6. Делитель напряжения R10, R11, R6 обеспечивает изменение угла регулирования в нужном диапазоне ![]() . Напряжение, подаваемое на неинвертирующий вход компаратора и обеспечивающее минимальный угол регулирования
. Напряжение, подаваемое на неинвертирующий вход компаратора и обеспечивающее минимальный угол регулирования ![]() . Т.к.
. Т.к.
![]() ,
,
то напряжение для угла регулирования ![]() :
:
![]()
При ![]() :
:

Значит, переменный резистор R6, изменяя свое сопротивление от 0 до максимального значения, должен устанавливать напряжение на неинвертирующем входе от -0,118В до 1,191В.
Тогда, сопротивление резистора R11, учитывая входной ток ОУ:
![]() ,
,
выбираем стандартный резистор сопротивлением 20кОм.
![]() ,
,
выбираем стандартный резистор сопротивлением 200кОм.
Питание системы управления осуществляется от вспомогательного источника, вырабатывающего двухполярное напряжение ![]() В. Источник питается от сети напряжением 115В, 400 Гц и состоит из трансформатора TV2 типа ТА1-115-400 и диодного мостика, собранного на диодах 2Д106А.
В. Источник питается от сети напряжением 115В, 400 Гц и состоит из трансформатора TV2 типа ТА1-115-400 и диодного мостика, собранного на диодах 2Д106А.
Трансформатор имеет следующие параметры:
Сердечник ШЛ 6х10, номинальная мощность 7,5 ВА, максимальная мощность 10 ВА, ток первичной обмотки 0,14А, напряжение 6В снимается с выходов 13-14 или 15-16, токи вторичных обмоток 64мА.
Параметры диодов:
Максимальный прямой ток 0,3А, максимальный обратный ток 10мкА, максимальное обратное напряжение 100В, максимальное прямое напряжение 1В, рабочая частота до 30кГц, рабочая температура (-60…+125)°С.
Расчет выходного усилителя.
1. Максимальный ток коллектора транзистора: ![]() - импульсный отпирающий ток управления оптронного тиристора.
- импульсный отпирающий ток управления оптронного тиристора.
2. Максимальное напряжение на коллекторе закрытого транзистора: ![]() .
.
Параметры транзистора VT1 должны соответствовать требованиям: ![]() ,
, ![]() ,
, ![]() , где
, где ![]() - ток коллектора закрытого транзистора,
- ток коллектора закрытого транзистора, ![]() - неотпирающий ток управления тиристора.
- неотпирающий ток управления тиристора.
Выбираем транзистор КТ630Е с параметрами: ![]() ,
, ![]() , допустимое обратное напряжение база-эмиттер
, допустимое обратное напряжение база-эмиттер ![]() , статический коэффициент передачи тока базы
, статический коэффициент передачи тока базы ![]() , ток коллектора закрытого транзистора
, ток коллектора закрытого транзистора ![]() , граничная частота усиления
, граничная частота усиления ![]() . Максимально допустимая мощность рассеяния
. Максимально допустимая мощность рассеяния ![]() .
.
3. Сопротивление ограничивающего резистора R8 в цепи управления:
![]() ,
,
Где ![]() = 0.8 В – падение напряжения на открытом транзисторе при токе
= 0.8 В – падение напряжения на открытом транзисторе при токе ![]() = 150 мА, которое определяем по его выходным статическим характеристикам.
= 150 мА, которое определяем по его выходным статическим характеристикам.
![]() = 2,5 В – импульсное отпирающее напряжение управления тиристора
= 2,5 В – импульсное отпирающее напряжение управления тиристора
Выбираем стандартный резистор с сопротивлением 20 Ом.
4. Определяем эффективное значение коллекторного тока транзистора при минимальном угле управления ![]() :
:

5. Мощность потерь в резисторе R8:
![]()
6. Задаемся коэффициентом насыщения транзистора VT1 b = 1,2…1,5. Определяем требуемую амплитуду отпирающего тока базы:
![]()
Полученное значение тока удовлетворяет условие ![]() , где
, где ![]() - допустимый выходной ток операционного усилителя AD8079.
- допустимый выходной ток операционного усилителя AD8079.
7. Определяем сопротивление ограничивающего резистора в цепи базы:
![]() ,
,
где ![]() = 0,65 В – напряжение между эмиттером и базой насыщенного транзистора, определяем по входным характеристикам при токе
= 0,65 В – напряжение между эмиттером и базой насыщенного транзистора, определяем по входным характеристикам при токе ![]() = 1,4 мА
= 1,4 мА
Выбираем стандартный резистор с сопротивлением 1,5 кОм.
8. Максимальное обратное напряжение на базе транзистора меньше допустимого: ![]()
Следовательно, дополнительных мер для ограничения обратного напряжения на базе транзистора принимать не будем.
9. Определим мощность потерь в транзисторе в интервале его открытого состояния при минимальном угле регулирования ![]() :
:

Мощностью потерь на переключение и потерями в транзисторе в закрытом состоянии можно пренебречь, учитывая низкую частоту переключения. Так как ![]() , то транзистор по мощности выбран правильно.
, то транзистор по мощности выбран правильно.
10. Определяем минимальную длительность управляющего импульса тиристора при максимальном угле регулирования ![]() :
:

Так как ![]() с, то во всем диапазоне изменения
с, то во всем диапазоне изменения ![]() надежное включение тиристора будет обеспечено.
надежное включение тиристора будет обеспечено.
Расчет устройства плавного запуска.
Устройство плавного запуска состоит из конденсатора С4, который шунтирует резистор R11 при включении выпрямителя. Номинал конденсатора выбирается исходя из желаемого времени плавного запуска. В нашем случае время конкретно не оговорено, поэтому используем стандартный конденсатор емкостью 33мкФ и напряжением 30В.
Расчет синхронизирующей обмотки трансформатора.
Как было указано выше, амплитуда и действующее значение синхронизирующего напряжения сети:
![]()
![]()
Тогда, исходя из этих минимальных значений, посчитаем число витков синхронизирующей обмотки:
![]() витка.
витка.
Выводы
При выполнении курсовой работы был разработан несимметричный трехфазный тиристорный управляемый выпрямитель с плавным запуском и системой управления. В ходе разработки были определены основные параметры схемы, номиналы элементов, был рассчитан трансформатор и сглаживающий дроссель.
Параметры расчетов отвечают требованиям задания курсовой работы.
Использованная литература
1. Руденко В.С., Морозов В.Г., Ромашко В.Я. Методические указания к курсовой работе по курсу «Преобразовательная техника», Киев КПИ 1984г.
2. В.С. Руденко, В.Я. Ромашко, В.Г. Морозов, «Перетворювальна техніка», Київ 1996р.
3. В.Е. Китаев, А.А. Бокуняев, «Расчет источников электропитания устройств связи», М. 1979г.
4. Ю.С. Забродин, «Промышленная электроника», М. 1982г.
5. И.И. Белопольский и др., «Расчет трансформаторов и дросселей малой мощности», М. 1973г.
6. Ромаш Э.М. Источники вторичного электропитания РЭА, М.: Радио и связь, 1981г.
7. Костиков В.Г., Никитин В. Е. Источники электропитания высокого напряжения, М.: Радио и связь, 1986г.
8. Найвельт Г.С. И др. Источники электропитания радиоэлектронной аппаратуры, М.: Радио и связь, 1985г.
9. Букреев С.С. Головацкий Г.Н. Источники вторичного электропитания, М.: Радио и связь, 1983г.
10. Костиков В.Г., Парфенов Е.М., Шахнов В.А. Источники электропитания электронных средств, М.: Горячая линия – Телеком, 2001г.
Похожие работы
... . Это позволяет: -снизить трудоемкость обработки -снизить себестоимость обработки -сократить время обработки и обслуживания. Ожидаемый частный годовой экономический эффект от автоматизации шлифовального процесса путем разработки автоматической системы управления параметров станка является снижение затрат на обработку детали типа кольцо ступенчатое при годовой программе выпуска 1000 ед. ...
... (М) при заданных скоростях ветрового потока (ВП). При этом математическое описание параметров ВП может быть получена вероятностными методами. Рисунок 1.9 – Структурная схема ВЭУ Одним из возможных направлений разработки АЭП имитатора является его реализация на базе привода постоянного тока (рис. 1.10). Одним из достоинств ДПТ является широкое и плавное регулирование скорости вращения, ...
... пунктов (ОУП) линий междугородной телефонно-телеграфной связи, для питания аппаратуры телеграфов и районных узлов связи (РУС). ВУТ с номинальным напряжением 60В применяются для питания аппаратуры автоматических телефонных станций (АТС) городской телефонной сети, аппаратуры, междугородной автоматики, питания, аппаратуры телеграфов и РУС. ВУТ 152/50 применяются для питания моторных цепей. ВУТ 280 ...
... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
0 комментариев